Clear Sky Science · ar
GenHand: إعادة توجيه حركية لممسكات بشرية معممة
تعليم الروبوتات كيف تمسك الأشياء كما نفعل
من حمل كوب قهوة إلى لف مفك، تبدو تعاملات أيدينا مع الأشياء سهلة وبلا جهد. الروبوتات، مع ذلك، غالبًا ما تكافح للإمساك بالأشياء اليومية بشكل موثوق، لا سيما عندما لا تشبه ملاقطها اليد البشرية. يقدم هذا المقال GenHand، نظامًا يتعلم من حركات اليد البشرية في صور عادية ويحويلها إلى أمساك ثابتة بطابع بشري لأنواع مختلفة من أيدي الروبوت.
لماذا تحتاج أيدي الروبوت إلى أكثر من حركات مقلدة
تحاول العديد من أنظمة التشغيل عن بُعد والتعلم بالتقليد الحالية نسخ وضع اليد البشرية مباشرة إلى يد الروبوت. تطابق مواقع أطراف الأصابع وزوايا المفاصل قدر المستطاع. ينجح هذا فقط عندما تشبه يد الروبوت اليد البشرية ولها عدد مماثل من الأصابع والمفاصل. بمجرد أن تكون ملاقط الروبوت أبسط — مثل اصبعين مسطحتين — قد لا يخلق الوضع المنسوخ قبضة آمنة. تتجاهل هذه الأساليب أيضًا إلى حد كبير شكل الجسم ومواقع الاتصال الصلبة المرغوبة، لذا قد تنزلق القبضات الناتجة أو تفقد توازنها أو لا تلامس السطح بشكل صحيح.
النظر إلى اليدين والشيء معًا
يتعامل GenHand مع هذه المشكلة من خلال التركيز على التفاعل بين اليد والشيء، وليس فقط على شكل اليد. انطلاقًا من صورة RGB عادية، يعيد النظام بناء نموذج ثلاثي الأبعاد مفصل للشيء ونموذج بارامتري ثلاثي الأبعاد لليد البشرية. يستخدم شبكة عصبية لاستنتاج وضع اليد، وتمثيلًا متقدمًا باسم «المسافة