Clear Sky Science · ar
تخطيط شبكي احتمالي مستوحى من الدماغ باستخدام البنى الرمزية المتجهية
روبوتات ترى العالم كطعْمَة من الرقع
كل سيارة ذاتية القيادة أو روبوت مستودعات أو مكنسة منزلية تحتاج إلى صورة ذهنية سريعة لما يحيط بها: ما هو صلب، وما هو فراغ، وما هو ما زال مجهولاً. تقدم هذه الورقة طريقة جديدة للروبوتات لبناء تلك الصورة — المسماة خريطة شبكة الشغل — تستعير أفكاراً من كيفية احتمال أن يمثل الدماغ المعلومات، بهدف الحفاظ على دقة الخرائط مع جعل حسابها أسرع وأكثر كفاءة بكثير.
تحويل نقرات المستشعر الخام إلى خريطة للعالم
غالباً ما تستخدم الروبوتات ماسحات ليزر أو مستشعرات مسافة أخرى لمسح العالم أثناء حركتها، مجمعة سحب نقاط تظهر أماكن الأشياء وأين المساحات فارغة. تقنية كلاسيكية، تخطيط شبكة الشغل، تقسم البيئة إلى خلايا صغيرة، مثل بكسلات على شاشة، وتمنح كل خلية احتمال أن تكون مشغولة. الطرق التقليدية تتعامل مع هذا كمشكلة إحصائية مكثفة، متتبعة عدم اليقين بعناية لكنها تستهلك وقتاً وذاكرة كثيرين. الطرق العصبية الحديثة أسرع ويمكنها ملء الفجوات، لكنها تعمل كصناديق سوداء، قد تكون صعبة الثقة في سياقات حرجة للسلامة، وعادة ما تحتاج إلى إعادة تدريب لكل بيئة جديدة.
طريق وسط مستوحى من الدماغ
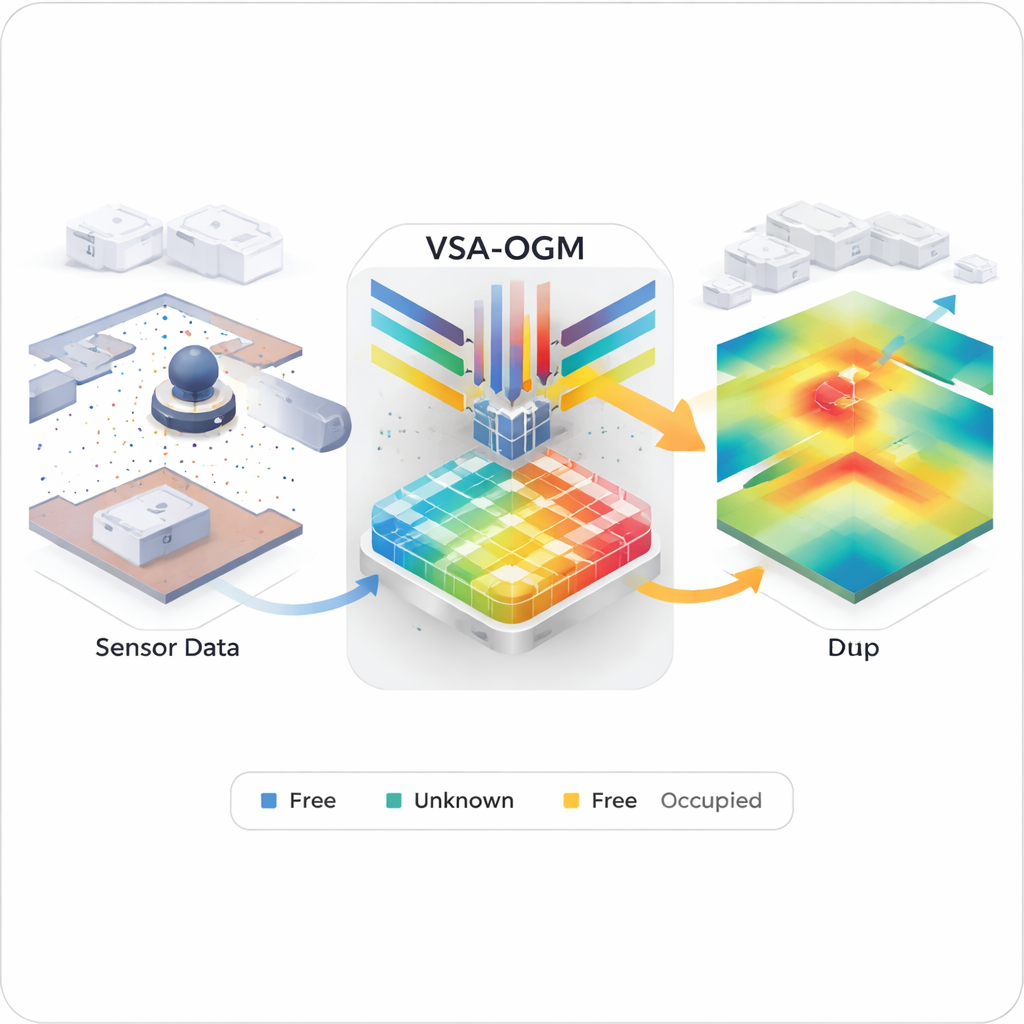
يقترح المؤلفون حلّاً "عصبياً-رمزياً" يُسمى VSA-OGM، اختصاراً لـ Vector Symbolic Architecture Occupancy Grid Mapping. بدلاً من تخزين كل التفاصيل في شبكة كثيفة أو دفن البنية داخل ملايين أوزان الشبكات العصبية، تقوم الطريقة بترميز قراءات