Clear Sky Science · ar
استغلال الإحساس الذاتي في الأجنحة الناعمة المائية لتمكين رفض اضطرابات هجين سلبياً-إيجابياً
أجنحة ذكية تحت الماء
كل من شاهد طائراً يحوم في رياح متقلبة أو سمكة تحافظ على ثباتها في تيار سريع رأى كيف تحل الطبيعة مشكلة هندسية صعبة: كيف تبقى على مسارها عندما يرفض السائل المحيط التصرف باحترام. تُظهر هذه الدراسة كيف أن نوعاً جديداً من الأجنحة الناعمة تحت الماء، المزود بـ«إحساس بالذات» شبيه بالإحساس الحسي لدى الحيوانات، يمكنه أن يكتشف تلقائياً تغيّرات التدفق المفاجئة ويعيد تشكيل نفسه ليحافظ على الاستقرار. يشير العمل إلى مستقبل من الروبوتات المائية التي تنساب بطريقة أقرب إلى الحيوانات وأقل شبهاً بالآلات الصلبة، موفرة للطاقة أثناء التعامل مع بحار هائجة.
التعلّم من الطيور والأسماك
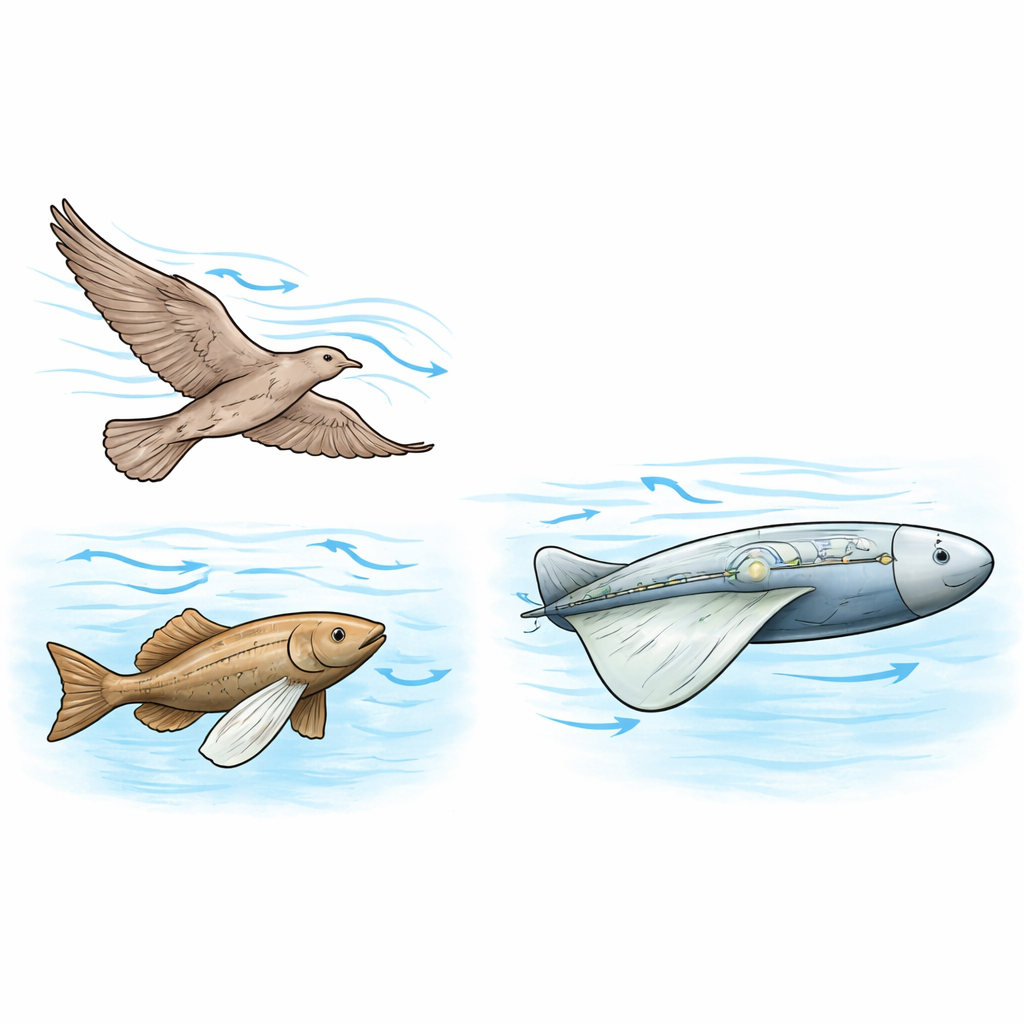
في الطبيعة، الأجنحة والزعانف ليست شفرات جامدة؛ إنها تنحني وتلتف وتتمايل. تشعر الطيور بحركة الهواء عبر مستقبلات دقيقة في ريشها، بينما تستخدم الأسماك خلايا حساسة للضغط على طول أجسامها وفي أشعة زعانفها. تتيح هذه الحواس المدمجة للحيوانات أن تشعر بكيفية تشكّل زوائدها في الماء أو الهواء وتستجيب بسرعة تقريباً، رافضةً هبوب الرياح والاضطرابات. بالمقابل، تعتمد معظم المركبات تحت الماء على أسطح تحكم صلبة وأجهزة منفصلة لقياس التدفق، ما يجعلها بطيئة الاستجابة وتستهلك طاقة أكبر عندما يصبح المحيط فوضوياً. يجادل المؤلفون بأن الجمع بين المرونة والحس في هيكل واحد ناعم قد يقلص هذه الفجوة.
