Clear Sky Science · ar
مشبك روبوتي صغير قابل للطباعة ثلاثية الأبعاد وبكلفة منخفضة مزود بكاميرا مدمجة لاستشعار القوة والعزم عبر الرؤية
لماذا تهم المشابك الناعمة الصغيرة
تتقلص أحجام الروبوتات وتتوسع مهامها الدقيقة، من تجميع التروس الصغيرة إلى قطف التوت الناضج دون سحقه. لكن غالبية الأيدي الروبوتية لا تزال تمسك بعَمًى إلى حد كبير، بقدرة محدودة على تقدير مقدار الضغط. تعرض هذه المقالة مشبكًا مصغرًا منخفض التكلفة ومطبوعًا ثلاثيًّا أطلق عليه اسم «سيزر»—يمكنه الإمساك بالأجسام الهشة وفي الوقت نفسه «إحساس» القوى باستخدام كاميرا صغيرة داخل رؤوس الأصابع بدلًا من مجسات قوة باهظة الثمن.
يد لطيفة ترى
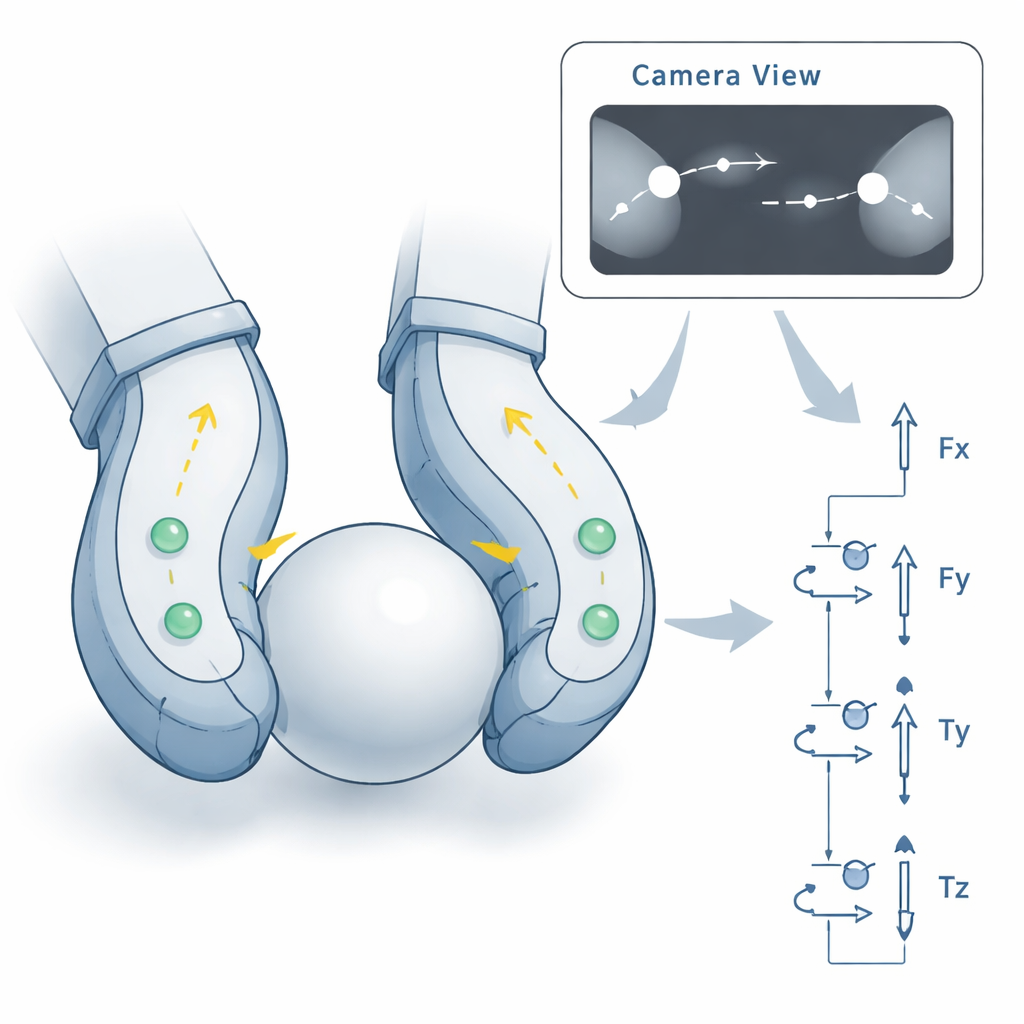
الـ Seezer مشبك روبوتي ناعم ومرن حيث تنحني الأصابع بدلًا من المفصلات المعدنية التقليدية. الفكرة الأساسية هي تصنيع كل شيء تقريبًا قطعة واحدة على طابعة ثلاثية الأبعاد للاستخدام المنزلي: قطعة إصبع متجانسة تتضمن مفاصل مرنة، وأشكال رؤوس أصابع مكيَّفة للمهمة، وعلامات صغيرة مدمجة. تنزلق وحدة الإصبع القابلة للاستبدال هذه على وحدة محرك مدمجة تضم كاميرا مصغرة ومصابيح. مع دوران المحرك لعتاد دودي، تنثني المفاصل المرنة وتغلق الأصابع حول الجسم، بينما تراقب الكاميرا رؤوس الأصابع والمساحة أمام المشبك.