المستشعر كمتجهات طويلة جداً في فضاء عالي البُعد — فكرة رياضية مستوحاة من نظريات حول كيفية تمثيل مجموعات الخلايا العصبية للمفاهيم والمواقع. تقسم البيئة إلى بلاطات، ولكل بلاطة ذاكرات متجهية لأدلة "مشغولة" و"فارغة". بينما يتحرك الروبوت ويجمع سحب النقاط، يتحول كل ملاحظة إلى أحد هذه المتجهات فائقة الأبعاد وتُجمَع في ذاكرة البلاطة المناسبة، مجمعة المعلومات بكفاءة عبر الزمن.
من المتجهات الصاخبة إلى خرائط واضحة
بالطبع، جمع إشارات عديدة في ذاكرة عالية الأبعاد واحدة يخاطر بإنشاء كتلة ضوضائية يصعب قراءتها. يعالج VSA-OGM هذا الأمر عبر خط فك ترميز مصمم بعناية. أولاً، يقارن ذواكر البلاطات مقابل متجهات تمثل مواضع في الفضاء، منتجاً "شبه-احتمالات" تقريبية للاشغال. ثم يطبق سلسلة من الخطوات غير الخطية وأداة من نظرية المعلومات، إنتروبيا شانون، لاستخلاص الأماكن التي تدعم فيها البيانات بقوة فئة على أخرى. أخيراً، يستخدم دالة سوفتماكس لتحويل هذه الإشارات إلى احصاءات احتمالية حقيقية ويجمعها في خريطة نهائية تُظهر الفرق الموقّع بين "مشغول" و"فارغ". النتيجة هي شبكة شغل ناعمة تستدعي القيم عبر مناطق مقاسة بشكل متناثر بينما تظل احتمالية وقابلة للتفسير بالكامل.
خرائط أسرع لروبوت واحد — أو للعديد
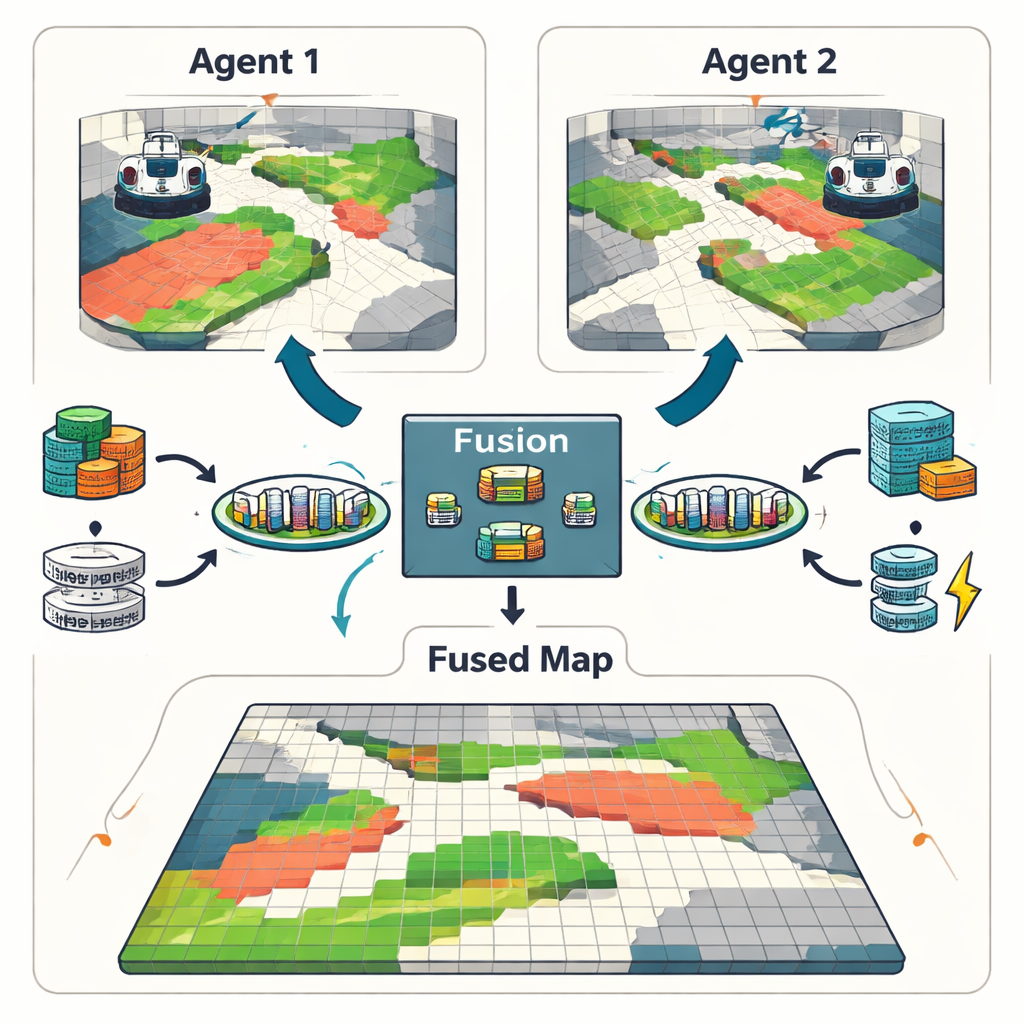
لاختبار النهج، نفذ الباحثون VSA-OGM على عدة مجموعات بيانات محاكاة وحقيقية، بما في ذلك خريطة روبوت داخلية كلاسيكية وسيناريو قيادة واسع النطاق. مقابل معايير تقليدية قوية تُنمذج بعناية الارتباطات المكانية، حقق VSA-OGM دقة خرائط مشابهة لكنه استهلك ذاكرة