Clear Sky Science · ar
القبض عبر الشقوق: الضربة الديناميكية تُمكّن التثبيت الروبوتي القابل للتنبؤ على جليد المياه العذبة
التسلق حيث الثقل يكاد يكون منعدمًا
تخيل محاولة تسلق جرف جليدي حيث تكون الجاذبية ضعيفة لدرجة أن وزنك لا يكفي لمساعدة حذائك على الثبات. هذا هو التحدي الذي ستواجهه الروبوتات المستقبلية المرسلة إلى الأقمار الجليدية مثل إنسيلادوس التابعة لزحل، حيث يأمل العلماء في البحث عن علامات حياة داخل فتحات وكهوف جليدية عميقة. تصف هذه الورقة طريقة جديدة لالتصاق الروبوتات بالجليد باستخدام ضربات سريعة شبيهة بالمطرقة وقرص ثابت، مستلهمة من محاور التسلق الجليدية لدى البشر. النتيجة نظام تثبيت خفيف الوزن يستخدم قوة وطاقة أقل بكثير من براغي الجليد الحالية أو المعاول المسخنة، مما قد يجعل العوالم الجليدية التي كانت بعيدة المنال أكثر قابلية للوصول.

لماذا من الصعب التمسك بالجليد
على الأرض، يستطيع المتسلق دفع كامل وزنه في مسمار جليدي أو فأس ليعض السطح. على إنسيلادوس، تبلغ الجاذبية حوالي واحد بالمئة فقط من جاذبية الأرض، لذا لا يمكن للروبوت الاعتماد على وزنه لدفع الأدوات إلى داخل الجليد. الخيارات الحالية كلها لها عيوب كبيرة. براغي الجليد تتطلب قوى دفع كبيرة لتبدأ بالالتقاط بالسطح — لدرجة أن روبوتًا على إنسيلادوس قد يحتاج إلى أن يزن بحجم مركبة روفر كبيرة على المريخ لاستخدامها بفعالية. المعاول الحرارية المسخنة يمكنها أن تذيب نفسها لتثبت بمجهود دفع قليل جدًا، لكنها تستهلك كميات هائلة من الطاقة في كل استخدام، وهو قيد جاد على المركبات العاملة بعيدًا عن الشمس. في الوقت نفسه، تعتمد العديد من روبوتات التسلق الحديثة على ملامح صخرية خشنة أو الشفط أو لواصق خاصة، وكلها تواجه صعوبة مع الأشكال الملساء المموجة الموجودة على جليد الأنهار الجليدية الطبيعي.
اقتباس خدعة من متسلقي الجليد البشريين
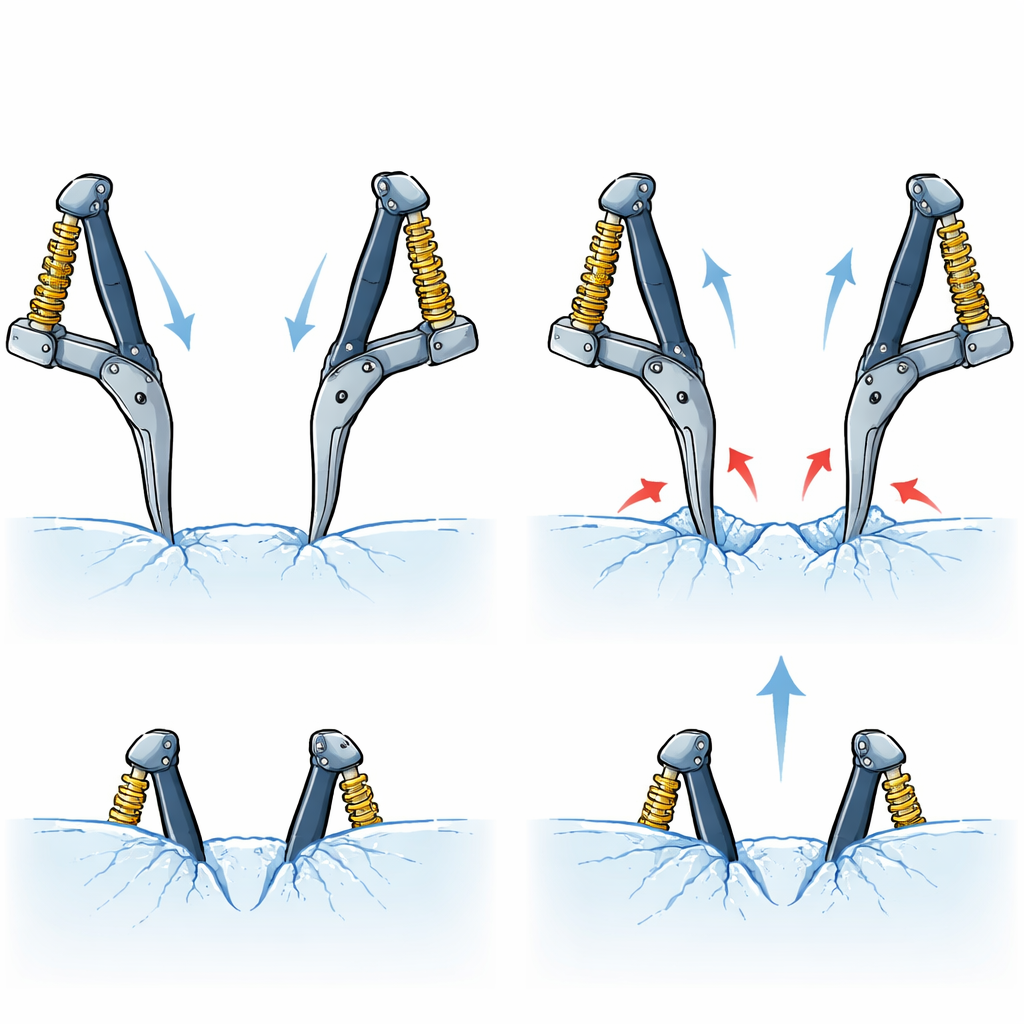
يقترح المؤلفون استراتيجية مختلفة: بدلاً من التكيف مع سطح الجليد، اصنع نقاط تمسّكك بنفسك. تستخدم آلتهم محوريْن صغيريْن للفأس موضوعة على ملقط مدمج. أولاً، تُلف النوابض داخل الذراعين، مخزنة كمية معتدلة من الطاقة الميكانيكية. عند التحرير، تتحرك المحاور مثل مطارق صغيرة وتضرب الجليد، مقشرةً حفرًا صغيرة. بعد ذلك، تضغط نفس الآلية المحاور تجاه بعضها بحيث تُدخل أطرافها في الانبعاجات الجديدة. هذه العملية ذات الخطوتين — الصدمة ثم القبض — تحول بقعة ناعمة من الجليد إلى شيء يمكن للروبوت الإمساك به، ويمكن عكسها بسهولة حتى يتمكن الروبوت من اتخاذ "خطوة" أخرى. يَعمل كامل الدورة بمحرك واحد يشحن النوابض ويشد القبضة.
