Clear Sky Science · ar
التحكم التنبؤي القائم على اللعبة للمساعدة التفاعلية المخصصة والمستهدفة
روبوتات تشعر وكأنها شركاء تدريب جيدون
تخيل شريك تمرين أو معالجًا طبيعيًا يعرف دائمًا متى يساعدك في الرفع، ومتى يتركك تكافح قليلًا، ومدى السرعة التي تخطط للتحرك بها لاحقًا. تُظهر هذه الورقة كيف نمنح الروبوتات التي تلامس الجسم—مثل الهياكل الخارجية المستخدمة في التأهيل أو المصانع—نوعًا مماثلاً من البديهة. من خلال "تخمين" رياضي لنوايا حركة الشخص خلال ثانية أو اثنتين قادمتين، يمكن للروبوت مشاركة الجهد بسلاسة، وتقليل التعب، وتوجيه كيفية تحرك وتعلّم الأشخاص بشكل دقيق ودقيق.
لماذا مشاركة الجهد مع الروبوتات صعبة
عندما يرتبط الروبوت جسديًا بشخص—مساعدًا إياه على تحريك طرف أو حمل جسم ثقيل—فكلاهما يدفع ويتفاعل باستمرار. المتحكمات الروبوتية التقليدية تتجاهل في الغالب ما يخطط له الإنسان؛ فهي تسعى فقط لتحقيق أهداف أداء مثل الدقة أو توفير الطاقة. هذا قد يجعل الروبوت جامدًا ومتحكمًا للغاية، أو خاملًا وغير مفيد. الشركاء البشر الحقيقيون أفضل: فهم يشعرون بكيفية حركة الآخر، ويتكيفون مع قدراته، ويشجعون سلوكيات مختلفة، من الاسترخاء إلى الجهد المكثف. يجادل المؤلفون أنه للوصول بالروبوتات إلى هذا النوع من التفاعل، يجب على الروبوت أن يبني نموذجًا صريحًا لكيفية تخطيط الإنسان للحركات وكم الجهد الذي هو مستعد لبذله.
منظور نظرية الألعاب لتفاعل الإنسان والروبوت
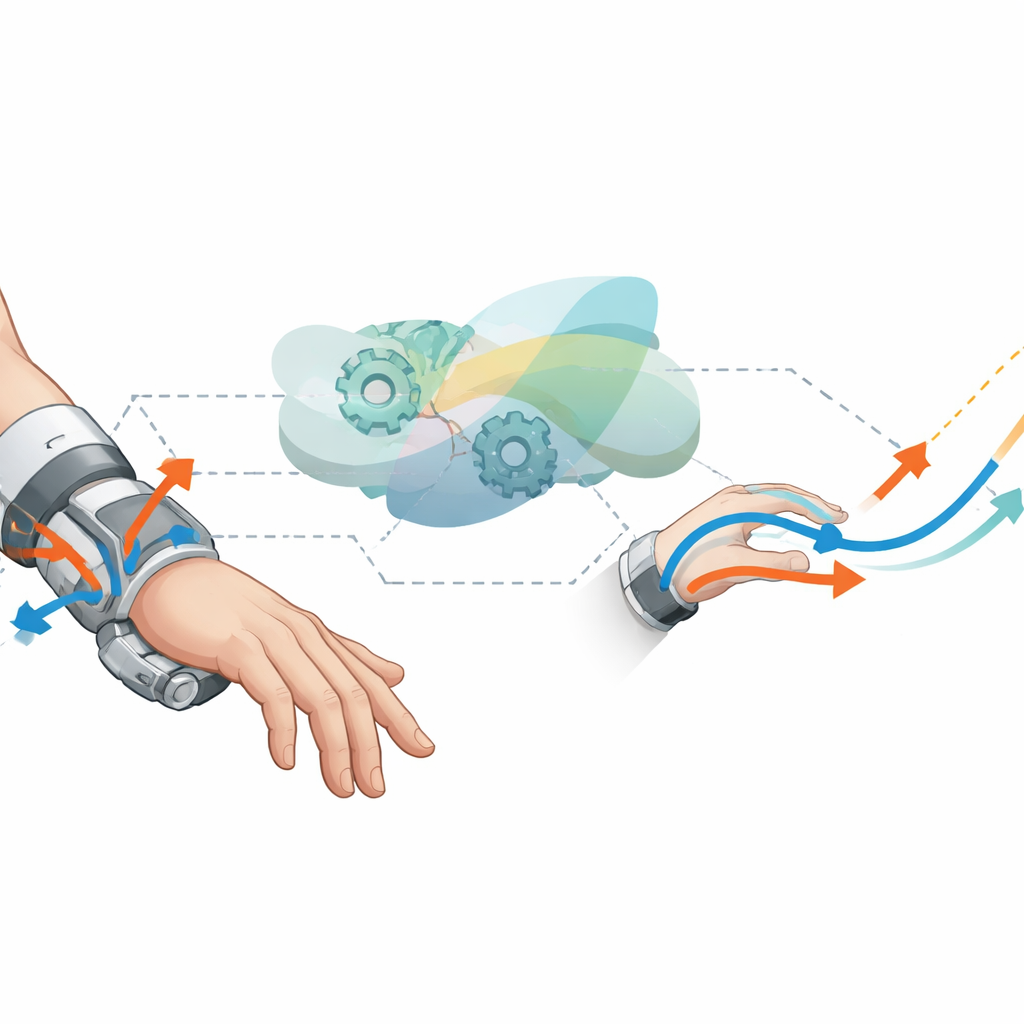
