Clear Sky Science · ar
تخطيط مسارات متعددة العوامل يسمح بمناورات ديناميكية عدوانية
روبوتات يمكنها الرقص بين حركة المرور
تخيل عشرات الروبوتات الطائرة والبرية تتنقل في مستودع بسرعة ودون أن تصطدم ببعضها، وتنجز مهامها أسرع مما يستطيع السائقون البشر فعله. تصف هذه الورقة طريقة جديدة لتنسيق «حركة المرور» الروبوتية بحيث يمكن لعدد كبير من الآلات أن يتحرك بعنف وسرعة في مساحات ضيقة مع البقاء آمنة. تكمن أهمية العمل في أن نفس الأفكار قد تشغل أساطيل الروبوتات في المصانع والمخازن وخدمات التوصيل التي تحتاج إلى العمل دون انقطاع في عالمنا اليومي.
لماذا من الصعب جمع روبوتات كثيرة
تنسيق حشد من الروبوتات أصعب بكثير من توجيه روبوت واحد. يجب على كل روبوت الوصول من نقطة البداية إلى الهدف دون وقوع تصادم أو عرقلة الآخرين أو الوقوع في حلقات لانهائية. الطرق الحالية تميل إلى التمركز عند طرفي نقيض. تعالج بعض الأساليب الروبوتات كقطع على شبكة، مما يجعل التخطيط لمئات منها سريعًا ومرتبًا من الناحية الرياضية—لكن المسارات الناتجة غالبًا