Clear Sky Science · ar
تقدّم الروبوتات اللينة: تقدمات حديثة في مشغلات المطاط العازل والسوائل العازلة
روبوتات لينة تتحرك بشكل أقرب إلى العضلات
تخيل روبوتاً يمكنه احتضان طفل بأمان، أو الانزلاق عبر أنقاض مبنى منهار، أو تدليك قلب متضرر برفق. لتنفيذ مثل هذه المهام، يجب أن تنحني الآلات وتمتد كما تفعل الأنسجة الحية، لا أن تصدر صريراً مثل المعدن. تشرح هذه الورقة الاستعراضية كيف أن فئة جديدة من "العضلات الكهربائية اللينة"—المصنوعة من مواد مطاطية وصلبة وسوائل—تقرّب هذه الرؤية من الواقع، وما التحديات المتبقية قبل أن تنتقل من المختبر إلى الحياة اليومية.
من المحركات الصلبة إلى العضلات الكهربائية اللينة
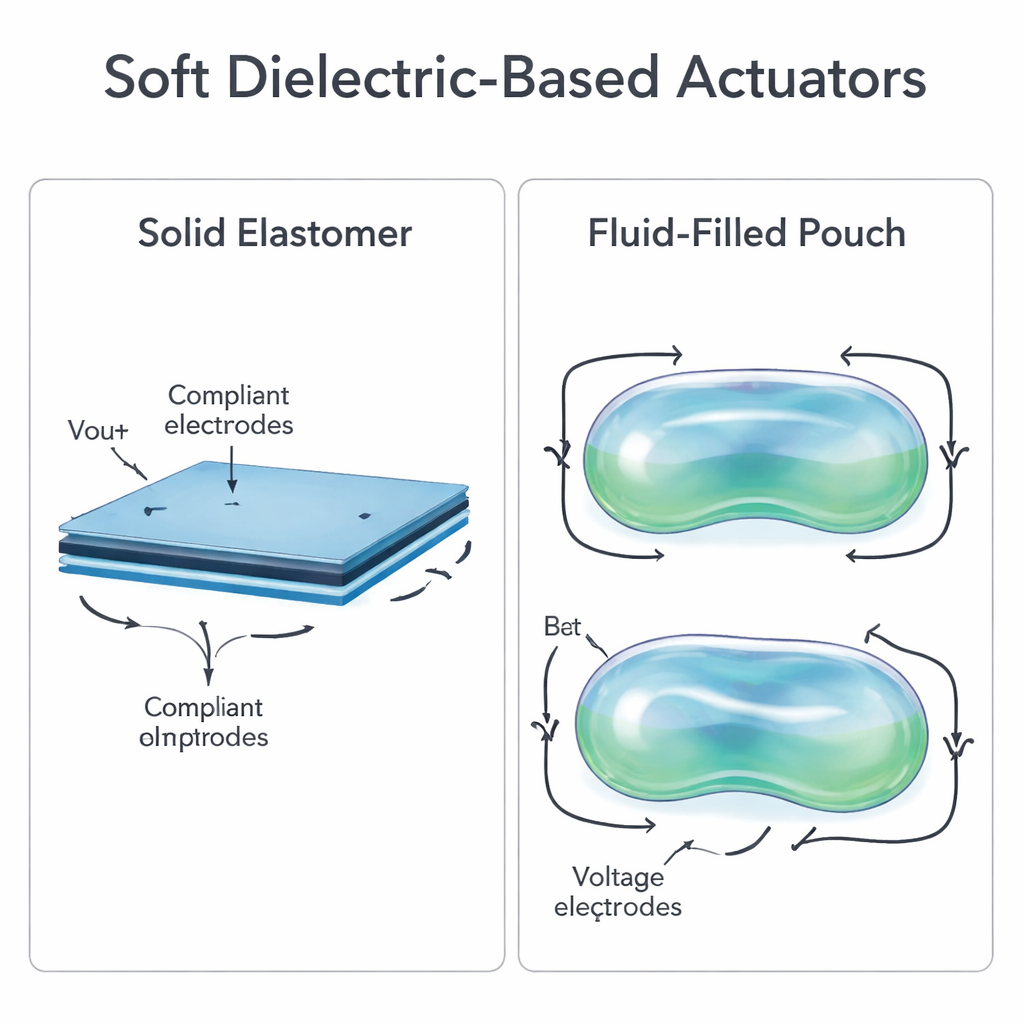
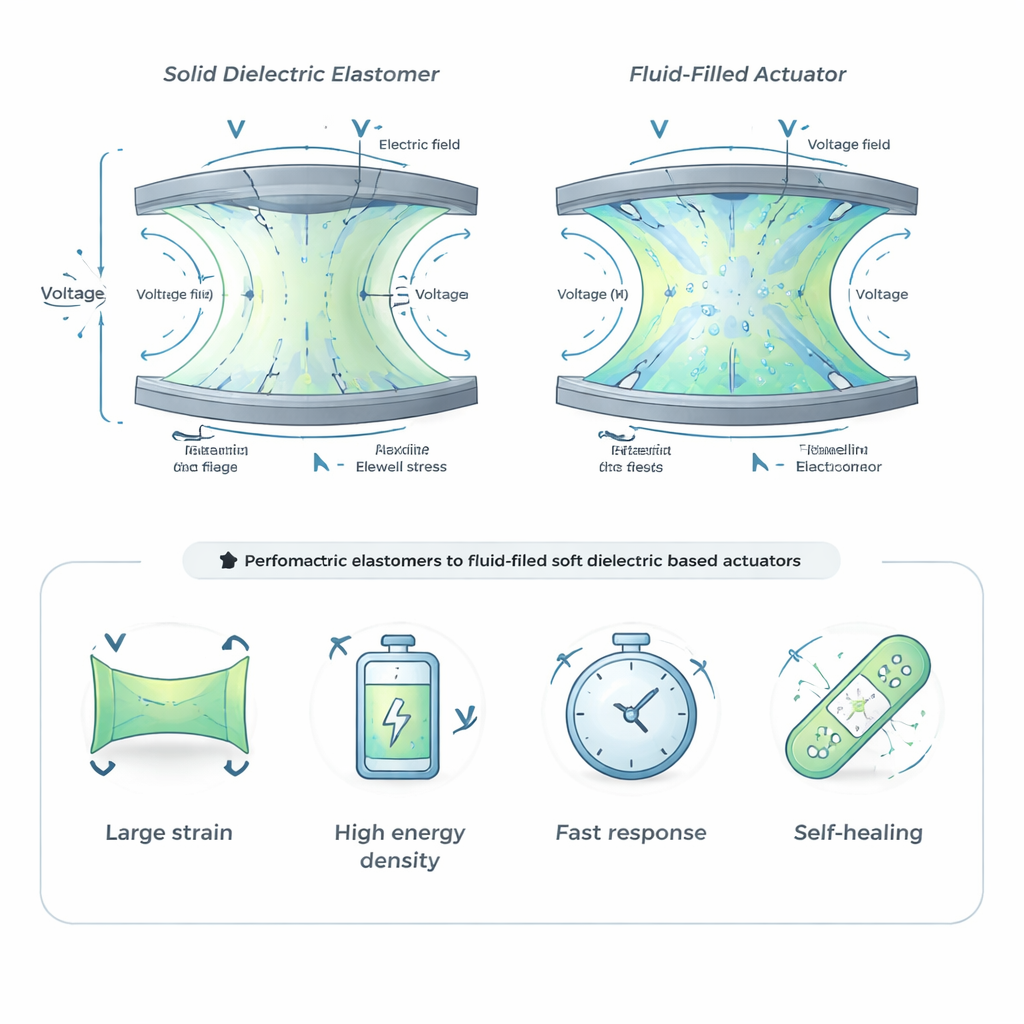
تعتمد معظم الروبوتات الصناعية على محركات وأسنان تروس ثقيلة وصلبة. فهي قوية ودقيقة، لكنها أيضاً مكلفة وهشة وقد تكون خطرة بالقرب من الناس. تتخلى الروبوتات اللينة، المبنية من مواد مطاطية مرنة مشابهة لأوعية الخَبز السيليكونية أو أربطة المطاط، عن القوة الجسيمة لصالح اللطف والمرونة والقدرة على التكيّف. يركز هذا المقال على المشغلات اللينة التي تعمل بالكهرباء: مشغلات المطاط العازل (DEAs)، التي تستخدم طبقة مطاطية صلبة، ومشغلات السوائل العازلة (DFAs)، التي