يبني الباحثون على نظرية الألعاب—رياضيات التفاعل الاستراتيجي—باعتبار الإنسان والروبوت "لاعِبين" اثنين يشتركان في نفس المهمة. لكل منهما أهدافه الخاصة: يريد الإنسان تتبُّع الحركة المطلوبة مع إنفاق أقل ما يمكن من الجهد، ويريد الروبوت المساعدة في تتبُّع الحركة مع تقليل جهد الشخص أيضًا. والأهم أن كلاهما يُفترض أنهما ينظران فقط لفترة قصيرة قادمة، نافذة تخطيط محدودة مدتها نحو ثانية إلى ثانيتين، مما يعكس كيفية تخطيط الناس للحركات بشكل طبيعي. داخل هذه النافذة، يستنتج الفريق صيغة مدمجة لتوازن ناش: نمط متوازن من القوى حيث لا يستطيع الإنسان ولا الروبوت تحسين نتيجتهما دون أن يغير الآخر سلوكه. هذا التوازن يحدد مقدار القوة التي يجب أن يبذلها كل منهما في كل لحظة.
تعليم الروبوت قراءة نية الإنسان
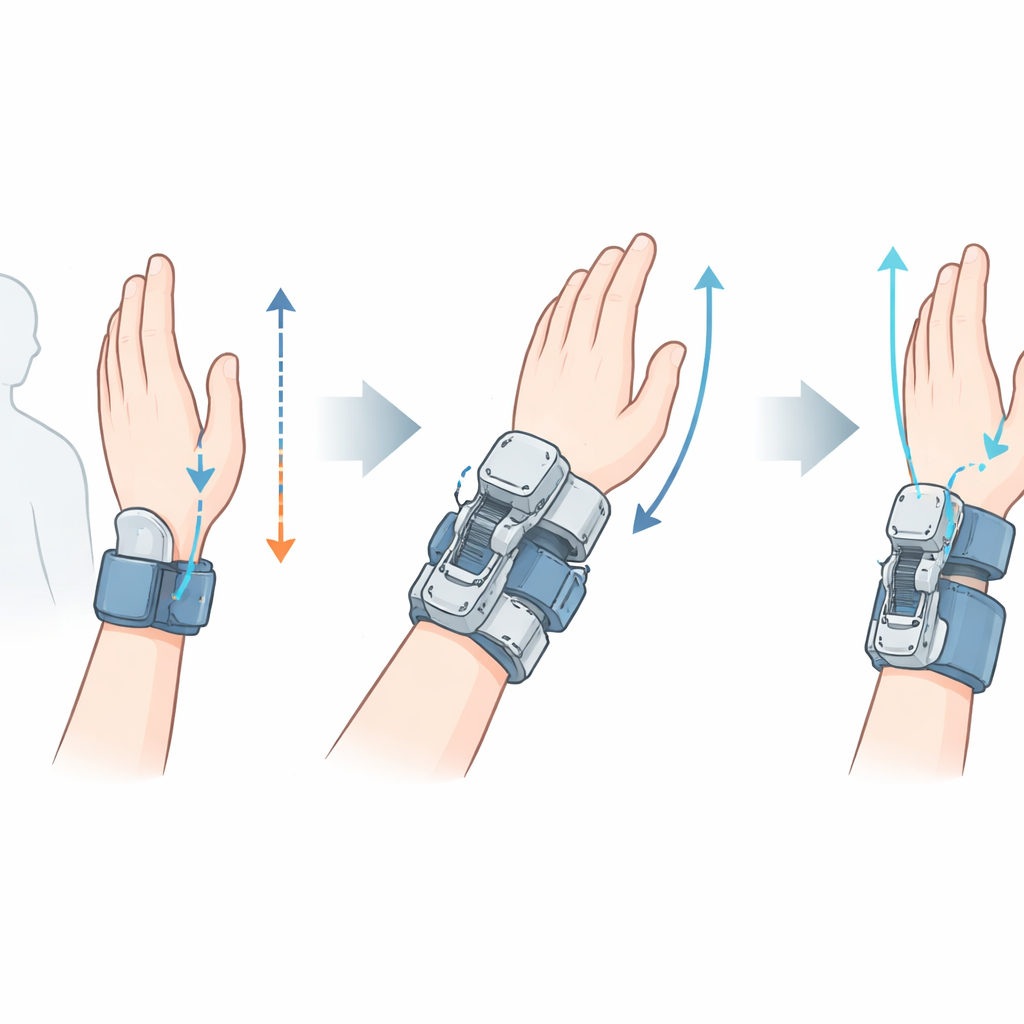
لكي يلعب الروبوت هذه "لعبة الحركة"، يجب أولًا استنتاج مدى اهتمام الإنسان بالدقة مقابل الجهد—تفضيل خفي يختلف من شخص لآخر وحتى عبر الزمن. يحل المؤلفون ذلك بواسطة نهج لعبة عكسية. أثناء حركة الشخص، تقيس المستشعرات زاوية المفصل وعزم القوة الذي ينتجه. ثم يبحث المتحكم مرارًا عن مجموعة تفضيلات الإنسان التي تفسّر أفضل سجل الحركة والقوى الأخير. مع هذه التفضيلات، يتنبأ كيف يحتمل أن يتصرف الإنسان خلال الأفق القصير التالي ويحسب القوة المساعدة المثلى للروبوت. كل هذا يعمل في الزمن الحقيقي على هيكل خارجي للمعصم يساعد المشاركين في تتبُّع هدف متحرك بأيديهم.