الموقعة» لاستعادة سطح الجسم. من هذين النموذجين، يحدد GenHand أين تتلامس أطراف أصابع الإنسان بالفعل وفي أي اتجاهات تُمارَس القوى على الجسم. ثم يجمع نقاط الاتصال هذه إلى مجموعة صغيرة من المناطق ذات المعنى واتجاهات القوة التي تلخّص البنية الأساسية للإمساك البشري مع تصفية التفاصيل غير الضرورية.
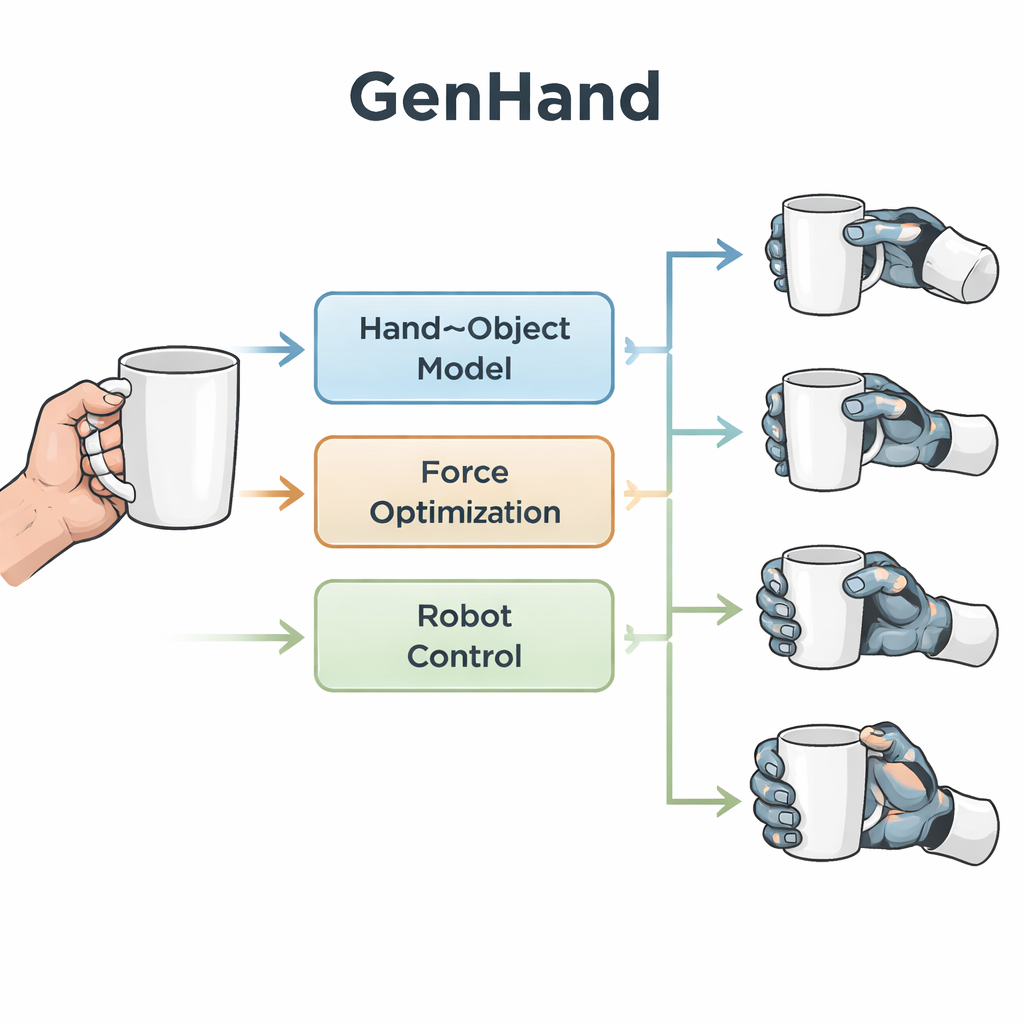
إعادة اختراع القبضة لكل روبوت
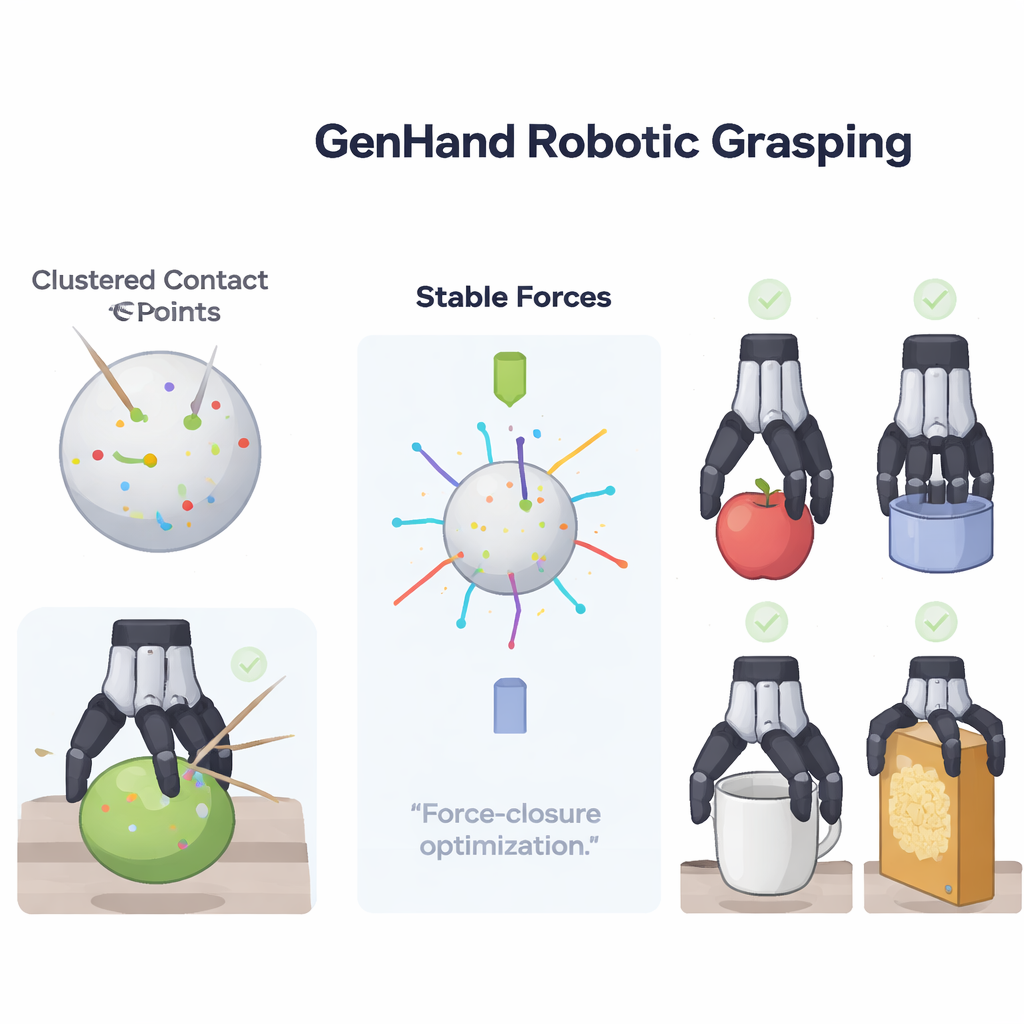
بمجرد أن يفهم GenHand مناطق الاتصال الرئيسية وكيف تدعم الجسم، يبني مجموعة جديدة من «مرتكزات الاتصال» التي تناسب ملقط الروبوت المعين. بالنسبة لمِلقط بسيط ذو إصبعين، قد يحتفظ بمنطقتي اتصال متقابلتين فقط، مثل زوج من الإبهامين يضغطان على صندوق. بالنسبة للأيادي الأكثر براعة ذات ثلاثة أو أربعة أو خمسة أصابع، يمكنه تخصيص مرتكزات إضافية لمضاهاة نمط الاتصال الغني للإمساك البشري. ثم تبحث خطوة تحسين رياضية عن مواقع اتصال على سطح الجسم يمكنها موازنة القوى والعزوم في جميع الاتجاهات، خاصية تُعرف باسم إغلاق القوة. والأهم أن GenHand يبقى قريبًا من اتصالات الإنسان الأصلية مع التأكيد على أن القبضة الناتجة ستكون مستقرة في العالم الحقيقي.
من اتصالات مستقرة إلى حركات روبوتية فعلية
مع وجود مرتكزات اتصال مستقرة، يعثر مرحلة تحسين ثانية على زوايا المفاصل وحركات الرسغ الفعلية للروبوت التي يمكنها تحقيق تلك المرتكزات دون خرق حدود المفاصل أو التسبب في تصادمات مع الجسم. لتحقيق ذلك، يطابق GenHand مرارًا