تستخدم سائلاً عازلاً كهربائياً مختوماً في جراب مرن. في كلتا الحالتين، يؤدي تطبيق فرق جهد بين قطبين مرنين إلى ضغط المادة عبر قوى كهروستاتيكية وتحويل الطاقة الكهربائية مباشرة إلى حركة مع إجهاد كبير، وكثافة طاقة عالية، واستجابة سريعة.
كيف تجعل المواد العضلات تعمل
لكي تتصرف هذه الأجهزة كالعضلات المفيدة، فإنها تحتاج إلى مواد ذات خصائص محددة جداً. بالنسبة لمشغلات المطاط العازل، يجب أن تكون الطبقة المطاطية المركزية لينة للغاية حتى تتمدد بسهولة، وفي الوقت نفسه تتحمل مجالات كهربائية عالية دون تمزق أو قصر كهربائي. يوازن الباحثون بين هذين المتطلبين باستخدام استراتيجيتين رئيسيتين. الأولى تصميم بوليمرات جديدة—من الأكريليكات والسيليكونات واليوريثانات إلى كوبوليمرات كتل أكثر غرابة—تحوي مجموعات كيميائية قطبية كثيرة (تعزز الاستجابة الكهربائية) داخل شبكات مرنة منخفضة الصلابة. والثانية إنشاء مركبات بخلط جزيئات أو سوائل دقيقة تزيد من قدرة المادة على تخزين الطاقة الكهربائية. ويقود تفكير مماثل تصميم مشغلات السوائل العازلة: يختار المهندسون زيوتاً وسوائل عازلة أخرى ذات لزوجة واستقرار وتوافق ملائم مع أغلفة بلاستيكية أو سيليكونية رقيقة، بحيث يمكن للجهد دفع السائل بسرعة لخلق انتفاخات وضربات واهتزازات دون تسريبات أو تحلل كيميائي.