جناح ناعم مزوَّد بحواس مدمجة
بنَت الفريق نصف جناح للاستخدام تحت الماء يزاوج ذيلًا ناعمًا قابلًا للانحناء بأنف صلب. داخل الجزء الناعم تجري أنابيب قابلة للنفخ مملوءة بسائل، يمكن تضييق ضغطها أو تفريغه لتغيير انحناء الجناح، أو ما يُسمّى الكمبر. في الخارج، لَصقوا «جلداً» إلكترونياً رقيقاً مصنوعاً من السيليكون وأسلاك من سائل معدني. عندما ينحني الجناح، يتغير تباعد هذه الموصلات المدفونة، ما يغير سعاتها الكهربائية. من خلال تدريب نموذج بسيط للتعلّم الآلي لربط هذه الإشارات بالأشكال المتتبعة بالكاميرا، حول الباحثون الجلد الإلكتروني إلى مستشعر شكل عالي الدقة. بعد التدريب، يستطيع النظام تقدير كمبير الجناح في الزمن الحقيقي دون كاميرات خارجية، حتى أثناء الغمر بالماء.
تحويل الشكل إلى تحكم
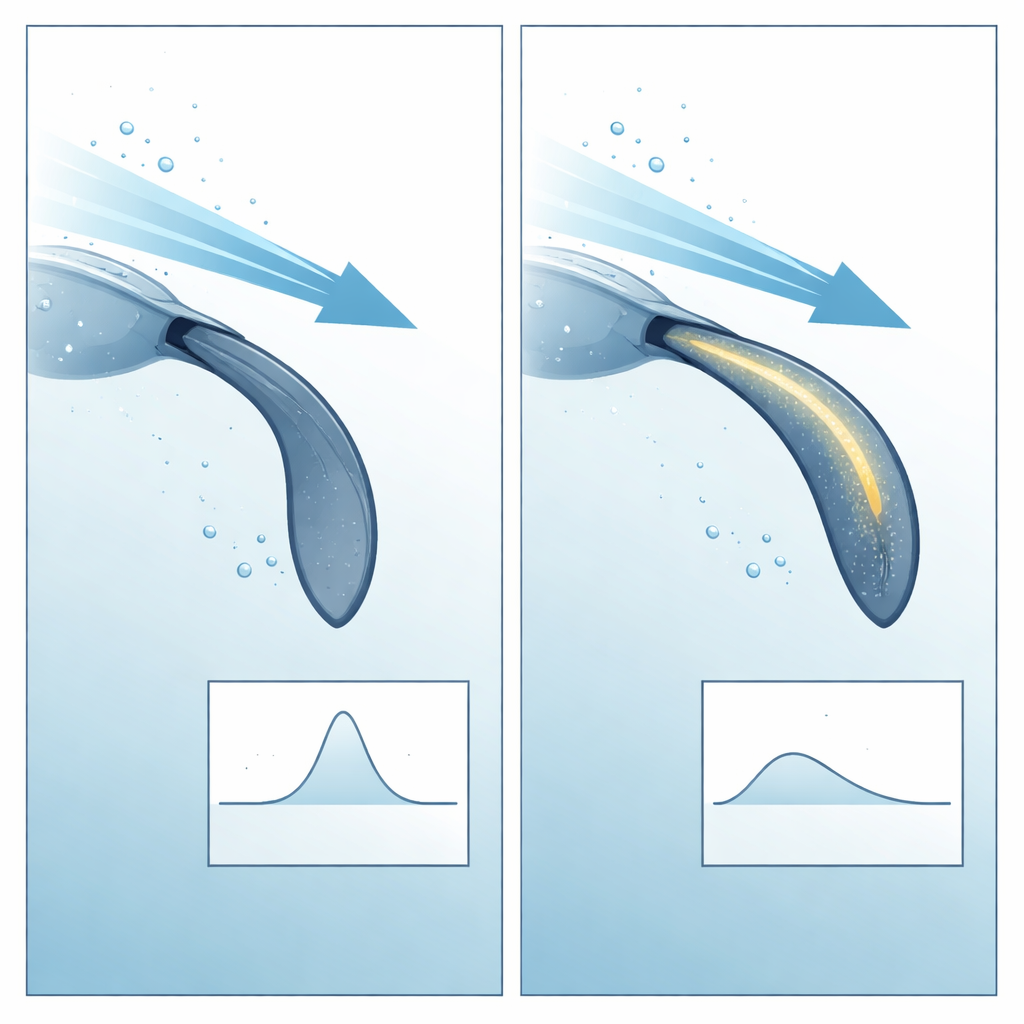
بوجود هذا الجناح الحسي الناعم مركباً في نفق مائي، حاكى الباحثون الهبات على شكل تغيّرات مفاجئة في زاوية الجناح بالنسبة للتدفق. أظهروا أولاً، في ظروف ثابتة، أنه من خلال تعديل الكمبر يمكن إنتاج الرفع ذاته عند زوايا تدفق مختلفة، أو رفعات مختلفة عند نفس الزاوية. يعني هذا أنه عندما تحاول هبة الريح إخراج الجناح عن اتزانه، هناك «مسار» في فضاء الأشكال يمكنه استعادة الرفع المطلوب. ثم برمجوا استجابة حلقة مفتوحة مثالية—معرفة بالضبط متى ستحدث الهبة—لنفخ أو تفريغ الأنابيب الداخلية في اللحظات المناسبة. في هذا السيناريو في أفضل الأحوال، خفض تغيير الكمبر الانخفاض في الرفع أثناء الاضطراب من نحو 50٪ إلى حوالَي 10٪ تقريباً.
ترك الجناح ليتفاعل بمفرده
