Clear Sky Science · de
Ein paralleles, beinbeiniges Insektenmaßstab-Roboter basierend auf einem Aktuator-Struktur-integrierten Origami-Mechanismus
Kleine Roboter für enge Räume
Stellen Sie sich einen Rettungsroboter vor, der so klein und leicht ist, dass er durch einen Riss in einer Wand schlüpfen, entlang eines schmalen Rohrs kriechen oder sogar über eine Wasserlache schwimmen kann. Dieses Paper stellt genau eine solche Maschine vor: einen handflächengroßen, insektenähnlichen Roboter namens PLioBot, der aus einem einzigen gefalteten Blatt entsteht, für seine Größe sehr schnell ist und mit vielen Arten von unebenem Gelände zurechtkommt. Die Forschenden zeigen, wie sich geschicktes Falten mit winzigen Vibrationsmotoren kombinieren lässt, um flache Materialien in wendige Erkundungsroboter für beengte, schwer zugängliche Bereiche zu verwandeln.
Von der flachen Platte zum vierbeinigen Kriecher
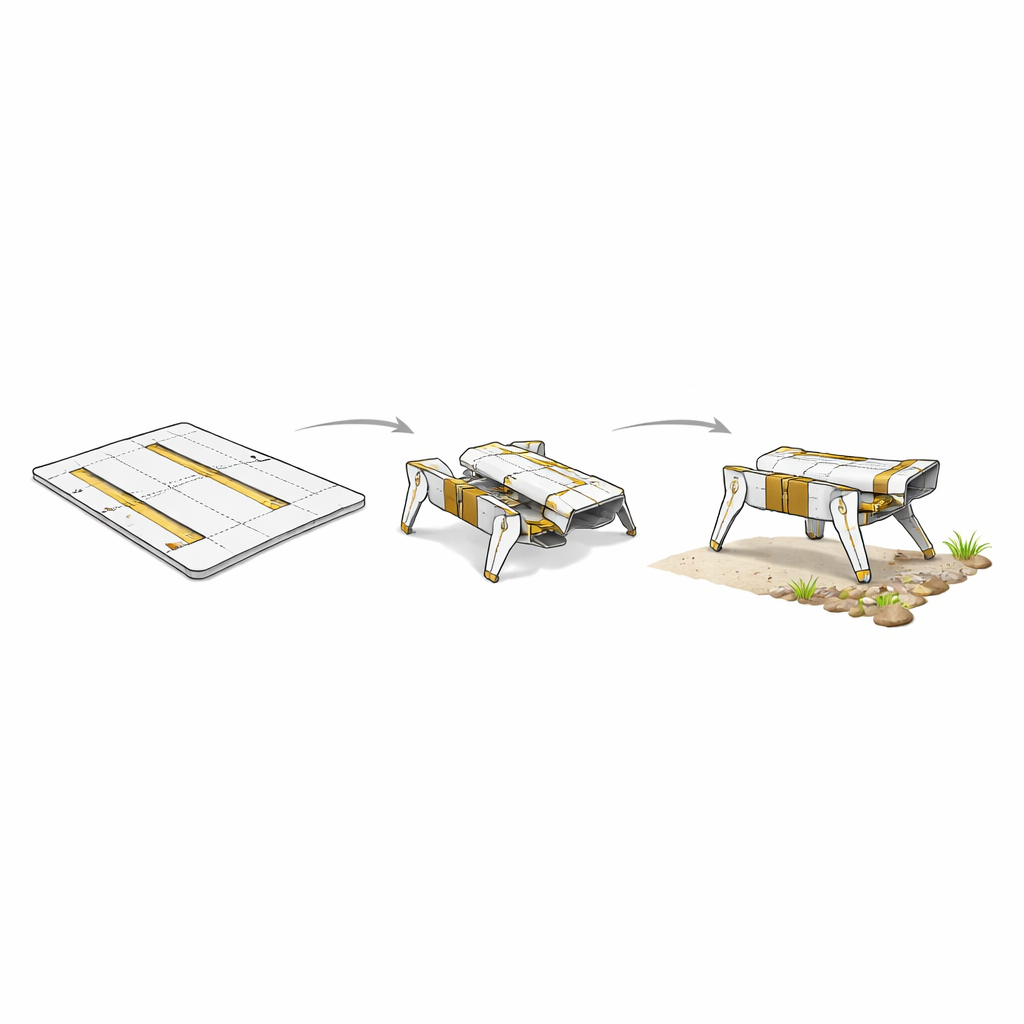
PLioBot beginnt sein Leben als flaches Muster, ähnlich einem ausgeschnittenen und gefalteten Papier-Spielzeug. Statt Papier besteht das Muster aus einem fünflagigen Sandwich aus Glasfaser, Kohlefaser, einer flexiblen Kunststofffolie und Streifen aus piezoelektrischem Keramikmaterial, die als Muskeln fungieren. Präzise platzierte dünne Bereiche in der Kunststoffschicht dienen als Gelenke. Nach dem Laserschneiden wird die gesamte Struktur in einer choreografierten Reihenfolge gefaltet, sodass Körper, vier Beine und alle acht Aktuatoren aus einem durchgehenden Stück hervorgehen. Keine Schrauben, keine separaten Motoren und keine manuelle Ausrichtung sind nötig — allein das Falten ergibt einen vollständigen Roboter von etwa 2,5 Zentimetern Länge und nur 1,2 Gramm Gewicht.
