Clear Sky Science · de
Formgedächtnislegierungen in Drahtform als Aktuatoren: Modellierung, Design und Regelung
Metallfäden, die sich an ihre Form „erinnern“
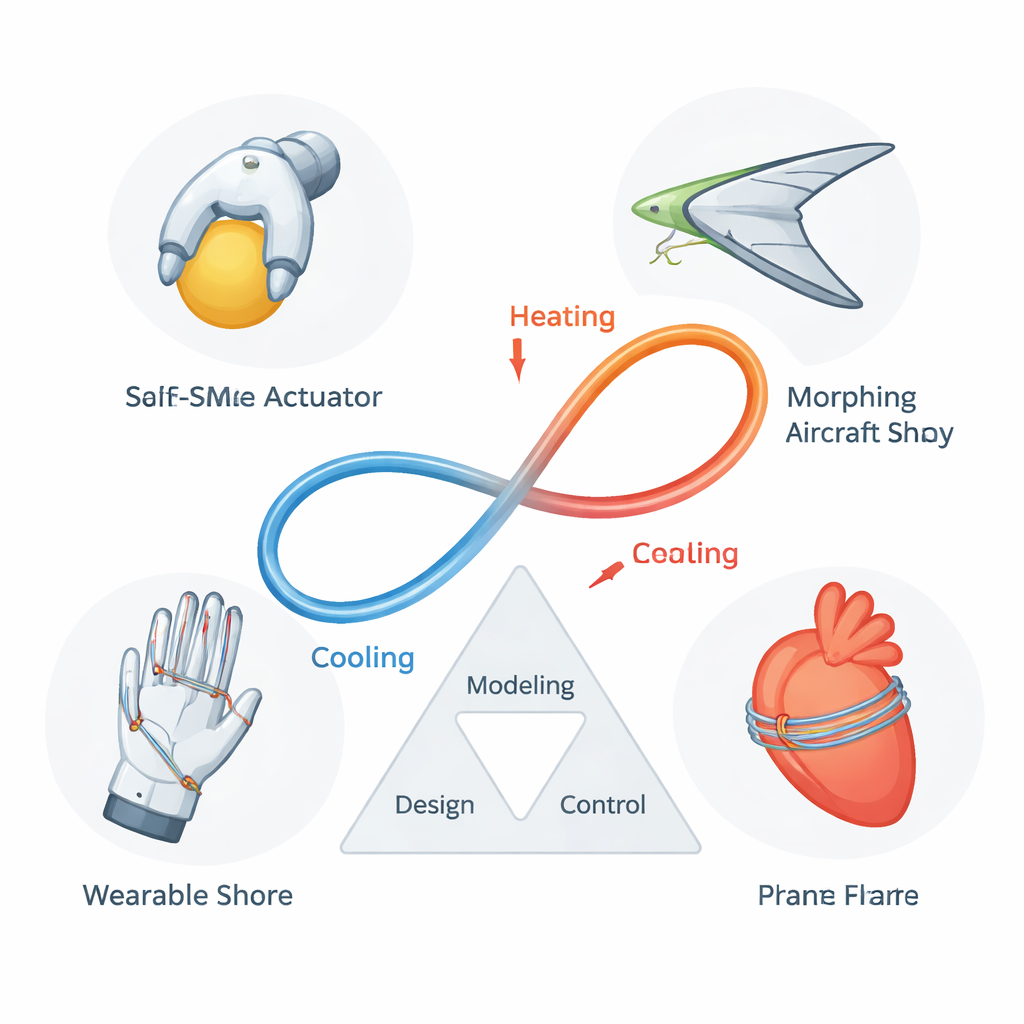
Stellen Sie sich einen dünnen Metalldraht vor, der wie ein Muskel ziehen kann, leise einen Roboterfinger beugt, die Form einer Flugzeugflosse während des Fluges verändert oder sanft ein versagendes Herz umschließt – allein durch Erwärmen und Abkühlen. Dieser Übersichtsartikel betrachtet solche Drähte aus Formgedächtnislegierungen (FGL) und erklärt, wie sie funktionieren, wie Ingenieure sie entwerfen und regeln und wo sie bereits in Robotern, Flugzeugen, medizinischen Geräten und tragbarer Technologie eingesetzt werden.
