Clear Sky Science · ar
أدلة سلوكية على التنفيذ الهرمي للحركات المتسلسلة
كيف يحول دماغنا الحركات البسيطة إلى أفعال سلسة
المهام اليومية مثل الكتابة على لوحة مفاتيح، عزف سلم بيانو، أو الوصول إلى عدة عناصر على طاولة تبدو سهلة وبديهية. لكن في الخلفية، يجب على دماغك ربط العديد من الحركات الصغيرة لتكوين أفعال منسجمة وسلسة. تسأل هذه الدراسة سؤالاً يبدو بسيطاً: هل يخطط الدماغ دوماً لسلاسل الأحركات كحركة طويلة واحدة، أم أنه يبنيها خطوة بخطوة مستخدماً تسلسلاً هرمياً مخفياً من البنى الأصغر؟
الوصول إلى أهداف كبيرة على الطاولة
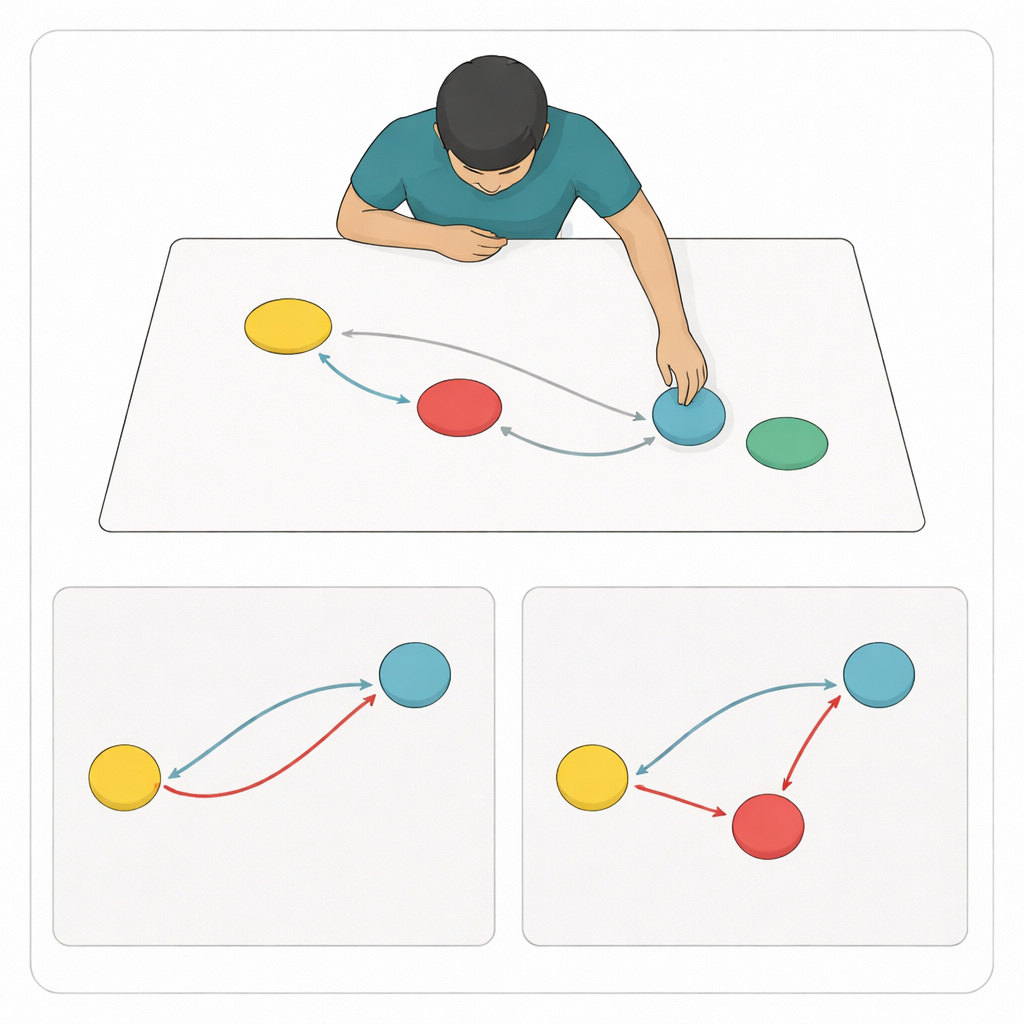
لاستكشاف ذلك، صمّم الباحثون لعبة على الطاولة تشبه «وصل النقاط» باليد. جلس عشرون متطوعاً عند طاولة عليها دوائر كبيرة ملونة مطبوعة على السطح. كانت دائرة البداية قريبة من الجسم، مع دوائر أخرى موضوعة إلى اليسار واليمين وفوقها. في كل تجربة، سمع المشاركون صوتاً وكان عليهم تحريك طرف السبابة من دائرة البداية عبر تسلسل قصير من الأهداف والعودة مرة أخرى، بأسرع ما يمكن ولكن دون دقة مفرطة: كان يكفي لوصل طرف السبابة أي مكان داخل كل دائرة. هذا الإعداد منخفض الدقة شجّع الناس على الحركة بسرعة وبسلاسة، مما سمح لمساراتهم بالانحناء والاندماج بين الأهداف بدلاً من التوقف الحاد عند كل منها.
