Clear Sky Science · ar
كل العيون، بلا مقاييس حركية: تعلم وضعية الطيران من الرؤية وحدها
الرؤية كما تقوم بها الحشرة
تعتمد الروبوتات الطائرة الصغيرة عادةً على حساسات حركة دقيقة لتبقي نفسها منتصبة، شبيهة إلى حد ما بالأذن الداخلية للآلات. لكن الحشرات تؤدي طيرانًا رشيقًا بأجهزة أبسط بكثير، معتمدة بدرجة كبيرة على ما تراه. تُظهر هذه الدراسة أن طائرة درون يمكنها أن تفعل شيئًا مشابهًا: تطير بثبات باستخدام نوع خاص من الكاميرات ودماغ صناعي صغير، دون الحساسات الحركية التقليدية. قد يجعل هذا التحول الطائرات المستقبلية بحجم راحة اليد أو بحجم الحشرات أخف وزنًا وأرخص وأقوى من حيث الموثوقية.
لماذا الاستغناء عن الحساسات المعتادة؟
يتولى التحكم في الوضعية—الحفاظ على ميل الطائرة بالنسبة للجاذبية—وحدة داخلية تقيس التسارع والدوران. تعمل هذه الحساسات القَصَدية جيدًا، لكنها تضيف وزنًا وتستهلك طاقة وقد تكون نقطة فشل واحدة. بالمقابل، لا تمتلك كثير من الحشرات حسّاسًا مخصصًا للجاذبية، بل تستخلص دلائل عن