البشر والروبوتات يتعلَّمون التنسيق
اختبر الفريق المتحكم مع ثلاثين بالغًا سليمًا في ثلاث تجارب. في الأولى، طُلِب من الناس التبديل بين متابعة الهدف بنشاط والبقاء خاملين. ضبط المتحكم بسرعة تقديره الداخلي لمدى اهتمام الشخص بالدقة، فزاد خلال المراحل النشطة وانخفض قرب الصفر عندما استرخوا. في التجربة الثانية، تناوب المشاركون بين محاولات مع ومَن دون مساعدة روبوتية. مع المتحكم الجديد، قلل الروبوت جهد مفاصل البشر ونشاط العضلات، بينما حسّن دقة التتبُّع. مع تكرار المحاولات، استقر نمط تفاعل كل شخص إلى "توازن" فردي ثابت، وزاد الارتباط بين قوى الإنسان والروبوت—دليل على تزايد الفهم المتبادل. في التجربة الثالثة، قدم الباحثون مقبض مساعدة واحدًا، وهو معلم فوقي يحوّل مدى إصرار الروبوت على تقليل جهد الشخص. تدوير هذا المقبض غيّر بسلاسة مقدار الجهد الذي اختاره البشر للمساهمة، دون إضعاف أداء المهمة.
توجيه السلوك بمقبض واحد
المعلم الفوقي للمساعدة يتيح للمصممين تغطية طيف من أنماط التفاعل بتحكم واحد: من مساعدة شبه معدومة، مرورًا بالمشاركة المتساوية في الجهد، وصولاً إلى دعم شبه كامل حيث يقود الروبوت ويستطيع الإنسان الاسترخاء. عند الإعدادات المتوسطة، مال البشر إلى التنسيق الأفضل مع الروبوت، حيث يتحمل كل منهما نحو نصف الحمل تقريبًا. ظل نمط تفضيلات الإنسان المستنتجة ثابتًا لكل شخص عبر مستويات المساعدة المختلفة—باستثناء عندما قام الروبوت بكل شيء تقريبًا، إذ أصبحت السلوكيات أكثر تجانسًا لأن الناس توقفوا إلى حد كبير عن المشاركة. هذا يبيّن أن الروبوت يمكنه كشف أساليب التحكم الفردية ودفعها بلطف، مثلاً بطلب من المستخدمين بذل المزيد في مرحلة تدريبية معينة وأقل في أخرى.
ماذا يعني هذا للتأهيل والعمل
للقارئ العادي، الرسالة الرئيسية أن هذا المتحكم يجعل الروبوتات تتصرف أكثر كشركاء أذكياء بدلاً من آلات جامدة. من خلال التنبؤ بكيفية نيتنا في التحرك وتعديل مستوى المساعدة، يمكن للروبوتات تقليل جهدنا عند الحاجة، وتشجيعنا على العمل بصورة أكبر عندما يكون ذلك مفيدًا، والحفاظ على دقة وثبات الحركة. يمكن ضبط نفس الإطار الرياضي لإعادة التأهيل—نقل الجهد تدريجيًا من الروبوت إلى المريض—أو للتصنيع التعاوني حيث يتشارك البشر والروبوتات الأحمال بأمان وكفاءة. في جوهرها، تظهر الدراسة أن الناس يتكيفون طبيعيًا مع روبوت "يلعب نفس اللعبة" التي يلعبونها هم، مما يفتح الباب لأنماط مساعدة تفاعلية أكثر تخصيصًا واستهدافًا.
الاستشهاد: Hafs, A., Farr, A., Verdel, D. et al. Model predictive game control for personalized and targeted interactive assistance. Commun Eng 5, 57 (2026). https://doi.org/10.1038/s44172-026-00605-8
الكلمات المفتاحية: التفاعل بين الإنسان والروبوت, مساعدة الهياكل الخارجية, التحكم بنظريات الألعاب, إعادة تأهيل حركي, التحكم المشترك