قراءة الخطط الخفية من انحناءات اليد
بدلاً من توقيت المدة التي استغرقها الأشخاص أو عدد الأخطاء، ركز الفريق على الشكل الدقيق لكل مسار لطرف السبابة. نظروا في ميزتين أساسيتين. أولاً، «الانحناء الوسطي»: مدى انجراف المسار إلى اتجاه الهدف التالي قبل الوصول إليه فعلياً. ثانياً، «الالتفاف حول الهدف»: مدى حدة أو سلاسة انحناء المسار عند مروره بالقرب من هدف وتغير اتجاهه. تكشف هذه الأنماط معاً ما إذا كانت الحركة نحو هدف ما تأخذ الهدف التالي في الحسبان بالفعل — تأثير يسمى «التشارك الحركي»، مماثل لكيفية تشكيل فمك للأصوات القادمة أثناء الكلام. قارن العلماء هذه المنحنيات المقاسة بالمسارات التي تنتجها نماذجان حاسوبيان لتخطيط الحركة، كلاهما مستند إلى نظريات راسخة في التحكم الأمثل لكن يختلفان في البنية الداخلية.
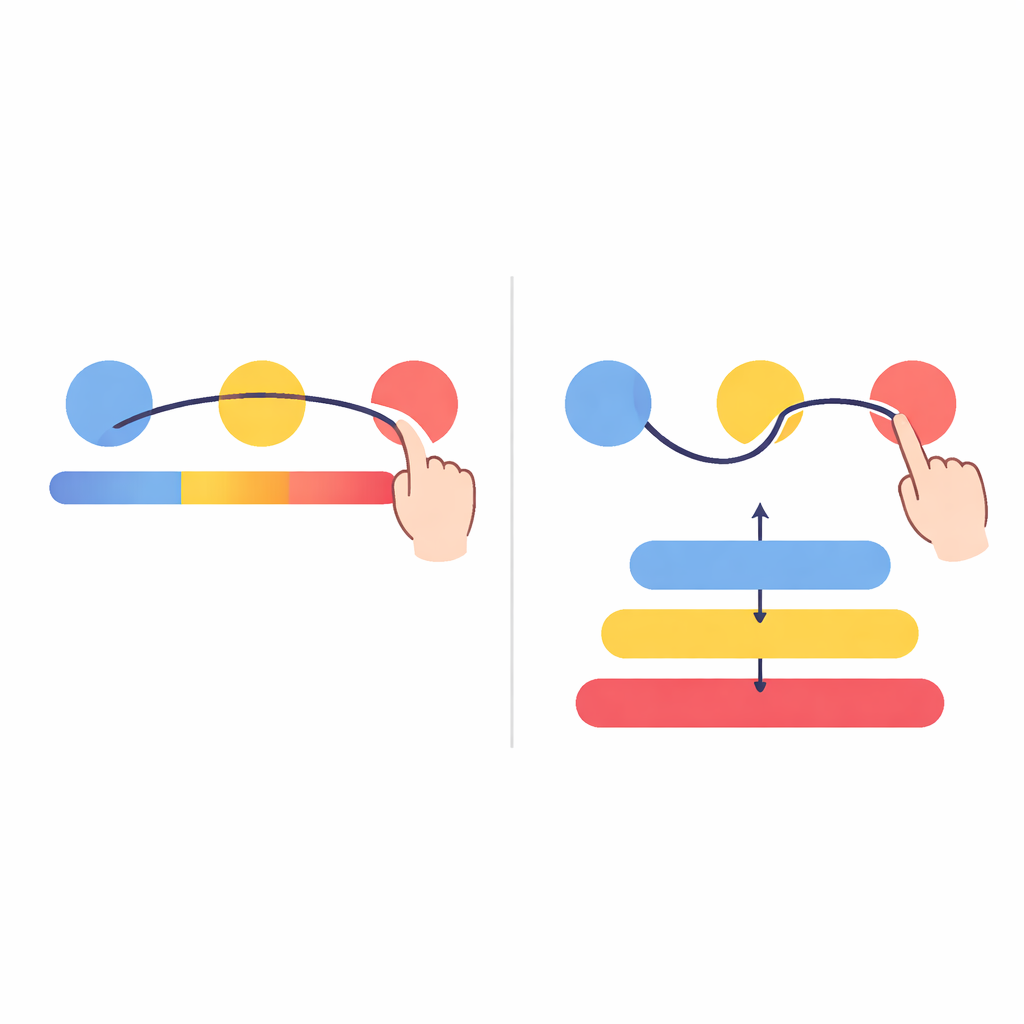
خطط مسطحة مقابل خطط مكونة من طبقات
في النموذج «المسطح»، يُتخيَّل أن الدماغ يخطط للتسلسل الكامل المكوّن من ثلاثة أهداف كمسار موحّد واحد قبل بدء اليد في الحركة. هذا يشبه إيماءة محفوظة بالكامل أو «كتلة» تنفّذ دفعة واحدة. في هذه الحالة، يرتبط الانحناء الوسطي والالتفاف حول الأهداف ارتباطاً وثيقاً: بمجرد أن يقرر المخطط مدى التوجيه نحو الهدف الأول، يثبت إلى حد كبير كيف ستبدو المنحنيات عبر التسلسل كله. بالمقابل، يضيف النموذج «الهرمي» طبقة وسيطة بسيطة تدمج قطعاً أصغر — مثل حركة مكوّنة من هدفين تليها عودة إلى هدف واحد — أثناء التنفيذ. نظام ديناميكي منفصل يحدد متى يتم التحول من شبه-حركة إلى التالية، مما يسمح بضبط الشكل حول كل هدف بشكل أكثر استقلالية مع الحفاظ على انسيابية الحركة العامة.
سلوك يشير إلى هيكل هرمي
