Clear Sky Science · ar
استراتيجية تعويض سلوكي تكيفي مستوحاة من الحشرات ضد عجز الحاسة الشمية لتحديد مصدر الرائحة في الروبوتات
لماذا فقدان مستشعر لا يعني فقدان الأثر
تخيل روبوت بحث وإنقاذ يحاول اكتشاف تسرب غاز أو إنقاذ ناجٍ محتجز في مبنى منهار—ثم يتعطل واحد من المستشعرات الأساسية. غالباً ما تفشل الروبوتات الحالية إلى حد كبير في ظل هذا النوع من الضرر. تستلهم هذه الدراسة نموذجاً مفاجئاً للخبرة في الملاحة الحسية بالرائحة: فراشة الحرير الذكرية، لتوضح كيف تستمر الحيوانات في تعقب مصدر رائحة حتى بعد فقدان نصف «أنفها» وكيف يمكن تطبيق هذه الاستراتيجية على روبوتات رباعية الأرجل.
ملازم صغير بحاسة شم قوية
تستخدم العديد من الحيوانات — من الحشرات إلى الكلاب — إشارات كيميائية جوية للعثور على الطعام أو الشريك أو ملجأ آمن. تكون الروائح مفيدة بشكل خاص عندما تكون الرؤية محجوبة بالظلام أو الدخان أو الأنقاض. لكن أعمدة الرائحة في الواقع فوضوية: يتحول اتجاه الريح، تبني المباني والأشجار مجرى الهواء، ولا تكون أقوى رائحة دائماً مباشرة باتجاه مصدرها. تفترض معظم الروبوتات الصيد للرائحة أن جميع مستشعراتها الشمية تعمل بشكل مثالي وأن اتجاهات الريح والرائحة متزامنة بدقة. في البرية، لا ينطبق أي من هذين الافتراضين. توفر فراشة الحرير (Bombyx mori) مثالاً طبيعياً مضاداً: يستطيع الذكور تحديد الإناث اللواتي يفرزن فيرومونات جنسية حتى في هواء مضطرب، والمثير أن ذلك يحدث حتى عند إزالة إحدى قرني الاستشعار—أعضائهم الشمية الرئيسية.
كيف تتعامل العثة بعد فقدان قرن الاستشعار
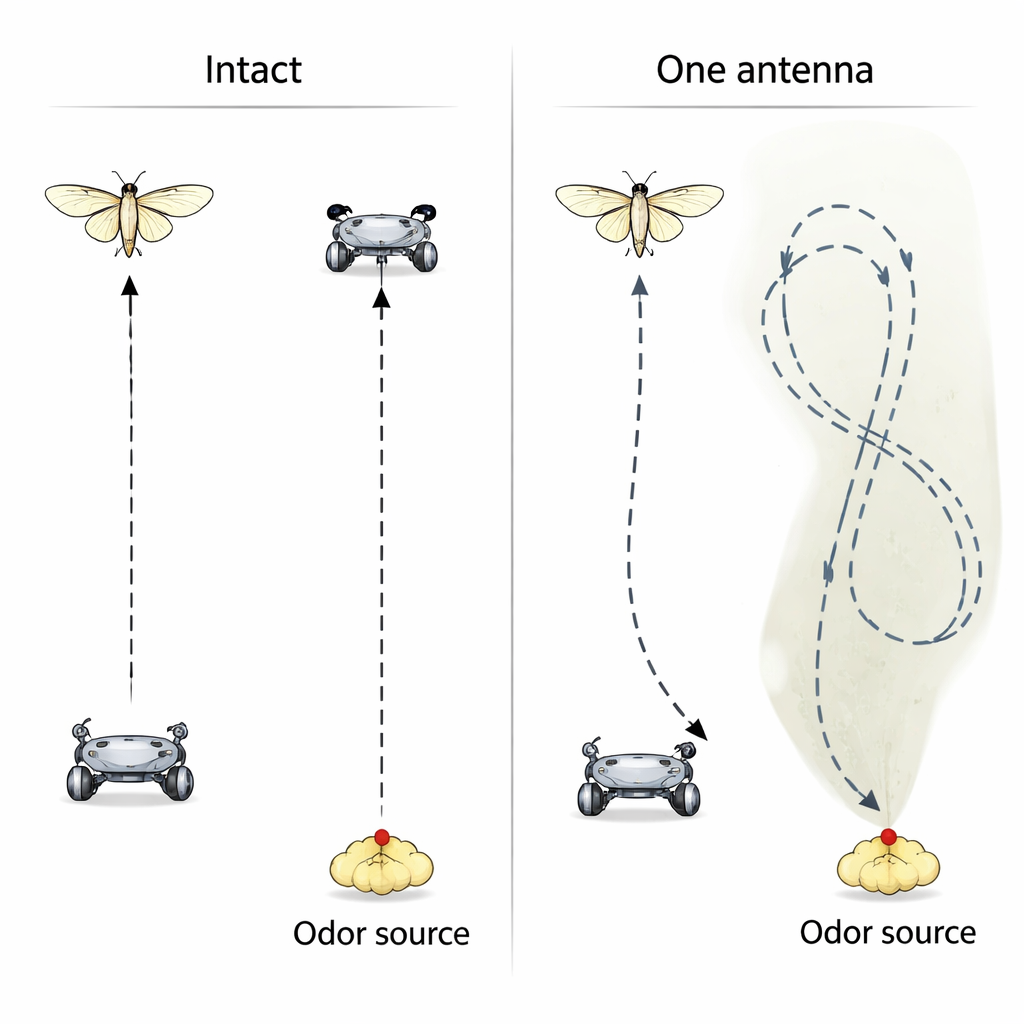
