Clear Sky Science · ar
مقبض حساس للمس بكف نشط للتلاعب البارع
روبوتات تستطيع أن تشعر بما تمسكه
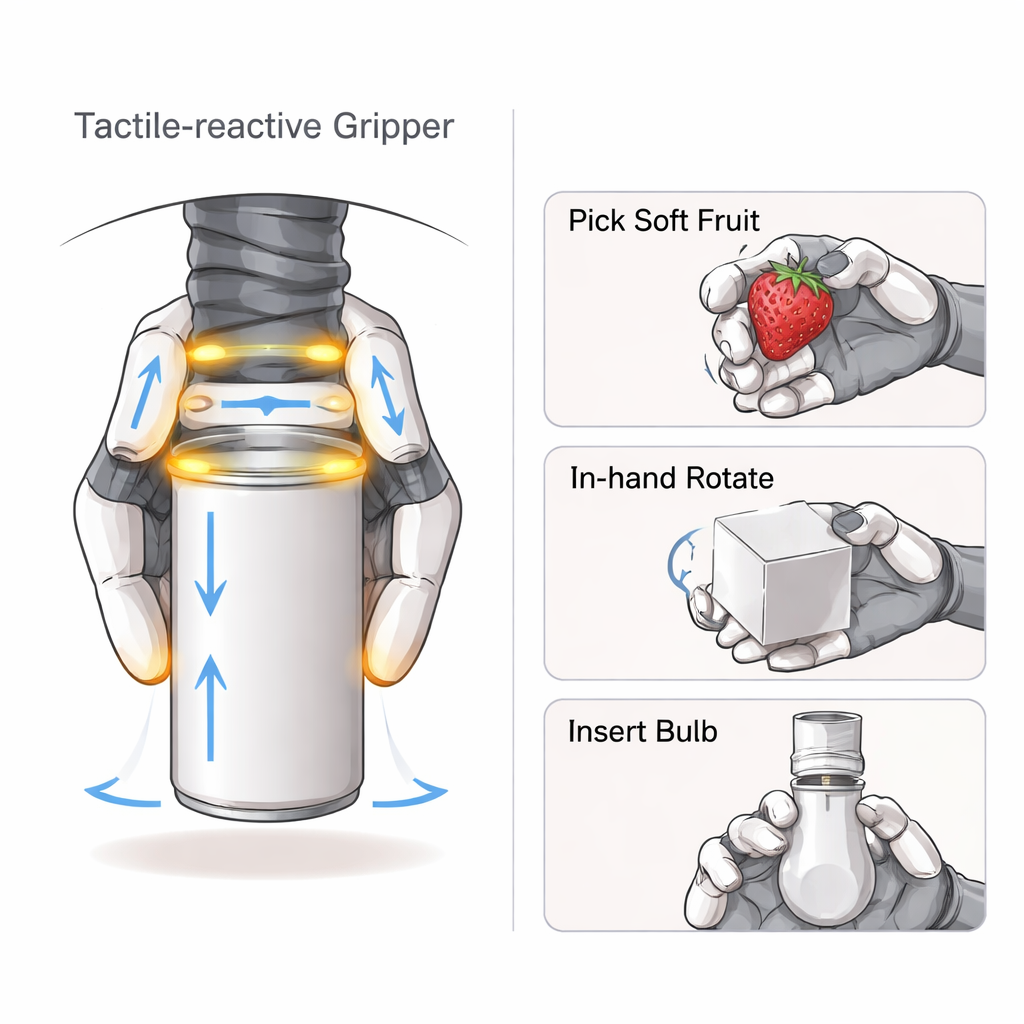
تخيل روبوتًا يمكنه قطف فراولة ناضجة برفق، أو فتح زجاجة محمية ضد الأطفال عن طريق الالتفاف، أو برغي لمبة إضاءة فوق الرأس—كل ذلك دون سحق أو إسقاط أو تحريك الأشياء بشكل خاطئ. تصف هذه الورقة مقبضًا روبوتيًا جديدًا يقرب الآلات من تلك المهارة اليدوية الحذرة الشبيهة بالبشر عبر تزويد الروبوت ليس فقط بأصابع ذكية، بل بكف نشط حساس للغاية.