عندما نفّذ الباحثون الكثير من المحاكاة، وجدوا أن النموذج المسطح لم يستطع ببساطة توليد بعض تراكيب الانحناء الوسطي والالتفاف التي أنتجها المشاركون البشريون بطبيعتها. على وجه الخصوص، أظهر الناس غالباً انحناءً قوياً نحو الهدف الثاني في الجزء الأول من الحركة، ومع ذلك أجروا انعطافاً حاداً أو منحنى مختلف الشكل حول ذلك الهدف الثاني — أنماط لم يستطع المخطط المسطح محاكاتها. أما النموذج الهرمي، فكان قادراً على إعادة إنشاء هذه السلوكيات المختلطة من خلال ربط «شبه-حركات» منفصلة ديناميكياً عند الأهداف الوسيطة. بمقارنة البيانات الحقيقية مع كلا النموذجين، استنتج المؤلفون أن نحو نصف تسلسلات الحركة المسجلة بوضوح تتطلب تفسيراً هرمياً، بينما كانت الأخرى متوافقة مع التخطيط المسطح، ما يشير إلى أن الناس يبدلون الاستراتيجيات بمرونة اعتماداً على التسلسل.
ما يعنيه هذا للمهارة اليومية
تشير النتائج إلى أنه حتى بدون ممارسة طويلة أو روتين مدرّب تدريباً عالياً، يعتمد دماغنا غالباً على خطط متعددة الطبقات عند ربط حركات الوصول البسيطة. بدلاً من ضغط التسلسل دوماً إلى كتلة واحدة جامدة، يبدو أن نظام الحركة يحتفظ بقطع حركة قابلة لإعادة الاستخدام ويربطها في الزمن الحقيقي. مع التدريب، قد تنهار مثل هذه السلاسل تدريجياً إلى أفعال أكثر تسطيحاً ومجزأة تماماً، ما يساعد على تفسير كيف تصبح المهارات سريعة وذاتية إلى هذا الحد. يوفر هذا العمل نافذة جديدة قائمة على الهندسة لفهم كيفية تنظيم الدماغ للحركة، والتي قد توجه البحوث المستقبلية في تعلم الحركة، وإعادة التأهيل، وتصميم روبوتات تتحرك برشاقة متكيفة مماثلة.
الاستشهاد: Cuevas Rivera, D., Kiebel, S.J. Behavioral evidence for the hierarchical execution of sequential movements. Commun Psychol 4, 52 (2026). https://doi.org/10.1038/s44271-026-00436-5
الكلمات المفتاحية: ضبط الحركة, تخطيط الحركة, تجزئة الحركة, السلوك الهرمي, الوصول التسلسلي