مواقع الاتصال المحتملة للروبوت مع المرتكزات المرغوبة، ويعدّل الوضع، ويفحص ما إذا كانت أجزاء الروبوت تخترق الجسم. يُطبّق هذا الإجراء على مجموعة من أيدي الروبوت — من مِلقط Robotiq البسيط ذي الإصبعين حتى يد Shadow المكوَّنة من خمسة أصابع ذات الحركة المعقدة — ويختبر في محاكاة فيزيائية. مقارنةً بمنهج مرجعي رائد يقتصر على محاكاة هندسة أطراف الأصابع، ينتج عن GenHand اختلال قوى أقل بكثير، واتصال سطحي أكثر دقة، ومعدلات نجاح أعلى بكثير عند رفع وحمل 20 جسمًا يوميًا عبر ظروف احتكاك مختلفة.
إلى أين يمكن أن يقود هذا الروبوتات اليومية
بالنسبة للقارئ العام، الخلاصة أن GenHand يمنح الروبوتات إحساسًا أفضل بـ«كيفية» إمساك الأشياء، وليس فقط «أين» تضع أصابعها. من خلال التعلم من الإمساكات البشرية الحقيقية وفرض قواعد أساسية للثبات الفيزيائي، يمكنه إعادة توجيه نفس العرض البشري إلى أيدي روبوتية مختلفة جدًا مع تحقيق إمساكات متينة وموثوقة. هذا يجعل الروبوتات المشغلة عن بُعد أسهل في التحكم، ويساعد أنظمة التعلم على التدريب على أمثلة أغنى، ويقربنا من روبوتات منزلية ومهنية قادرة بأمان على التلاعب بنفس المجموعة الواسعة من الأشياء التي يتعامل معها البشر.
الاستشهاد: Qi, L., Popoola, O., Imran, M.A. et al. GenHand: generalised human grasp kinematic retargeting. npj Robot 4, 19 (2026). https://doi.org/10.1038/s44182-026-00076-1
الكلمات المفتاحية: التقاط روبوتي, التشغيل عن بُعد, عرض بشري, أيدي الروبوت, التلاعب