قام الباحثون أولاً باختبار مدى قدرة ذكور فراشة الحرير السليمة وذكور بإزالة القرن الأيسر على المشي إلى مصدر رائحة في المختبر. بدأت كلتا المجموعتين على بعد 15 سنتيمتراً من نقطة تصدر فيروموناً. بشكل مفاجئ، لم تنخفض نسبة النجاح — الوصول إلى المصدر خلال دقيقة — بشكلٍ كبير بعد إزالة أحد القرنين. ما تغير هو المسار: كانت العثّات السليمة تميل إلى السير على خط مستقيم إلى حد ما، بينما سلكت العثّات ذات القرن الواحد طرقاً أطول وأكثر التواءً تنحني نحو جانب القرن المتبقي. كشفت قياسات مفصلة لحركات الرأس أن العثّات غيّرت استراتيجيتها في الالتفاف اعتماداً على المكان الذي اكتُشفت فيه الرائحة على طول القرن المتبقي — بالقرب من القاعدة أو بالقرب من الطرف — وعلى جهة الدوران التي كانت تقوم بها حالياً.
قاعدتان بسيطتان مختبئتان في سلوك معقد
بالتنبيه المتكرر للرائحة من اليسار واليمين وتتبع زوايا رأس العثّات، حول الفريق السلوك إلى منحنيات احتمالية تُظهر مدى احتمال أن تدور العثة يساراً أو يميناً بعد كل نفخة. عندما أصابت الرائحة قرب قاعدة القرن، فضّلت العثة بقوة الاستمرار بالدوران نحو نفس الجانب، ما يكفل الالتزام بمواصلة الدوران الحالي. عندما أصابت الرائحة قرب الطرف، أصبح الخيار أكثر توازناً مع انحياز طفيف للاستكشاف في الجانب المقابل. ببساطة، لم تدفع فقدان القرن العثة إلى الاستسلام؛ بل جعلها تتبنى نمط بحث يعيّن عينات أوسع من جانبي الفضاء، خاصة على «حافة» عمود الرائحة حيث تتغير شدة الرائحة بسرعة.
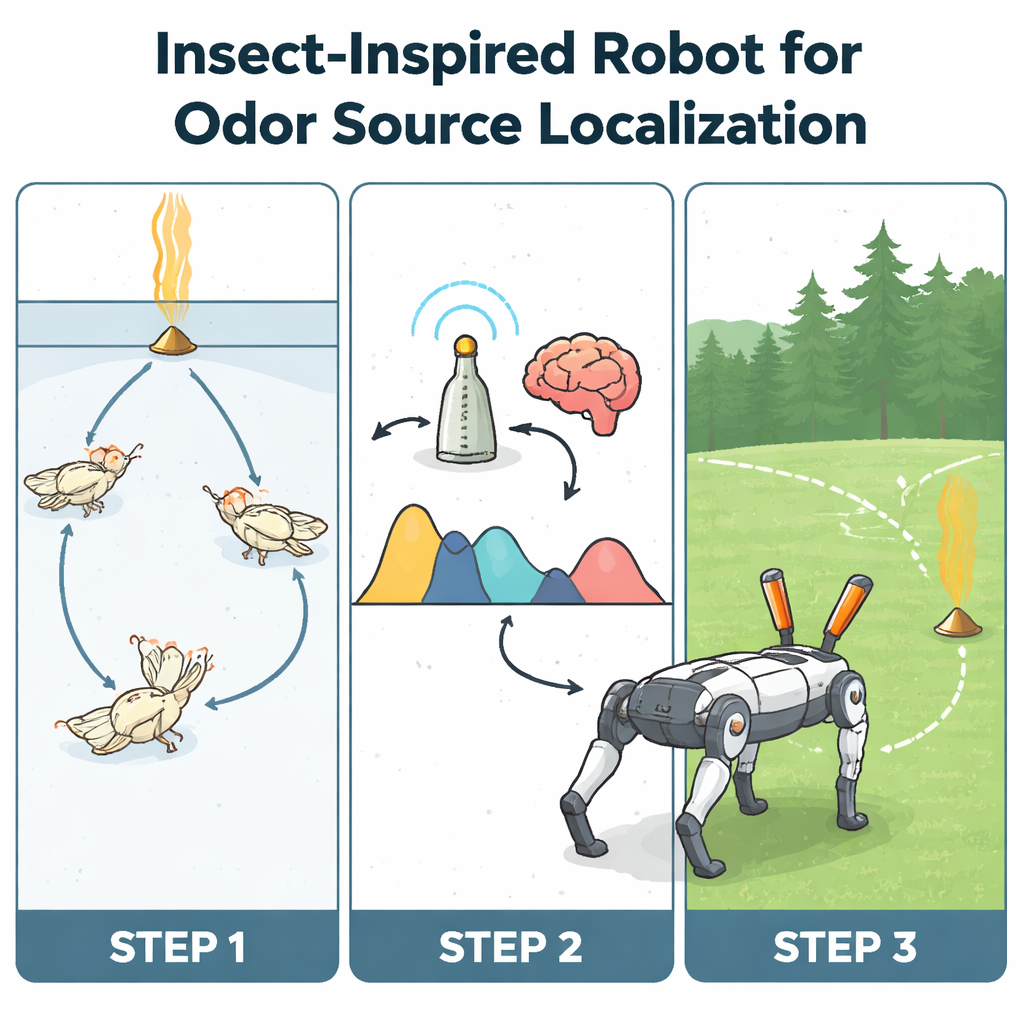
تعليم روبوت رباعي الأرجل أن يشم مثل العثة
بعد ذلك، بنى الباحثون روبوتاً رباعياً مزوّداً بأجهزة استشعار رائحة على «رأسه» مرتبة لتقليد البنية من القاعدة إلى الطرف في القرن. أنشأوا خوارزميتين للبحث. الأولى، نهج مستوحى من العثة قياسي يُدعى SZL (للانقضاض–الزجزاج–الحلقة)، يفترض وجود مستشعرين رائحتيْن عامليْن ويختار اتجاه «الانقضاض» المستقيم اعتماداً على التوقيت النسبي لاكتشافات اليسار واليمين. الثانية، المسماة خوارزمية مستوحاة من العثة معتمدة على السياق (CDMI)، تضمّن القواعد الجديدة للعثة: تقدر مكان اكتشاف الرائحة على طول المستشعر المتبقي