أقل بنحو 400 مرة وعمل أسرع بما يصل إلى 45 مرة. بالمقارنة مع طرق تقليدية مبسطة تتخلى عن بعض التفاصيل الإحصائية، ظل يطابق الدقة مع خفض الكمون بحوالي عامل خمسة. عند مقارنته بنظام شبكات عصبي يتطلب ساعات من التدريب وملايين المعاملات، قدّم VSA-OGM جودة خرائط مماثلة من دون تدريب مسبق وخفّض زمن معالجة الإطار الواحد بما يصل إلى ستة أضعاف. يدعم الإطار أيضاً عدة روبوتات: ذاكرات المتجهات من عوامل مختلفة يمكن جمعها ببساطة معاً، منتجة خرائط مدمجة مع فقدان ضئيل للمعلومات.
ماذا يعني هذا للروبوتات اليومية
بعبارات بسيطة، يُظهر هذا العمل أن الروبوتات لا تحتاج إلى الاختيار بين رياضيات بطيئة لكنها موثوقة وشبكات عصبية سريعة لكنها غامضة عند بناء خرائط العالم. باستخدام متجهات عالية الأبعاد مستوحاة من الدماغ، يحافظ VSA-OGM على البنية الاحتمالية الواضحة للطرق الكلاسيكية بينما يصل إلى السرعة والكفاءة اللازمة للعمل في الزمن الحقيقي على أجهزة محدودة. لا تزال هناك تحديات — مثل التعامل مع بيانات غير متوازنة للغاية وبيئات مكتظة جداً — لكن النهج يشير إلى روبوتات مستقبلية قادرة على فهم محيطها بأمان وموثوقية، حتى عند التشغيل على حواسيب داخلية متواضعة.
الاستشهاد: Snyder, S., Capodieci, A., Gorsich, D. et al. Brain Inspired Probabilistic Occupancy Grid Mapping with Vector Symbolic Architectures. npj Unconv. Comput. 3, 13 (2026). https://doi.org/10.1038/s44335-026-00052-w
الكلمات المفتاحية: تخطيط شبكة الشغل, الروبوتات الذاتية, البنى الرمزية المتجهية, التخطيط الاحتمالي, استشعار LiDAR