كف يفعل أكثر من مجرد الإمساك
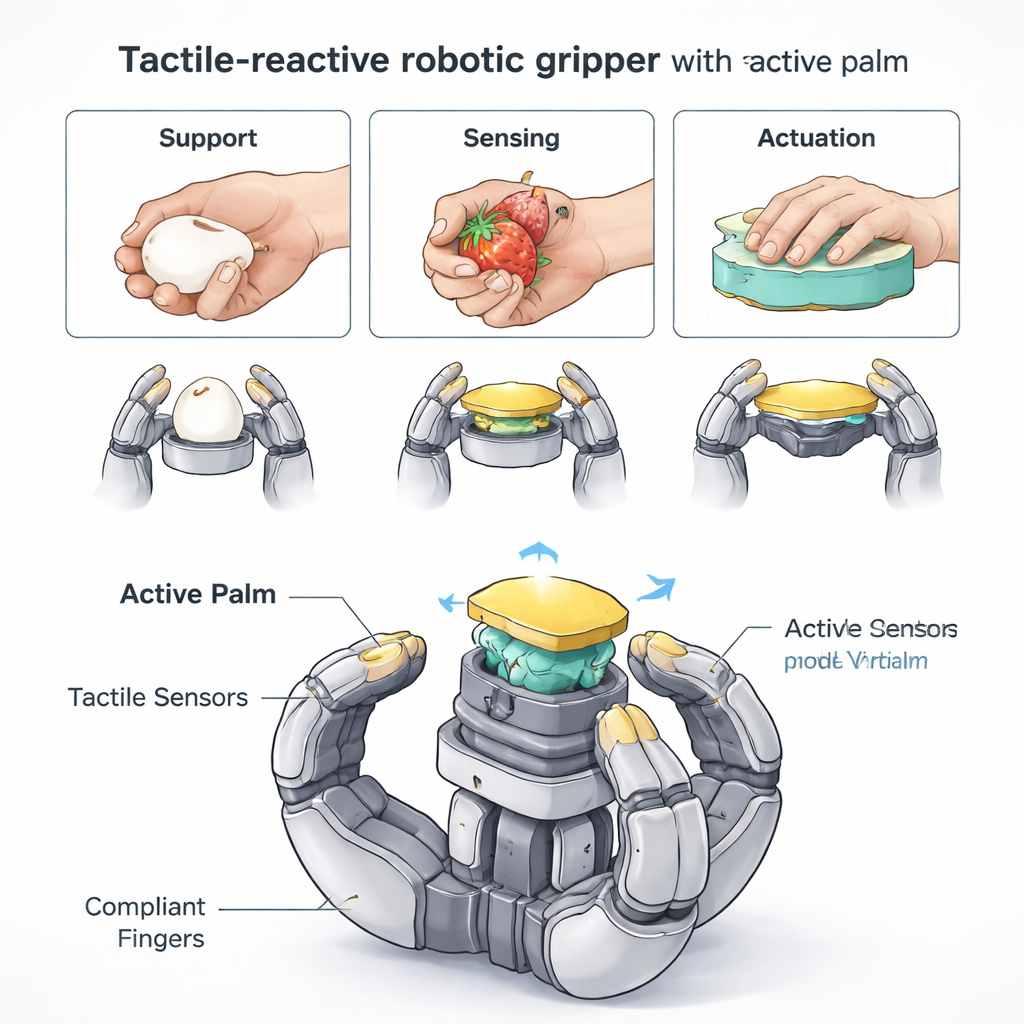
تحتوي معظم الأيدى الروبوتية اليوم إما على مخالب بسيطة وصلبة لا تستطيع سوى القبض، أو على أيدٍ متعددة الأصابع ومعقدة يصعب بناؤها والتحكم بها. الفكرة الجوهرية في هذا العمل هي أن اليد البشرية تعتمد بشكل كبير على الكف—ليس الأصابع فقط—للدعم والشعور والدفع. صمم الباحثون مقبضًا روبوتيًا ثلاثي الأصابع مع كف مركزي يمكنه التحرك صعودًا ونزولًا ومغطى بمستشعر لمسي مبني على كاميرا. كما أن لكل طرف إصبع لوحة ضغط مرنة خاصة به. معًا، تتيح هذه الأجزاء للمقبض أن يشعر بمكان وكيفية تلامسه مع الجسم ويعدل قبضته في الوقت الحقيقي، على الرغم من أن النظام بأكمله يستخدم سبعة مفاصل متحركة فقط.