ميولها من الطريقة التي يتحرك بها المشهد عبر أعينها. إذا تمكنت الروبوتات من تقليد هذه الحيلة، فقد لا تحتاج الطائرات الصغيرة جدًا إلا إلى الرؤية للتمييز والموازنة معًا، مما يبسط التصميم ويسهّل تقليص حجمها إلى مقاييس شبيهة بالحشرات.
كاميرا ترى التغير فقط
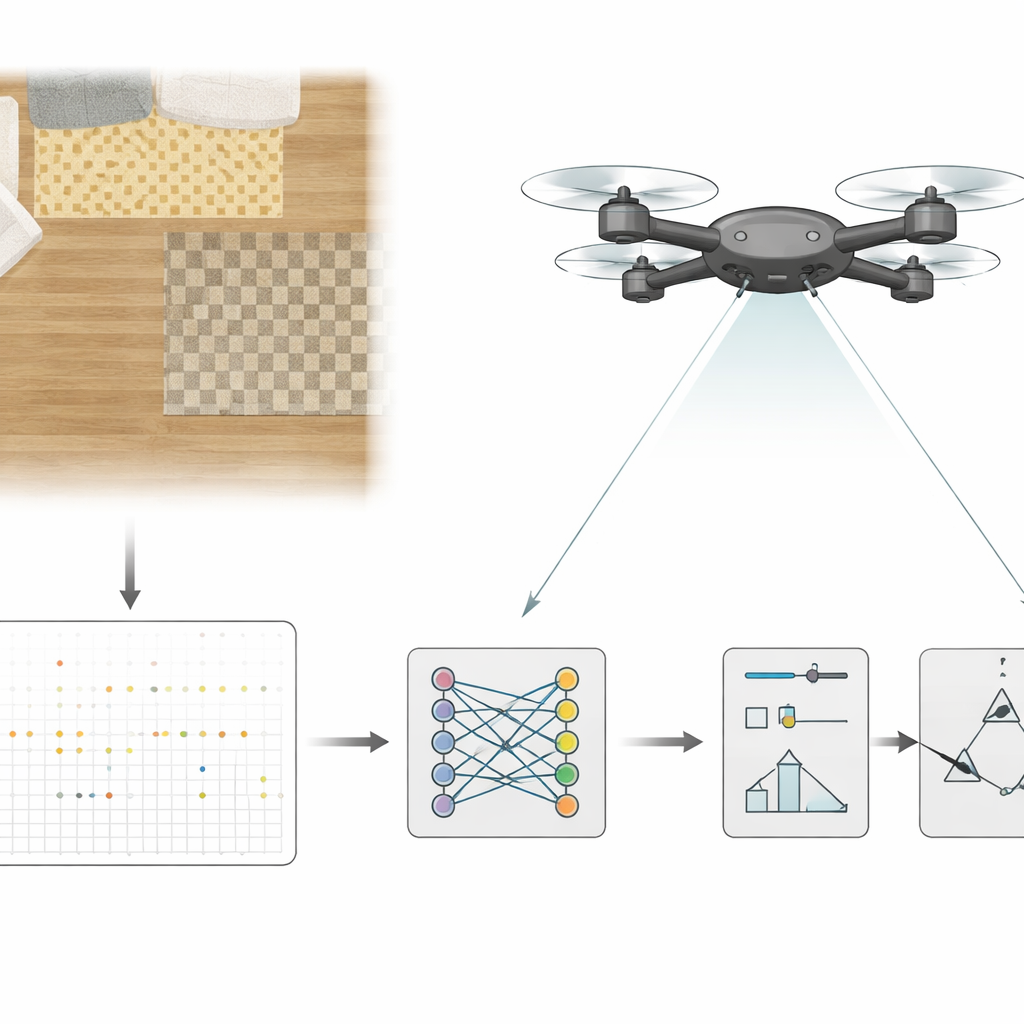
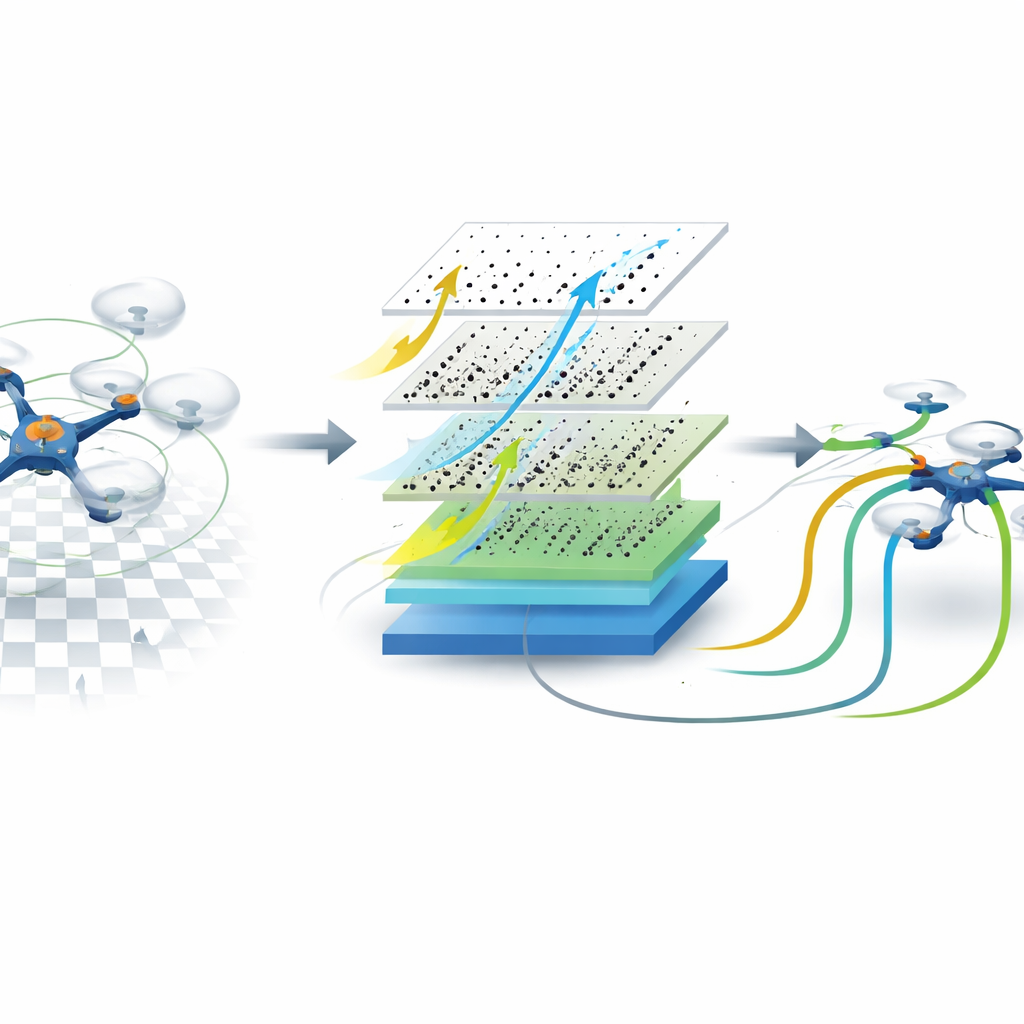
بدلاً من الكاميرا الفيديو التقليدية، استخدم الباحثون كاميرا قائمة على الأحداث موجهة إلى الأسفل من الطائرة. بدلًا من إرسال صور كاملة بفواصل زمنية ثابتة، يسجل هذا الحساس تغيّرات طفيفة في مستوى السطوع عند كل بكسل، وبسرعة عالية للغاية. تُجمع تيارات الأحداث في شرائح زمنية قصيرة، كل منها يغطي خمسة من آلاف الثانية فقط، وتُغذى هذه الشرائح إلى شبكة عصبية تلافيفية متكررة صغيرة تعمل على شريحة رسومية محمولة على الطائرة. مع مرور الوقت تتعلم الشبكة تحويل أنماط التغير البصري إلى تقديرات لميل الطائرة وسرعة دورانها، مُحيلةً عمليًا وحدة الحركة التقليدية في حلقة التحكم.
