Clear Sky Science · ar
الإحساس اللمسي المتجسد بخصائص الأجسام اللينة
لماذا تعلّم الروبوتات على الإحساس مهم
تخيل روبوتًا يفحص بطن مريض بلطف، أو يفرز الفاكهة الناضجة دون أن يسبب لها كدمات، أو يركّب قطعًا هشة بمجرد اللمس. للقيام بأي من ذلك بأمان، يجب أن يتعلّم الروبوت «الإحساس» بالأجسام اللينة بطريقة غنية تشبه الإنسان. يصف هذا المقال كيف بنى الباحثون جلدًا إلكترونيًا ونموذج تعلم جديدًا حتى تتمكن الروبوتات من استشعار اللين والشكل وملمس السطوح للأجسام الطرية—مما يقرب الآلات خطوة نحو اللمس البارع الحقيقي.
بناء حس لمسي عالي التقنية
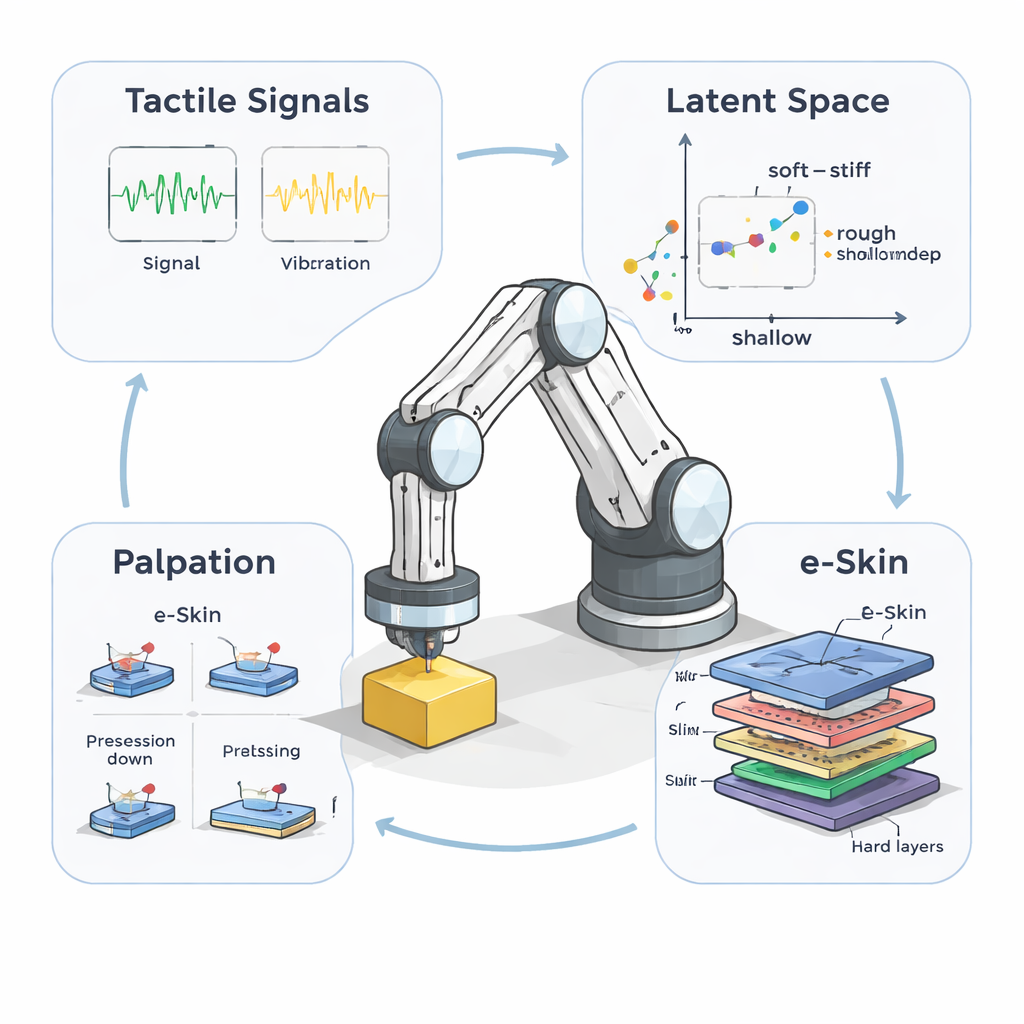
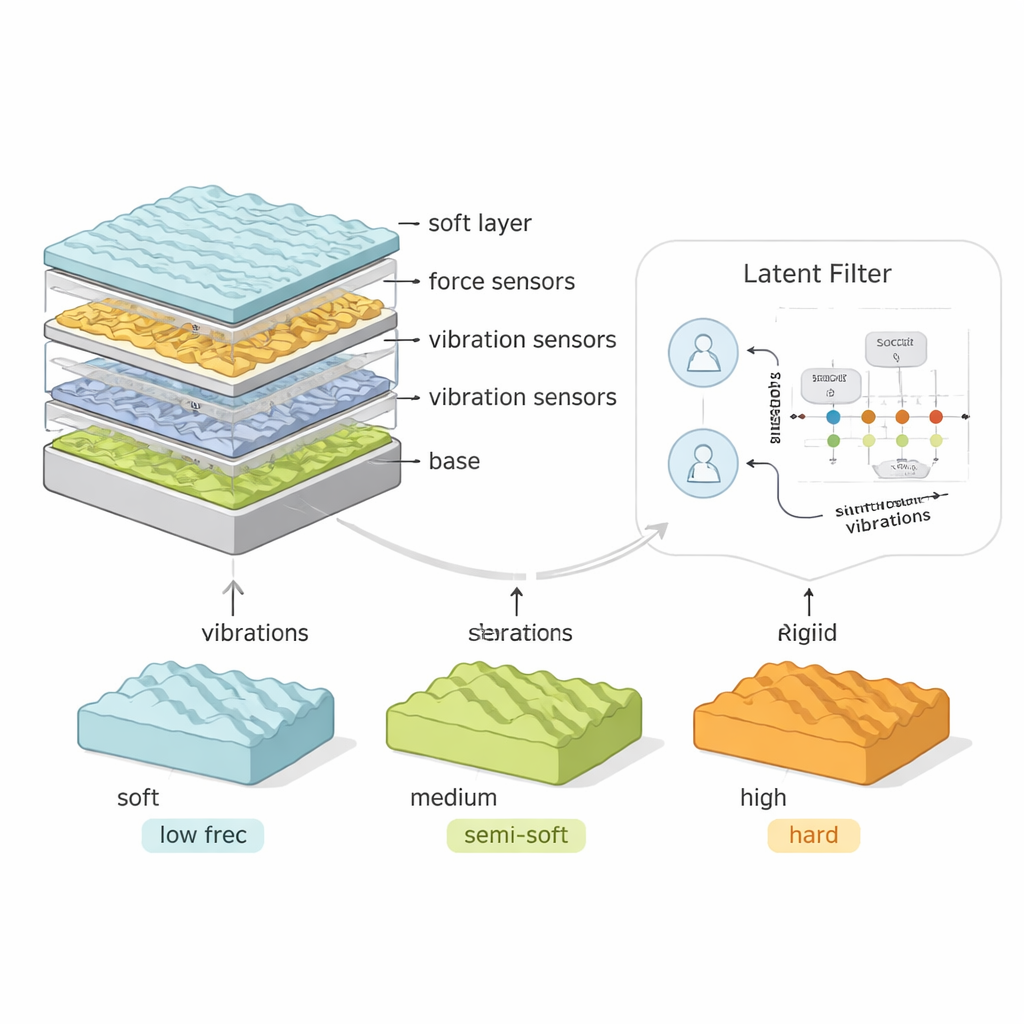
الجلد البشري لين ومكوَّن من طبقات ومليء بمستقبلات لمس مختلفة تتفاعل مع الضغط والشد والاهتزاز. انطلق الفريق لمحاكاة هذه القدرات في روبوت. أنشأوا جلدًا إلكترونيًا معياريًا، أو e‑Skin، مصنوعًا من طبقات سيليكون مكدسة تضم حساسات مدمجة. تحتوي طبقتان على شبكات كثيفة من حساسات القوة