قراءة القوة من انحناءات الإصبع
بدلًا من تضمين أسلاك أو مقاييس إجهاد أو وسادات ضغط داخل الأصابع، يطلِع الـ Seezer سطح الداخل بإشارات بصرية غنية بالمعلومات. يحمل كل رأس إصبع علامات دائرية صغيرة «مُعَرِّفة» تتغير مواقعها في صورة الكاميرا كلما تشوّه الإصبع. تكتشف البرمجية هذه العلامات وتتتبعها في كل إطار. ثم، استنادًا إلى تسلسل معايرة قصير، تتعلّم نماذج رياضية بسيطة كيف ترتبط تغيّرات مواقع العلامات بالقوى الفعلية للدفع والسحب على كل رأس إصبع. بدمج قوى رؤوس الأصابع الثلاثة مع مبادئ فيزيائية أساسية، يقدّر النظام القوى والعزوم الإجمالية المؤثرة على المشبك في جميع الاتجاهات الستة، بالإضافة إلى قوة الضغط بين الأصابع.
مدى دقته في الإحساس بالقوى
للتحقق من دقة هذا الاستشعار القائم على الكاميرا، قارَن المؤلفون تقديرات الـ Seezer بقراءات جهاز قوة/عزم تجاري عالي الدقة في إعداد مخبري مسيطر عليه. في إصدار من تصميم الإصبع (بِرؤوس أكثر صلابة)، قاس المشبك قوى قبضة تصل إلى نحو 1.1 نيوتن مع أخطاء نمطية بين 8٪ و17٪، وأخطاء في قوى وعزوم المحاور الستة تتراوح غالبًا بين 8٪ و24٪. إصدار ذو رؤوس أكثر نعومة ضحّى ببعض القوة القصوى مقابل حساسية أكبر، منتجًا قوى أصغر لكن مع نسب أخطاء متقاربة. والأهم أن النماذج احتاجت فقط من 31 إلى 141 نقطة بيانات للمعايرة—أقل بكثير من آلاف الصور التي تتطلبها طرق التعلم العميق التي تعمل على إطارات كاميرا كاملة.
من التروس الصغيرة إلى التوت الطري
تُبرز مهمتان تجريبيتان ما يمكن أن يقوم به هذا المشبك في بيئات العالم الحقيقي. في واحدة، كرّر الـ Seezer التقاط تروس مطبوعة ثلاثيًّا صغيرة من محاورها، ونقلها، وأعادها إلى أماكنها، مستعينًا بالكاميرا الداخلية كلًّا لمحاذاة ممر المفتاح مع المحور ولمراقبة حركة الأصابع. هذا يحاكي أعمال تجميع صناعي دقيقة في مساحات ضيقة. وفي مهمة أخرى، قطف المشبك عنب ريدكرنت من سيقانه. هنا راقب النظام قوة القبضة المقدرة في الوقت الحقيقي وتوقّف عن الإغلاق عند بلوغ عتبة قوة محددة مسبقًا، فتم قطف الحبة دون سحقها. كلتا التجربتين عملتا على إلكترونيات رخيصة وأظهرتا أن تصميمًا واحدًا يمكن أن يتعامل مع أجسام صلبة وناعمة بحجم بضعة مليمترات.
التحديات والاستخدامات المستقبلية
الـ Seezer لا يزال إثبات مفهوم وله قيود. تعمل تعقُّب العلامات بشكل أفضل في مشاهد مستقرة ومضاءة جيدًا مع خلفيات غير معقدة؛ قد تؤدي تغييرات الإضاءة، والأسطح اللامعة، والحركات المعقدة إلى أخطاء تتبع. ومعدل إطار الكاميرا المتواضع يقيّد أيضًا مدى سرعة استجابة النظام للتحكم القوي الضيق أو لتقديم ردود لمسية غنية. قد تتعب مواد الأصابع أو تتغير سلوكياتها مع الاستخدام الطويل، ولم يجرِ الفريق بعد اختبارات منهجية للأداء على فترات ممتدة. يرى المؤلفون أن خوارزميات تتبع أكثر قوة أو دمج مكوناتهم مع مقوّمات قوة حديثة قائمة على التعلم العميق قد يعزّز الدقة والموثوقية، بينما ينبغي لتقدّم الطباعة الثلاثية الأبعاد أن يتيح مزيدًا من التصغير وتصميم رؤوس أصابع يمكن تعقيمها وتصبح قابلة للاستخدام كقطع استهلاكية في الجراحة أو المختبرات.
ماذا يعني هذا للروبوتات اليومية
بعبارات بسيطة، يُظهر هذا العمل أن يدًا روبوتية صغيرة ورخيصة يمكنها أن ترى وتشعر بمراقبة مدى انحناء أصابعها الناعمة. مع بيانات معايرة متواضعة وأجزاء متاحة تجاريًا، يقدّر الـ Seezer مقدار الضغط واتجاه القوى والعزوم المؤثرة بدقة كافية لمهام التعامل اللطيف. إذا تحسّنت متانته، يمكن أن يساعد نفس النهج الروبوتات المستقبلية على التعامل مع عناصر صغيرة وهشة—مثل الأجهزة الطبية والإلكترونيات والفواكه، أو حتى الأنسجة في جراحة طفيفة التوغل—دون مجسات ضخمة أو أجهزة معقّدة، مذكياً اللمس الحساس إلى أماكن تُعدّ فيها المساحة والتكلفة عوامل محددة.
الاستشهاد: Duverney, C., Gerig, N., Hüls, D. et al. Affordable 3D-printed miniature robotic gripper with integrated camera for vision-based force and torque sensing. npj Robot 4, 10 (2026). https://doi.org/10.1038/s44182-026-00075-2
الكلمات المفتاحية: مشبك روبوتي ناعم, استشعار القوة عبر الرؤية, روبوتات مطبوعة ثلاثيًّا, التلاعب الميكروي, ردود حركية لمسية