حركات بسيطة، طرق متعددة للإمساك
يمكن للأصابع الثلاثة المتطابقة للمقبض أن تتحرك وتثني، مما يسمح بعدة أساليب إمساك يومية: احتضان عناصر كبيرة مثل الكرات، قرص أشياء رقيقة مثل البطاقات، وتثبيت أدوات ثقيلة في قبضة قوة. الهيكل الطري الشبيه بالفقرات للأصابع يلتف طبيعيًا حول أجسام ذات أشكال مختلفة دون برمجة تفصيلية. في الوقت نفسه، ينزلق الكف رأسيًا مثل مصعد، فيمكنه الضغط على الجسم، ومشاركة الحِمل مع الأصابع، أو تغيير موقع الجسم داخل اليد. تظهر المحاكاة والتجارب أنه حتى مع مفصلين فقط لكل إصبع بالإضافة إلى الكف المتحرك، يمكن لليد تحريك الأشياء في اتجاهات متعددة وتجنب وضعيات محرجة يصعب التحكم بها.
الشعور بالأصابع والكف معًا
لفهم ما تمسكه، يجمع المقبض بين ثلاثة أنواع من الاستشعار: صور لمس مفصّلة من الكف، خرائط ضغط من أطراف الأصابع، وقراءات زوايا المفاصل الخاصة به. يقوم نظام تعلّم آلي بدمج هذه الإشارات، مع إيلاء مزيد من الاهتمام للإشارات الأكثر فائدة لكل جسم. في اختبارات على علب مشروبات وكرات بأحجام ومواد مختلفة، تمكن النظام من التعرف على ما يمسكه بدقة تقارب 99٪. كما يوجه هذا الإحساس اللمسي الغني مقدار القوة اللازمة للضغط، ومتى يجب التوقف عن إغلاق الأصابع، وكيفية تحريك الكف للحفاظ على تماس مستقر دون خلق احتكاك مفرط.
من أجسام الاختبار إلى الفواكه والمصابيح
اختبر الفريق المقبض باستخدام معيار واسع الانتشار لتقييم إمساك الروبوت لأشياء يومية مثل الكرات والأدوات وقطع الأجهزة الصغيرة. سجل نقاطًا أعلى من عدة مقابض بحثية معروفة بينما استخدم أجزاء متحركة أقل. خارج مجموعات الاختبار، أظهر المقبض أنه يمكنه قطف فواكه هشة—فراولات، عنب، طماطم والمزيد—دون كدمات مرئية حتى بعد أيام، تم التأكد منها تحت ضوء فوق بنفسجي. كما استطاع تحريك وتدوير مكعبات واسطوانات بدقة داخل يده، وتركيب لمبة في مأخذ متجه للأعلى، ودفع مكبس محقنة أثناء إمساك الأسطوانة، وفتح أغطية مقاومة للأطفال بالضغط والالتفاف. في العديد من هذه المهام، وفر الكف المتحرك الدفع أو الدعم أو الاستشعار الإضافي الذي تفتقده مقابض الأصابع فقط.
لماذا يهم هذا للروبوتات المستقبلية
تُظهر هذه العمل أن الروبوتات لا تحتاج دائمًا إلى المزيد والمزيد من الأصابع أو المفاصل لتكون ماهرة. من خلال تنسيق عدد قليل من الأصابع المرنة مع كف حساس للمس ومتحكم بنشاط، يحقق هذا المقبض مزيجًا من القوة والنعومة والوعي يبدأ في الاقتراب من اليد البشرية. وبما أن الأجزاء مطبوعة ثلاثية الأبعاد في الغالب وتستخدم مستشعرات متاحة تجاريًا، فإن التصميم سهل النسخ نسبيًا. مع تحكم قائم على التعلّم أفضل، يمكن لمقابض مشابهة أن تساعد الروبوتات في حمل المشتريات، والمساعدة في الرعاية المنزلية، أو العمل بأمان مع البشر في المصانع—شعورًا واثقًا بما تفعل، بدلًا من مجرد التخمين.
الاستشهاد: Zhou, Y., Lee, W.S., Gu, Y. et al. Tactile-reactive gripper with an active palm for dexterous manipulation. npj Robot 4, 13 (2026). https://doi.org/10.1038/s44182-026-00079-y
الكلمات المفتاحية: مقبض روبوتي, الاستشعار اللمسي, التلاعب البارع, يد روبوتية, كف نشط