Wie winzige Beine große Schritte machen
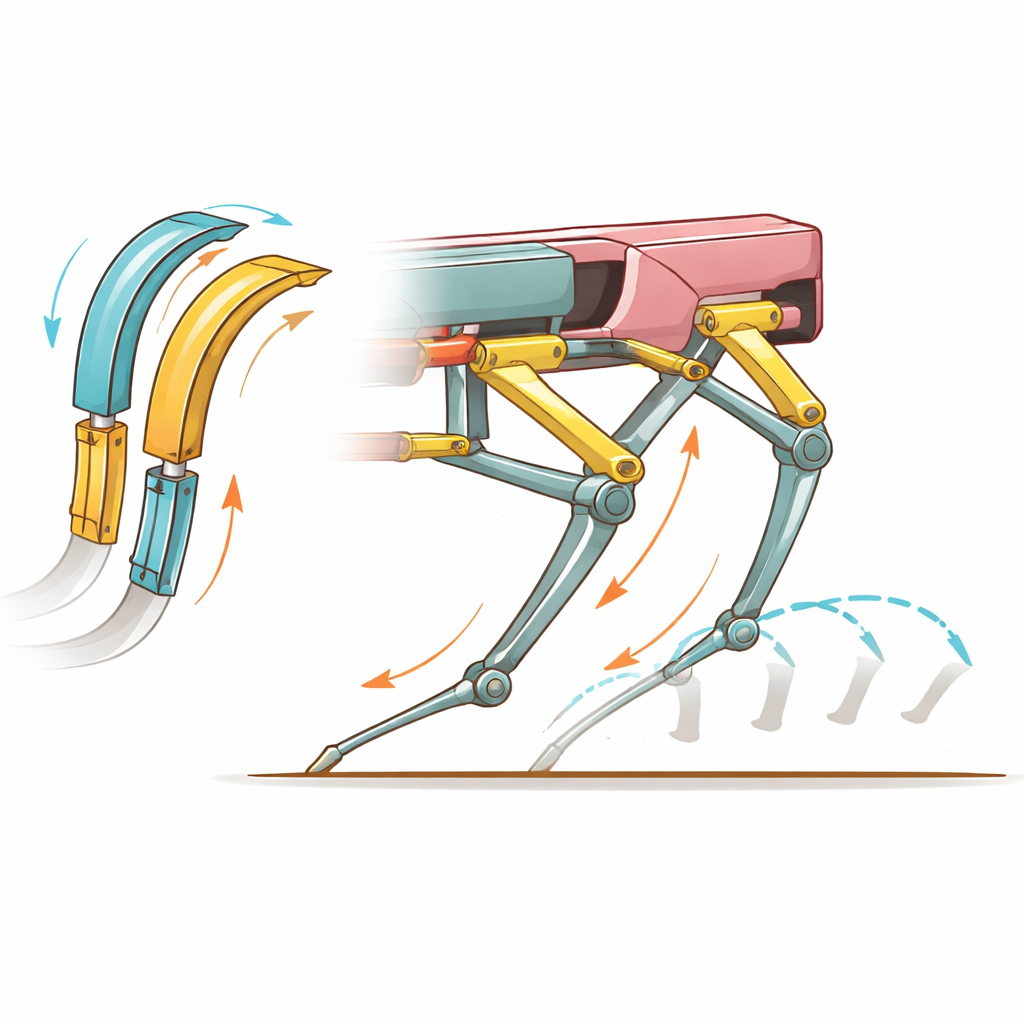
Die Bewegung des Roboters stammt von piezoelektrischer Keramik — Materialien, die sich leicht verbiegen, wenn eine elektrische Spannung anliegt. Jede Seite von PLioBot trägt ein Paar „Zwillings“-Streifenaktuatoren. Wenn Wechselspannungen diese Streifen vor- und zurückbiegen lassen, wird ihre Bewegung über ein Set gelenkiger Verbindungselemente weitergegeben, die wie ein miniaturisierter paralleler Beinmechanismus wirken. Durch sorgfältiges Timing der Signale kann jedes Bein sich auf und ab sowie vor und zurück bewegen und mit seinem Fuß einen Schleifenpfad nachzeichnen. Die Koordination aller vier Beine in einem trottähnlichen Muster erlaubt es dem Roboter, effizient gegen den Boden zu drücken und vorwärts zu schnellen. Bei optimalen Einstellungen erreicht PLioBot 44,6 Zentimeter pro Sekunde — etwa 18 Körperlängen pro Sekunde — und gehört damit zu den schnellsten beinigen Robotern in dieser Größenordnung.