Wie intelligente Metalldrähte lebendig werden
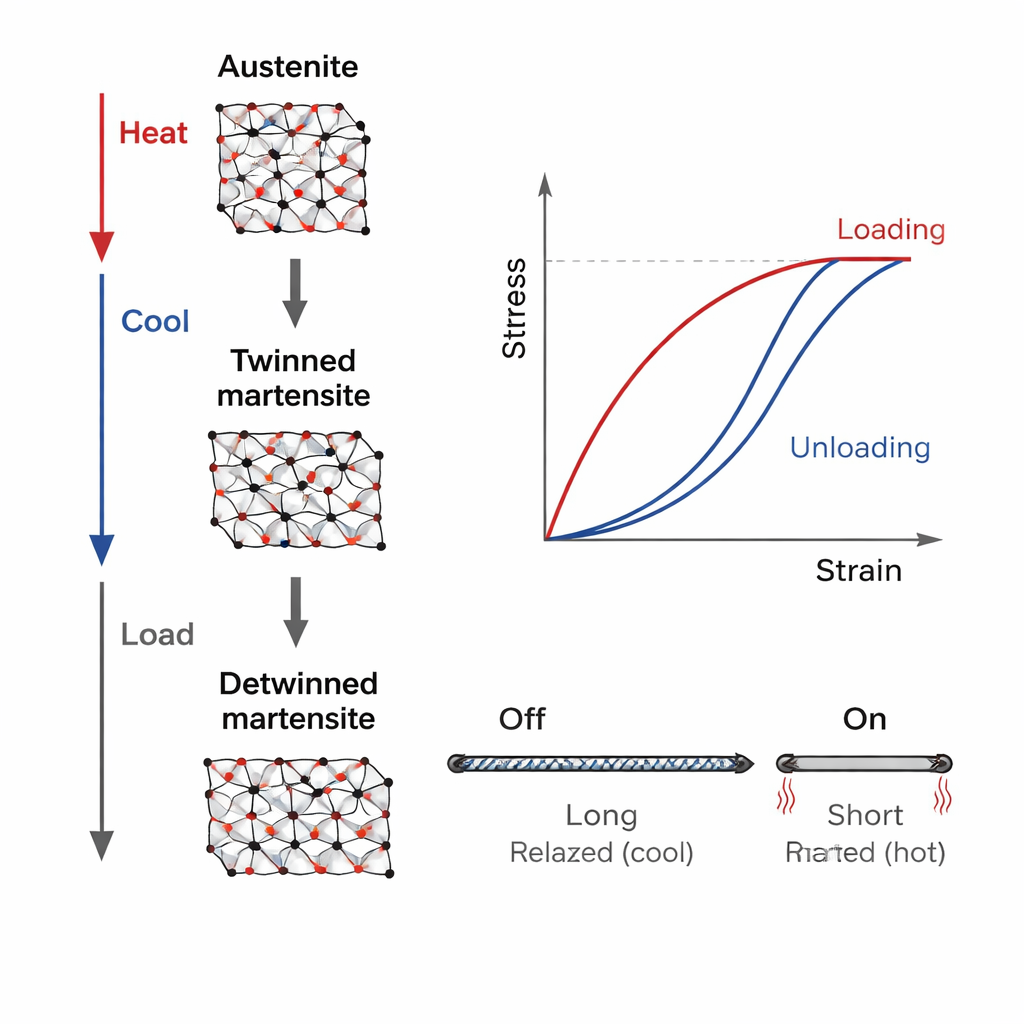
Formgedächtnislegierungen sind besondere Metalle, die verformt werden können und dann bei Temperaturänderung in eine voreingestellte Form zurückkehren. In einem Modus, dem Formgedächtniseffekt, lässt sich der Draht bei kühlerer, relativ weicher Temperatur biegen; beim Erhitzen schnellt er in seine Ursprungsform zurück. In einem anderen Modus, der Superelastizität, kann die Legierung unter Belastung gestreckt werden und kehrt nach Entlastung wieder in ihre Form zurück. Dieses Verhalten beruht im Inneren des Metalls auf festkörperlichen Phasenumwandlungen zwischen unterschiedlichen Kristallanordnungen, was die Reaktion stark nichtlinear und etwas schwer vorhersehbar macht. Da FGL-Drähte dünn sind, können Ingenieure sie meist als eindimensionale Elemente behandeln, was die mathematischen Modelle vereinfacht, die beschreiben, wie Temperatur, Spannung, Dehnung und elektrischer Strom miteinander verknüpft sind.
Von Gleichungen zu datengetriebenen Modellen
Damit sich diese intelligenten Drähte zuverlässig einsetzen lassen, benötigen Entwickler Modelle, die vorhersagen, wie stark sie ziehen können, wie weit sie sich bewegen, wie heiß sie werden und wie sich ihr elektrischer Widerstand verändert. Klassische „konstitutive“ Modelle behandeln den Draht als Volumenmaterial und verfolgen, wie sich seine inneren Phasen mit Spannung und Temperatur ändern. Diese Modelle sind effizient, beruhen jedoch auf vereinfachenden Annahmen. Parallel dazu verwenden Forschende zunehmend maschinelles Lernen und neuronale Netze, um das Verhalten des Drahtes direkt aus experimentellen Daten zu erlernen und so subtile Hysteresen- und Historieneffekte abzubilden. Eine weitere wichtige Forschungsrichtung untersucht, wie sich der elektrische Widerstand und die Temperatur des Drahtes bei stromgesteuertem Erhitzen entwickeln, was Self-Sensing ermöglicht – die Fähigkeit, Kraft oder Bewegung allein durch Widerstandsmessung abzuschätzen, statt zusätzliche Sensoren einzubauen.