اختبار الفيزياء وراء التماسك
للتأكد من أن هذا النهج سيعمل بشكل موثوق، بنى الفريق نماذج رياضية لعمق عضات أطراف الفأس ومقدار الارتداد المحتمل بعد الصدمة. ثم اختبروا محاور مفردة تتأرجح مثل البندول وتصطدم بكتل من جليد المياه العذبة المبردة إلى درجات حرارة نموذجية للأنهار الجليدية. بمقارنة النظرية والتجربة، وجدوا أن نماذجهم قادرة على التنبؤ بعمق الحفرة وتقدير طاقة الارتداد عند ارتداد الفأس. باستخدام هذه النتائج، حسبوا مدى قوة الضغط التي يجب أن يمارسها الروبوت على الملقط قبل التأرجح، حتى تبقى المحاور في حفرها الجديدة بدلاً من الارتداد للخارج. لطاقة النابض المختارة لديهم، تنبأت النماذج بأن دفعًا بنحو 16 نيوتن — تقريبًا وزن عدة لترات من الماء على الأرض — سيؤدي إلى نجاح شبه مضمون.
من منضدة المختبر إلى جدار النهر الجليدي
بوجود النماذج، اختبر الباحثون الملقط ذي المحورين الكامل. في المختبر، أكدوا أن الصدمات المخزنة بطاقة نابض مقدارها 8 جول يمكن أن تخلق حفرًا عميقة بما يكفي بينما تتطلب دفعًا ابتدائيًا أقل بكثير من براغي الجليد وطاقة أقل بكثير من المثبتات الحرارية. ثم قاسوا مدى قوة القبضة النهائية بسحب الجهاز عموديًا عن الجليد. من خلال تعديل مدى إحكام ضغط المحاور تجاه بعضها، اكتشفوا طريقتين قد يفشل بهما التماسك: عند ضغط منخفض، تنزلق الأطراف خارج الحفر؛ وعند ضغط مرتفع جدًا، تنكسر شرفات الجليد نفسها. بين هذين الحدين كان هناك نقطة مثالية حيث يمكن للملقط أن يدعم أكثر من ضعف وزنه. أظهرت اختبارات ميدانية على نهر جليدي فرنسي أن الجهاز يمكنه التثبيت على جليد طبيعي حاد، وثلج متماسك، وحتى جذوع الأشجار والصخور والتربة المضغوطة بقوة، مؤكدًا أن طريقة الصدمة والقبض تعمل خارج المختبر.
ماذا يعني هذا للمستكشفين المستقبليين
تظهر الدراسة أن كسر الجليد وقرصه يمكن أن يكون وسيلة فعالة للغاية للروبوتات للتسلق والبقاء ثابتة في بيئات قاسية منخفضة الجاذبية. من خلال استغلال حقيقة أن تشققات الجليد تستهلك طاقة أقل بكثير من إذابته، يشكل الملقط ذي المحورين مراسي قوية وقابلة للعكس باستخدام قوى متواضعة وقليل من الجول لكل خطوة. بالنسبة للبعثات إلى إنسيلادوس أو عوالم جليدية أخرى، يمكن لمثل هذا النظام أن يمكّن روبوتات صغيرة محدودة الطاقة من النزول بأمان إلى الفتحات أو التعليق على جدران الهاويات أثناء أخذ عينات من مواد قد تكشف ما إذا كانت هناك حياة خارج الأرض. يمكن أن تساعد الفكرة نفسها أيضًا روبوتات على الأرض في استكشاف الأنهار الجليدية، والكهوف الجليدية، والواجهات الصخرية الهشة التي تكون خطيرة أو بعيدة المنال للمتسلّقين البشر.
الاستشهاد: Galassi, A., Trebi-Ollennu, A., Papadopoulos, P. et al. Fracture-based grasping: dynamic impact enables predictable robotic anchoring to freshwater ice. npj Robot 4, 22 (2026). https://doi.org/10.1038/s44182-026-00085-0
الكلمات المفتاحية: تسلق جليد روبوتي, استكشاف كوكبي, ملاقط روبوتية, تثبيت عبر تكسير الجليد, مهام إنسيلادوس