الاختبار الأصعب كان السماح للجناح بأن يقرر بنفسه متى حدث خطب ما. هنا يكتشف الجلد الإلكتروني «بصمة» مميزة في إشارة الكمبر: اندفاع سريع يليه تذبذب بينما يثني الجسم الناعم تحت تغير مفاجئ في التدفق. عندما يظهر هذا النمط، يقوم متحكم بسيط بنفخ الأنابيب في الاتجاه الأكثر احتمالاً لإعادة الرفع نحو هدفه، من دون حساب صريح للتدفق أو القوى. حتى هذه الاستراتيجية الحدّية تعمل جيداً. بالمقارنة مع جناح صلب مكافئ، يقلل الجناح الناعم غير المُفعل وحده من نبضة الهبة—أي الدفع الكلي المُسَلّم عبر الزمن—بمقدار يقارب ثلاثة أضعاف. عندما يُضاف التحكم النشط، ينخفض إجمالي نبضة الرفع غير المرغوب فيها بنسبة تصل إلى 87٪، مقترباً وحتى متجاوزاً قدرة مواجهة الهبات المبلغ عنها لبعض الطيور، وإن كان ذلك في وسط مختلف.
لماذا يهم هذا للروبوتات المستقبلية
للقارئ العام، الخلاصة الأساسية هي أن جعل الروبوتات تحت الماء أكثر ليونة وأكثر وعيًا بذاتها يمكن أن يجعلها أكثر متانة وكفاءة في آن واحد. بدلاً من مقاومة الاضطرابات بمحركات قوية ومستشعرات خارجية معقدة، يساعد جسم الروبوت المرن وجلده المدمج على امتصاص وقراءة التدفق، مما يثير تغييرات شكل متواضعة تحافظ على مساره. بينما تركز هذه الدراسة على جناح تجريبي واحد في حوض مراقب، يمكن أن تنطبق نفس المبادئ على مركبات كاملة أو روبوتات سباحة شبيهة بالأسماك. على المدى الطويل، قد تسمح مثل هذه «الذكاء المتجسّد» للآلات باستكشاف محيطات مضطربة بنفس الرشاقة الهادئة التي تظهرها الطيور والأسماك في الهواء والماء.
الاستشهاد: Micklem, L., Dong, H., Giorgio-Serchi, F. et al. Harnessing proprioception in aquatic soft wings enables hybrid passive-active disturbance rejection. npj Robot 4, 16 (2026). https://doi.org/10.1038/s44182-026-00078-z
الكلمات المفتاحية: الروبوتات الناعمة, المركبات تحت الماء, تصميم مُستلهم من الطبيعة, رفض اضطرابات التدفق, الاستشعار الذاتي/بروprioception