Bewegung erzeugen: Einfache Lasten, weiche Strukturen und künstliche Muskeln
Auf der Hardware-Seite ordnet der Artikel drahtbasierte FGL-Aktuatoren danach, wie sie belastet werden. In den einfachsten „linearen Last“-Anordnungen zieht ein Draht gegen eine Feder oder ein Gewicht und treibt Greifer oder Auslösemechanismen im Weltraum an. Anspruchsvollere „nichtlineare Last“-Systeme betten Drähte in flexible Balken, weiche Polymere, Textilien oder origamiähnliche Strukturen ein, um große Biegungsbewegungen, kriechende Roboter und gewebte Exoskelett-Handschuhe zu erreichen. Differentielle Konfigurationen verwenden zwei oder mehr gegenüberliegende Drähte, die Muskelpaare wie Bizeps und Trizeps nachahmen, um schnelle, reversible Bewegungen in Gelenken wie künstlichen Ellbogen und Knöcheln zu ermöglichen. Da sich ein FGL-Draht nur um etwa 8 % verkürzen kann, ist ein zentrales Designthema die Hubverstärkung: lange Drähte um Umlenkrollen wickeln, sie auf gekrümmten Bahnen anordnen, modulare Gleit- oder Rotationsstufen einsetzen oder FGL-Federn verwenden, um größere Bewegungen auf engem Raum zu erzielen.
Intelligente Drähte gehorchen lehren
Die Regelung dieser Aktuatoren ist anspruchsvoll, weil ihre Reaktion sowohl von der Temperatur als auch von der mechanischen Historie abhängt. Der Artikel gibt einen Überblick über ein Spektrum von Regelungsstrategien, von klassischen PID-Reglern bis hin zu ausgefeilteren Konzepten. Modellbasierte Ansätze nutzen physikabgeleitete Gleichungen oder Hysteresemodelle, um Sliding-Mode-Regler und Vorsteuerungskompensatoren zu entwerfen, die die Nichtlinearität ausgleichen. Neuronale Netzwerke und Reinforcement-Learning-Regler gehen weiter und lernen, den Draht so anzusteuern, dass eine präzise Bewegung erreicht wird, ohne auf perfekte Modelle angewiesen zu sein. Gleichzeitig verwenden Self-Sensing-Regelmethoden die sich ändernde Widerstandswerte des Drahtes als eingebettetes Rücksignals, manchmal in Kombination mit neuronalen Netzen, um Position oder Kraft ohne sperrige externe Sensoren abzuschätzen.
Reale Anwendungen und künftige Richtungen
Drahtförmige FGL-Aktuatoren treiben bereits weiche robotische Greifer, winzige kriechende Roboter, morphende Flugzeugflügel, Satelliten-Auslösevorrichtungen, implantierbare Pumpen und Stents, Herzunterstützungsbänder, Kompressionsbekleidung, Exoskelett-Anzüge und Rehabilitationshandschuhe an. In all diesen Bereichen bleiben gemeinsame Hürden: langsames Abkühlen und Wärmeaufbau, Ermüdung über viele Zyklen, Regelkomplexität und Herstellkosten. Die Autorinnen und Autoren argumentieren, dass Fortschritte davon abhängen werden, drei Stränge zu integrieren: bessere multiskalige und datenangereicherte Modelle, intelligentere Strukturentwürfe, die FGLs mit flexibler Elektronik und multifunktionalen Materialien kombinieren, sowie intelligente Regelstrategien, die sich online anpassen. Sie stellen sich einheitliche „Modellierung–Design–Regelung“-Rahmenwerke vor, unterstützt von Digital Twins und maschinellem Lernen, die diese Aspekte gemeinsam co-optimieren. Für eine Laienzielgruppe lautet die Botschaft: Diese formwandelnden Drähte reifen von Laborexoten zu praktischen künstlichen Muskeln heran und haben das Potenzial, in den kommenden Jahren Maschinen, medizinische Geräte und tragbare Systeme leise neu zu gestalten.
Zitation: Zhang, R., Yue, H., Sun, H. et al. Wire-form shape memory alloy actuators: modeling, design, and control. Microsyst Nanoeng 12, 76 (2026). https://doi.org/10.1038/s41378-026-01161-z
Schlüsselwörter: Formgedächtnislegierung, weiche Robotik, intelligente Aktuatoren, morphende Strukturen, tragbare Geräte