ما تتجاهل كيفية تحرّك الآلات الحقيقية أو تسارعها أو دورانها. طرق أخرى تحاكي الحركة الفيزيائية الكاملة وتنتج مسارات سلسة وجميلة، لكنها تصبح بطيئة للغاية أو غير موثوقة عندما يزيد عدد الروبوتات عن عدد قليل.
طريق وسط: التخطيط «الخرساني»
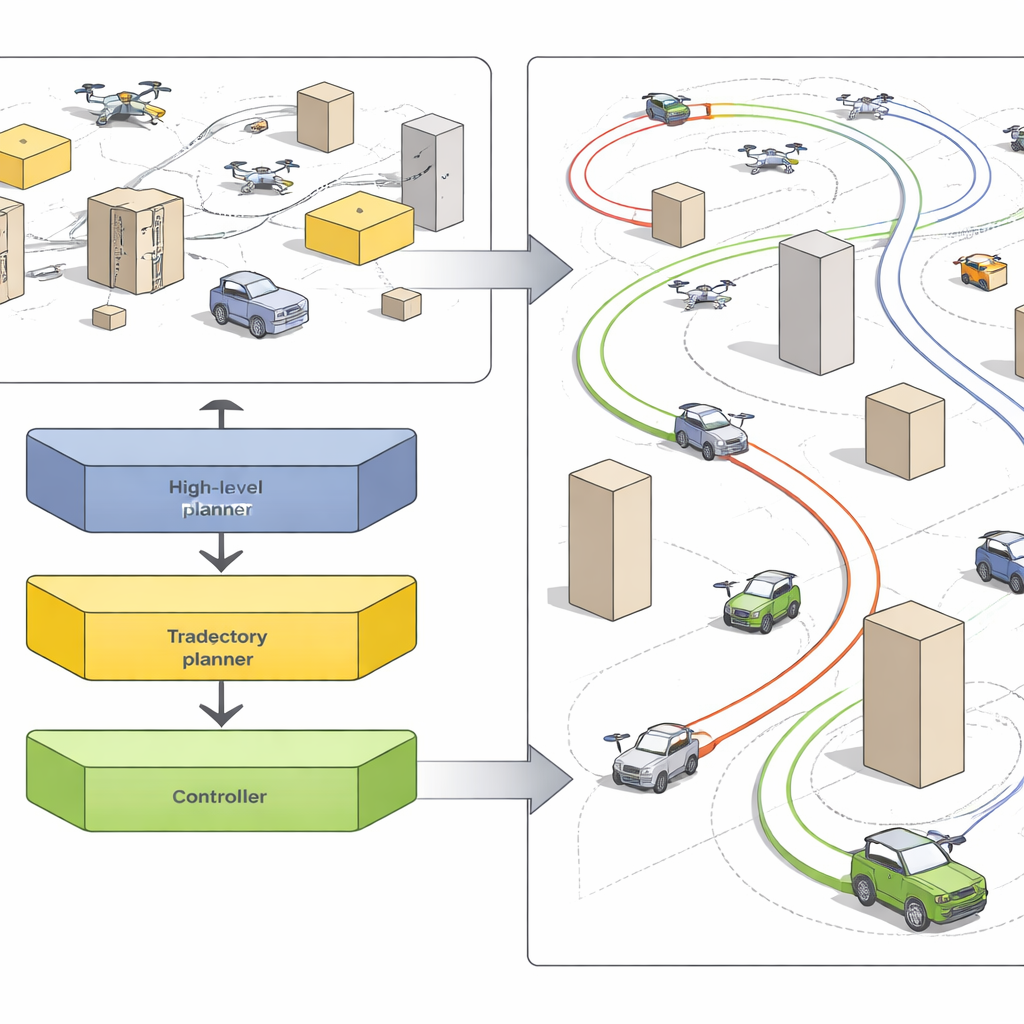
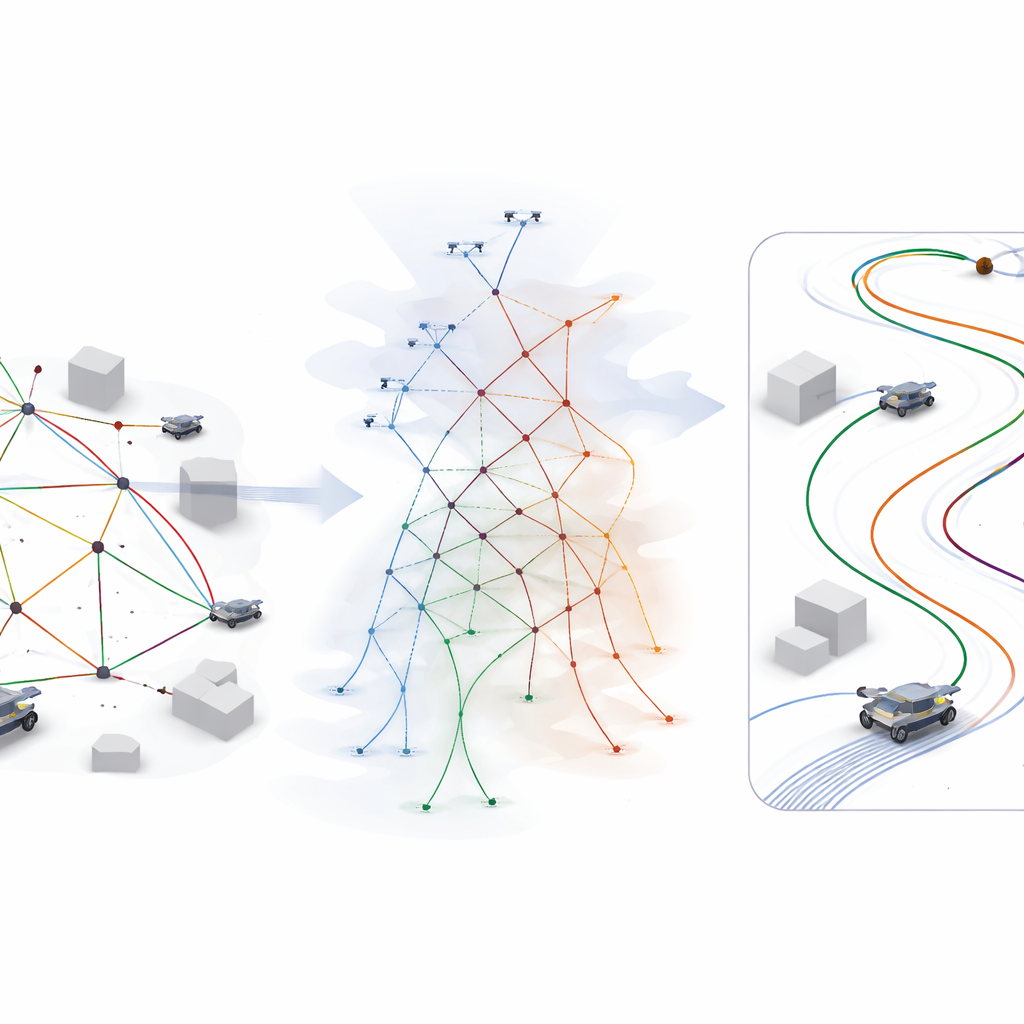
يقترح المؤلفون استراتيجية هجينة يسمونها «تخطيط مسارات متعددة العوامل الخرسانية». الفكرة هي مزج البنية الواضحة لتخطيط الشبكات مع صورة واقعية عن كيفية تحرك الروبوتات فعليًا. بدلًا من العمل في شبكة مجردة أو في فيزياء مستمرة بالكامل، يستخدم النظام وصفًا متعدد الطبقات للحركة. يبحث مخطط مركزي عبر مجموعة متقطعة من الحركات الممكنة لكل الروبوتات معًا، لكن كل حركة تُثري بتنبؤات حول المدة المتوقعة، وكيف قد ينحرف الروبوت عن مساره المقصود، ومدى قربه الآمن من الآخرين. هذه التنبؤات تأتي من نماذج مدعومة بالبيانات تدُرِّبت على تجارب روبوتية حقيقية، فيُصبح لدى المخطط «معرفة» بكيفية تصرف أسطوله في الواقع.