وتستخدم منحنيات الاحتمالية المشتقة من تجارب الحيوان لتقرر أي اتجاه تتحرك وبأي حدّة تدير. في اختبارات داخلية، عملت SZL بأفضل شكل عندما كان المستشعران سليمين، مانحة مسارات سريعة ومستقيمة نسبياً. لكن عندما تعطّل مستشعر واحد، تفوقت CDMI بوضوح على SZL، حيث عثرت على المصدر في كثير من الأحيان باتباع الحافة المتغيرة لحقل الرائحة في مسارات حلقية تشبه مسارات العثّات ذات القرن الواحد.
روبوتات تظل ذكية عندما يتعطل شيء
لتعزيز الفكرة أكثر، اختبر الفريق روبوتاتهم في الهواء الطلق، حيث تجعل الرياح الطبيعية والاضطراب أعمدة الرائحة شديدة التقطّع. زوّدوا الروبوت السليم بالخوارزمية التقليدية SZL والروبوت «حيد الحسية» بخوارزمية CDMI. حقق كلاهما معدلات نجاح متقاربة، لكن الروبوت المتضرر الذي استخدم الاستراتيجية التكيفية المستوحاة من العثة غالباً ما وجد المصدر بمسارات أقصر وأقل التفافاً. هذا يوحي بأنه في ظروف العالم الواقعي الخشنة قد يكون الأفضل التبديل من مخطط استشعار دقيق لكنه هش إلى استراتيجية استكشافية أكثر تتبع الحواف. الرسالة الأوسع هي أن الملاحة القوية لا تتطلب ذكاءً اصطناعياً أكثر تعقيداً بالضرورة. بدلاً من ذلك، يمكن لقواعد بسيطة ومبنية على الأحياء—مرتبطة بكيفية توزيع المستشعرات على الجسد وكيفية تفاعل الجسد مع البيئة—أن تساعد في خلق روبوتات تستمر في العمل حتى عند فشل أجزاء رئيسية، وهي صفة حاسمة لمهمات الاستكشاف والإنقاذ طويلة الأمد.
الاستشهاد: Shigaki, S., Yokota, K., Sekiwa, R. et al. Insect-inspired adaptive behavioral compensation strategy against olfactory sensory deficiency for robotic odor source localization. npj Robot 4, 12 (2026). https://doi.org/10.1038/s44182-026-00080-5
الكلمات المفتاحية: الملاحة الشمية, الروبوتات المقتبسة من الطبيعة, تحديد مصدر الرائحة, الذكاء الاصطناعي المستوحى من الحشرات, الذكاء المتجسد