التي تقيس مقدار انغماس الجلد في نقاط مختلفة، بينما تحمل طبقة ثالثة مقاييس تسارع صغيرة تلتقط الاهتزازات السريعة، مثل ذبذبة الإحساس عند تحريك الإصبع فوق قماش خشن. بتغيير أنواع السيليكون يمكنهم جعل الجلد الإلكتروني أنعم أو أكثر صلابة، وبإطفاء أو تشغيل طبقات الحساسات استطاعوا اختبار تركيبات مختلفة من «أعضاء الحِسّ».
تصميم عالم من الأشياء اللينة
لدراسة اللمس بطريقة مضبوطة، احتاج الباحثون إلى أكثر من كتل مطاطية بسيطة. أنشأوا مكتبة من «أجسام الموجة» ذات خصائص مضبوطة بعناية. كان لكل جسم سطح علوي مموج يمكن أن تكون نتوءاته ضحلة أو عالية (السعة) وقريبة أو متباعدة (التردد المكاني)، وصُبَّت كل قطعة من مواد تتراوح من سيليكون لين جدًا إلى بلاستيك صلب. بعض العينات أخفت أيضًا طبقة رقيقة صلبة تحت سطح لين، مقلدة الأنسجة أو المواد التي تتغير خصائصها عند الضغط بعمق. سمح ذلك للفريق بمعرفة الليونة والملمس الدقيق لكل جسم ألمسه الروبوت، حتى يتمكنوا من مقارنة ما «شعر» به الروبوت مع الحقيقة المرجعية.