تدريب طائرة على التوازن بالرؤية وحدها
لتعليم هذا الدماغ الصناعي، طار الفريق أولاً بطائرتهم الرباعية داخل ساحة داخلية بينما كانت ما تزال تستخدم مجموعة الحساسات التقليدية. خلال تلك الرحلات سجلوا تدفق الأحداث من الكاميرا مع قيم الميل والدوران المقدرة بواسطة وحدة التحكم الاعتيادية. ثم دربوا الشبكة بإشراف لتعيد إنتاج تلك القيم من البيانات البصرية وحدها. في الاختبارات اللاحقة، عكست الأدوار: طارت الطائرة مع تقديرات الشبكة تُغلق حلقة التحكم، بينما خدمت قياسات مستقلة من نظام التقاط الحركة أو قراءات على متن الطائرة فقط لقياس مدى الأداء. حافظ النظام على تحويم الطائرة وتتبع مسارات بأوامر الطيار لدقائق متتالية، مع أخطاء ميل في معظم الأحيان ضمن عدة درجات وأخطاء دوران ضمن حدود متواضعة، كافية للطيران المستقر.
نظرة داخل المهارة البصرية المتعلمة
استقصى الباحثون ما الذي يجعل هذا التحكم القائم على الرؤية وحدها يعمل بأفضل شكل. قارنوا تصميمات شبكات مختلفة، وأضافوا أو أزاحوا مدخلات إضافية مثل سرعات المحركات أو إشارات الجايروسكوب، وغيّروا مقدار الحقل البصري المستخدم من الكاميرا. كانت الشبكات ذات الذاكرة—القادرة على دمج المعلومات البصرية عبر الزمن—حاسمة لمتابعة الدورانات السريعة بدقة، بينما عانت النسخ التي بلا ذاكرة. أعطى الحقل البصري الواسع، الذي يكشف دلائل تشبه الأفق البعيد عند حواف الصورة، أدنى أخطاء خام في المشاهد المألوفة. ومن المدهش أنه عندما أجبروا الشبكة على النظر فقط إلى الجزء المركزي من الصورة، حيث تختفي مثل هذه الدلائل الثابتة، أصبحت تعتمد أكثر على أنماط الحركة بدلاً من مظهر المشهد. رغم أن هذا قلل الدقة المطلقة، فقد حسّن كيفية تكيف النظام بسلاسة عندما نُقل إلى بيئات مختلفة تمامًا، مما يشير إلى أن إحساسًا داخليًا بالحركة كان يتعلم.
نحو روبوتات طائرة صغيرة تضع الرؤية أولاً
بصورة عامة، تُظهر النتائج أن طائرة يمكنها أن تحافظ على استقامتها وقابليتها للتحكم باستخدام ما تراه فقط، دون حسّاس قصدي في حلقة التحكم. بمزج كاميرا قائمة على الأحداث مع شبكة عصبية مدمجة، يصل النظام إلى سرعة واستجابة مطلوبة للتحكم في الزمن الحقيقي مع تقليل وزن وتعقيد الأجهزة. للقراء العامين، الرسالة الأساسية هي أن أسرابًا مستقبلية من روبوتات طائرة صغيرة شبيهة بالحشرات قد تتوازن وتتنقل باستخدام عين ذكية واحدة فقط، كما تفعل الحشرات، ما يفتح الباب لأجهزة أخف وزنًا وأكثر كفاءة في استهلاك الطاقة وقادرة على استكشاف مساحات مزدحمة وغير متوقعة بأمان.
الاستشهاد: Hagenaars, J.J., Stroobants, S., Bohté, S.M. et al. All eyes, no IMU: learning flight attitude from vision alone. npj Robot 4, 21 (2026). https://doi.org/10.1038/s44182-026-00081-4
الكلمات المفتاحية: التحكم في الطيران القائم على الرؤية, طائرات بدون طيار بكاميرات الحدث, الروبوتات المستوحاة من الأحياء, متحكمات الشبكات العصبية, طائرات بدون طيار بحجم الحشرات