بناء وتشغيل المشغلات اللينة على نطاق واسع
تحويل هذه المواد المبتكرة إلى أجهزة موثوقة هو تحدٍ هندسي بحد ذاته. غالباً ما تتضمن طرق التصنيع التقليدية خطوات يدوية مرهقة: شد أفلام رقيقة على إطارات، طلاء أو طباعة أقطاب ناعمة، تكديس طبقات، وفي حالة مشغلات السوائل حقن السائل وختم الجراب. تستعرض الورقة طرق تصنيع أحدث مثل الطباعة النفاثة والطباعية، بثق عضلات شبيهة بالألياف، والطباعة ثلاثية الأبعاد متعددة المواد التي يمكنها وضع الأقطاب والمواد العازلة دفعة واحدة. كما تشرح كيف تقود الأشكال المختلفة إلى حركات متنوعة: رقع مسطحة تتسع مساحتها، قبب ترتفع، أسطوانات ملفوفة تنكمش على طولها، وهياكل تنحني أو تهتز. وبما أن هذه المواد قد تتقدم في العمر أو تتسرب أو تفشل بفعل انهيار كهربائي، يلخص المؤلفون دراسات العمر الافتراضي وأوضاع الفشل الشائعة، ويبرزون الدفع نحو تصاميم قادرة على الشفاء الذاتي التي يمكنها التعافي بعد شرارة أو ثقب.
تحكم أذكى واستخدامات ناشئة
مثل العضلات الطبيعية، يجب التحكم بالمشغلات اللينة. ترتكز المخططات البسيطة ذات الحلقة المفتوحة على إدخال نمط فرق جهد، لكن ذلك قد ينحرف مع احمرار المادة أو زحفها. تتضمن الأساليب المتقدمة حسّاسات مدمجة—أو استخدام الإشارات الكهربائية نفسها من المشغل—لقياس الإجهاد أو القوة أو الاهتزاز في الوقت الحقيقي وضبط إشارة التشغيل وفقاً لذلك. يجرب الباحثون الآن متحكمات تعتمد على تعلم الآلة والتعلّم التعزيزي للتعامل مع السلوك غير الخطي والمعتمد على التاريخ للمواد اللينة. وعلى صعيد التطبيقات، تستعرض الورقة مشهداً واسعاً: عضلات صناعية ترفع أضعاف أوزانها، روبوتات تشبه الأسماك والحشرات تسبح أو تطير، أحزمة ومخدات لمسية قابلة للارتداء توفر إحساس لمسي واقعي، عدسات تكبير وجلود تشكيل الضوء مستوحاة من الحبار والعين البشرية، أسطح متغيرة الشكل، وأجهزة طبية مفاهيمية قد تساعد يوماً ما في علاج فشل القلب أو شَلَل الوجوه.
ما الذي لا يزال يفصل بين عروض المختبر والروبوتات في العالم الواقعي
رغم كل وعودها، تواجه هذه العضلات الكهربائية عقبات قبل أن تُمكّن مساعدين منزليين آمنين أو زراعات طبية أو أجهزة قابلة للارتداء على نطاق واسع. يتطلب العديد منها جهود تشغيل بمستويات كيلو فولت، مما يعقّد مسائل السلامة والإلكترونيات. قد تتصلّب المواد أو تجف أو تفشل بعد ملايين الدورات رغم أدائها المتميز في اختبارات قصيرة. التصنيع غالباً بطيء ومتقلب للغاية لإنتاج على نطاق واسع. ولا يزال من الصعب تفكيك أو تدوير معظم البوليمرات الحالية أو تحللها حيوياً. يجادل المؤلفون بأن التقدم سيعتمد على التصميم المشترك عبر المقاييس: مواد لينة جديدة تجمع بين صلابة منخفضة واستجابة كهربائية عالية ومتانة وحتى شفاء ذاتي؛ تصنيع واختبار آلي قائم على البيانات؛ وأنظمة تحكم تستغل الحسّ المدمج وذكاء اصطناعي خفيف الوزن. معاً، قد تمنح هذه التقدّمات روبوتات مستقبلية عضلات ليست فقط قوية وسريعة، بل أيضاً آمنة وقابلة للتكيف ومستدامة.
الاستشهاد: Molla, M.H.O.R., Chen, J. & Xu, C. Advancing soft robotics: recent progress in dielectric elastomer and fluid actuators. npj Robot 4, 17 (2026). https://doi.org/10.1038/s44182-026-00074-3
الكلمات المفتاحية: الروبوتات اللينة, مشغلات المطاط العازل, مشغلات السوائل العازلة, عضلات صناعية, واجهات اللمس الحسي