تعلّم الروبوتات الاستكشاف باللمس
تمامًا كما يدق الناس ويضغطون ويحركون أصابعهم بطرق مختلفة للحكم على جسم ما، استخدم الروبوت ثلاث حركات سبر أساسية. في الضغط، تحرك لأعلى وأسفل للتحقق من الليونة العامة. في الحركة الانسيابية الدورانية (precession)، أمال ودرّ الجلد الإلكتروني، ملامسًا مناطق قريبة متعددة ومستكشفًا أشكالًا أكثر تعقيدًا. في الانزلاق، تحرك الأفقي عبر السطح لإبراز القوام الدقيق والاحتكاك. لكل جسم، أدى الروبوت هذه الحركات بعمقات وسرعات متنوعة، مولدًا آلاف الإشارات اللمسية الزمنية—قوى تتغير عبر الجلد واهتزازات تنتشر خلاله. هذه التيارات الدينامية الغنية أكثر إفادة بكثير من قرصة ثابتة واحدة.
اكتشاف أنماط مخفية في اللمس
لفهم هذا السيل من المعلومات، قدّم المؤلفون نموذج تعلم آلي أطلقوا عليه مُرشّح الكامن (Latent Filter). بدلًا من محاولة تسمية الأشياء مباشرة، يتعلّم النموذج «خريطة» داخلية حيث يختزل كل نقطة التفاعل المستمر للروبوت مع جسم ما. تُنظَّم المساحة الكامنة بحيث تستجيب بعض المكونات بسرعة لإشارات اللمس الفورية، بينما تدمج مكونات أخرى المعلومات ببطء عبر الزمن. من خلال تدريب مُرشّح الكامن على العديد من التفاعلات، أظهر الفريق أن هذه الخريطة الداخلية تصطف بطبيعتها مع صفات مادية ذات معنى مثل خشونة السطح، ارتفاع النتوءات، والصلابة—حتى إن النموذج لم يُعلّم بتلك التسميات صراحة. خطوة الانحدار المنفصلة أكدت أن هذه الميزات المختبئة يمكنها التنبؤ بخواص الجسم الميكانيكية الحقيقية بدقة جيدة.
كيف يتكامل الجلد والحواس والحركة
كشفت التجارب أنه لا توجد طبقة حسية واحدة أو استراتيجية حركة واحدة تناسب كل الحالات. أدت مزج معلومات الاهتزاز والقوة عبر نهج «الدمج المتأخر»—حيث يُعالَج كل نوع إشارة بشكل منفصل قبل دمجها—إلى أفضل فهم موثوق للأجسام اللينة. ساعدت طبقتان من حساسات القوة النظام على استشعار القص والتمدد، وهما أمران حيويان لاكتشاف الصلابة والبنية الداخلية المخفية، بينما كانت الاهتزازات مفيدة خصوصًا للشعور بالأنسجة الدقيقة أثناء الانزلاق. كما أن ليونة الجلد الإلكتروني نفسه كانت مهمة: فالجلود الأكثر صلابة كانت أفضل في قياس الصلابة العامة والشكل، بينما تفوقت الجلود الأطرى في استشعار التباينات الدقيقة في المواد المطيعة أو ذات الطبقات. تشير النتائج إلى أن اللمس الروبوتي يجب أن يصمم بطريقة مشتركة: خصائص الجلد والإلكترونيات الحسية وطريقة حركة الروبوت يجب أن تُعدَّل معًا.
ماذا يعني هذا للروبوتات اليومية
بجمع جلد إلكتروني متعدد الطبقات مستوحى من البشر مع نموذج تعلم قوي يحترم دور الحركة، يبيّن هذا العمل كيف يمكن للروبوتات أن تبني حاسة لمس أعمق. بدلًا من الاعتماد فقط على الكاميرات أو عتبات قوة بسيطة، قد تستطيع الآلات المستقبلية أن تشعر بكيفية استسلام الجسم أو اهتزازه أو تغيّره أثناء استكشافه، ثم تعدل قبضتها أو حركتها في الحال. مثل هذه القدرات أساسية لتطبيقات مثل الفحص الطبي باللمس، وتعامل مع الأغذية الطرية، والتعامل مع الأشياء القابلة للتشوه في المنازل والمصانع. ببساطة، تُظهر الدراسة أنه لكي تلمس الروبوتات العالم بفعالية كما نفعل، يجب أن تمتلك ليس فقط حساسات جيدة، بل أيضًا «جسمًا» مناسبًا وعادات حركة صحيحة—وطريقة ذكية لنسج كل تلك المعلومات في فهم متماسك لما تشعر به.
الاستشهاد: Dutta, A., WM Devillard, A., Zhang, Z. et al. Embodied tactile perception of soft objects properties. npj Robot 4, 15 (2026). https://doi.org/10.1038/s44182-026-00077-0
الكلمات المفتاحية: اللمس الروبوتي, الجلد الإلكتروني, استشعار الأجسام اللينة, الإدراك اللمسي, الروبوتات المتجسدة