Eingebaute Muskeln, weniger Montageaufwand
Die meisten Insektenmaßstab-Roboter werden mühselig aus vielen winzigen Teilen zusammengesetzt: separate Motoren oder Aktuatoren, Rahmen und Verbindungsglieder, die alle von Hand ausgerichtet werden müssen. Das erhöht die Kosten, begrenzt die Präzision und erschwert die Massenproduktion. Die Autor*innen gehen dieses Problem an, indem sie Struktur und Aktuation vollständig in einen einzigen „Origami-Mechanismus“ integrieren. Sie verwenden einen verfeinerten Laminierungsprozess, bei dem alle Schichten — starre Glasfaseraußenlagen, orthogonale Kohlefaser-Elektroden, die flexible Scharnierfolie und die Keramikstreifen — geschnitten, gestapelt, mittels Passlöchern ausgerichtet und vor dem finalen Konturschnitt heißgepresst werden. Das Ergebnis ist ein robustes Flachblanko, das bereits das Skelett, die Gelenke und die Muskeln des Roboters in ihrer Endposition enthält und bereit ist, zu seiner endgültigen Form gefaltet zu werden.
Laufen, Klettern und Schwimmen im realen Gelände
Um zu prüfen, ob ihr Design auch außerhalb des Labortisches nützlich ist, testete das Team PLioBot an einer Reihe alltäglicher Hindernisse. Auf glattem Glas droht Ausrutschen, doch der Roboter bewegt sich trotzdem schnell; auf Schwamm und Acryl erhöht sich die Traktion zulasten etwas Geschwindigkeit. Er erklimmt Rampen bis zu 12 Grad und kann Lasten transportieren, die schwerer sind als er selbst — bis zu 1,7 Gramm, mit besonders guter Leistung unter etwa 0,8 Gramm. In engen Tunneln von nur 3 Zentimetern Breite und weniger als 3 Zentimetern Höhe trägt der Roboter eine Last von 1,4 Gramm und hält trotzdem mehrere Körperlängen pro Sekunde. Durch den Austausch gegen halbkugelförmige Fußpolster oder flossenartige Paddel bewältigt PLioBot Kies und Gras, überquert sich verändernden Sand ohne Einsinken, läuft am Boden eines Aquariums entlang und schwimmt sogar auf der Wasseroberfläche, wobei allein seine Flossen den Vortrieb liefern.
Was das für künftige winzige Erkundungsroboter bedeutet
Vereinfacht gesagt zeigt diese Arbeit, dass man einen sehr kleinen Roboter drucken und falten kann, dessen Körper und Muskeln ein einteiliges Bauteil bilden, und dass dieser Roboter schnell ist und viele unordentliche, reale Oberflächen bewältigt. PLioBot ist noch auf externe Stromleitungen angewiesen und daher noch nicht völlig autark. Aber das integrierte Origami-Design und das Fertigungsverfahren weisen in eine Zukunft, in der große Stückzahlen kostengünstiger Insektenmaßstab-Roboter wie flache Teile produziert, zu ihrer Form gefaltet und mit Miniaturbatterien und Steuerelektronik ausgestattet werden könnten. Solche Schwärme könnten eines Tages beschädigte Gebäude erkunden, Industrieleitungen inspizieren oder andere Planeten erforschen — ausgehend von etwas, das auf den ersten Blick wie ein clever zugeschnittenes Blatt aussieht.
Zitation: Zhu, Q., Jiang, T., Luo, Z. et al. A parallel-legged insect-scale robot based on actuation-structure integrated origami mechanism. Microsyst Nanoeng 12, 92 (2026). https://doi.org/10.1038/s41378-026-01205-4
Schlüsselwörter: Insektenmaßstab-Roboter, Origami-Robotik, piezoelektrische Aktuatoren, geländerangepasste Fortbewegung, Mikro-Roboter-Fertigung