من مخططات خشنة إلى حركة دقيقة
بعد أن ينتج المخطط المترابط تسلسلات نقاط طريق آمنة وخالية من التعارض لكل روبوت، يتدخل الإطار بدقة أكبر. يحول وحدة ثانية كل مسار خشن إلى مسار كثيف وسلس يحترم حدود الدفع والتوجيه والعوامل الفيزيائية الأخرى. للقيام بذلك بسرعة، استخدم المؤلفون أولًا تحسينًا عدديًا كثيفًا خارج زمن التشغيل لتوليد العديد من أمثلة الحركة القريبة من الزمن الأمثل، ثم دربوا شبكات عصبية قائمة على المحولات لتقليد تلك الأمثلة. في وقت التشغيل، يمكن لهذه الشبكات توليد مسارات مرجعية عالية الجودة في أقل من جزء من الثانية. طبقة ثالثة، متحكم توقع النموذج المزوَّد بمرشح أمان، يضبط الأوامر باستمرار لمتابعة هذه المراجع ويستخدم الاستشعار المحلي لتفادي أي مفاجآت، مثل عقبة متجولة أو خطأ طفيف في التتبع.
اختبار أربعين روبوتًا
عرض الفريق نظامهم بأسطول مختلط من 20 طائرة رباعية المراوح و8 روبوتات أرضية و12 روبوتًا تعمل كعقبات متحركة، كلها تعمل معًا داخل حلبة داخلية بحجم غرفة. في سلسلة من التجارب، تسابقت أسراب الطائرات عبر مساحات محصورة بسرعات قصوى تزيد عن خمسة أمتار في الثانية بينما كانت تتفادى بعضها في نوع من الباليه ثلاثي الأبعاد. في تجربة أخرى، عبرت الروبوتات الأرضية منطقة مزدحمة بعقبات متحركة عشوائيًا مرارًا وتكرارًا، وأكملت مهامًا أكثر، مع توقفات أقل وبدون اصطدامات، مقارنة بالطرق المنافسة. كانت التجارب الأكثر تطلبًا تتضمن جميع الروبوتات الأربعين تنفذ بعثات متعددة على التوالي، مع إعادة تخطيط مستمرة للمسارات عند الطلب دون اختناقات أو حوادث.
دلائل على أنظمة توصيل ومخازن مستقبلية
لإظهار كيف يمكن أن يترجم هذا إلى مهام العالم الحقيقي، نفذ المؤلفون عمليات توصيل «المرحلة الأخيرة» ومحاكاة عمليات مخازن. في سيناريو التوصيل، حملت الروبوتات الأرضية الطائرات إلى «ضفة نهر»، حيث أقلعت الطائرات، طارت إلى نقاط تسليم متناثرة، عادت إلى قواعدها المتنقلة ثم رُفعت إلى منطقة البداية—كل ذلك مع تجنب العقبات المتحركة. في محاكاة المخزن، نقلت فرق من الطائرات مرارًا طرودًا افتراضية بين الرفوف ومناطق التسليم، محافظة على حركة كثيفة ومرنة ومعدل إنتاجية عالٍ. لم تتطلب هذه دراسات الحالة سوى تعديل طفيف للإطار، مما يبرز قابليته للتكيف مع منصات ومهام جديدة.
ماذا يعني هذا للمستقبل
بعبارات بسيطة، يظهر هذا العمل أنه من الممكن أن تتحرك فرق كبيرة من الروبوتات بجرأة وبأمان في مساحات ضيقة ومتغيرة عن طريق الجمع بعناية بين تخطيط عالي المستوى السريع ونماذج حركة واقعية وفحوصات أمان أخيرة. يحول النهج «الخرساني» الخطط المجردة إلى حركات يمكن للآلات الحقيقية تنفيذها بسرعة، مع الاستمرار في تقديم ضمانات ضد التصادمات والاختناقات في العديد من الحالات العملية. وعلى الرغم من أن البيئات الفوضوية للغاية والمساحات المجهولة تمامًا تظل تحديًا، يشير الإطار إلى مستقبل يمكن أن تتشارك فيه أساطيل الطائرات ومشغلو المخازن والعمال الروبوتيون الآخرون بيئات مزدحمة دون إشراف بشري دائم.
الاستشهاد: Okumura, K., Yang, G., Gao, Z. et al. Concrete multi-agent path planning enabling kinodynamically aggressive maneuvers. npj Robot 4, 20 (2026). https://doi.org/10.1038/s44182-026-00083-2
الكلمات المفتاحية: تنسيق روبوتات متعددة, تخطيط المسارات, قطعان الروبوتات, أتمتة المخازن, توصيل الطائرات بدون طيار