Clear Sky Science · ar
شبكة تداخلية تعزز الاستجابة في السلوك الجمعي
كيف تبقى حشود الحيوانات متزامنة بدقة
غالباً ما تبدو مجموعات الحيوانات الكبيرة وكأنها تنقلب أو تتملص أو تهرب كما لو كانت مخلوقاً واحداً. تستكشف هذه الورقة كيف تسمح البنية الخفية لـ«من يتبع من» داخل مجموعة من الأسماك — وداخل أسراب روبوتية مستوحاة منها — للجمع كله أن يتفاعل بسرعة وبثقة عندما تتغير الظروف.
طبقات التوجيه داخل حشد متحرك
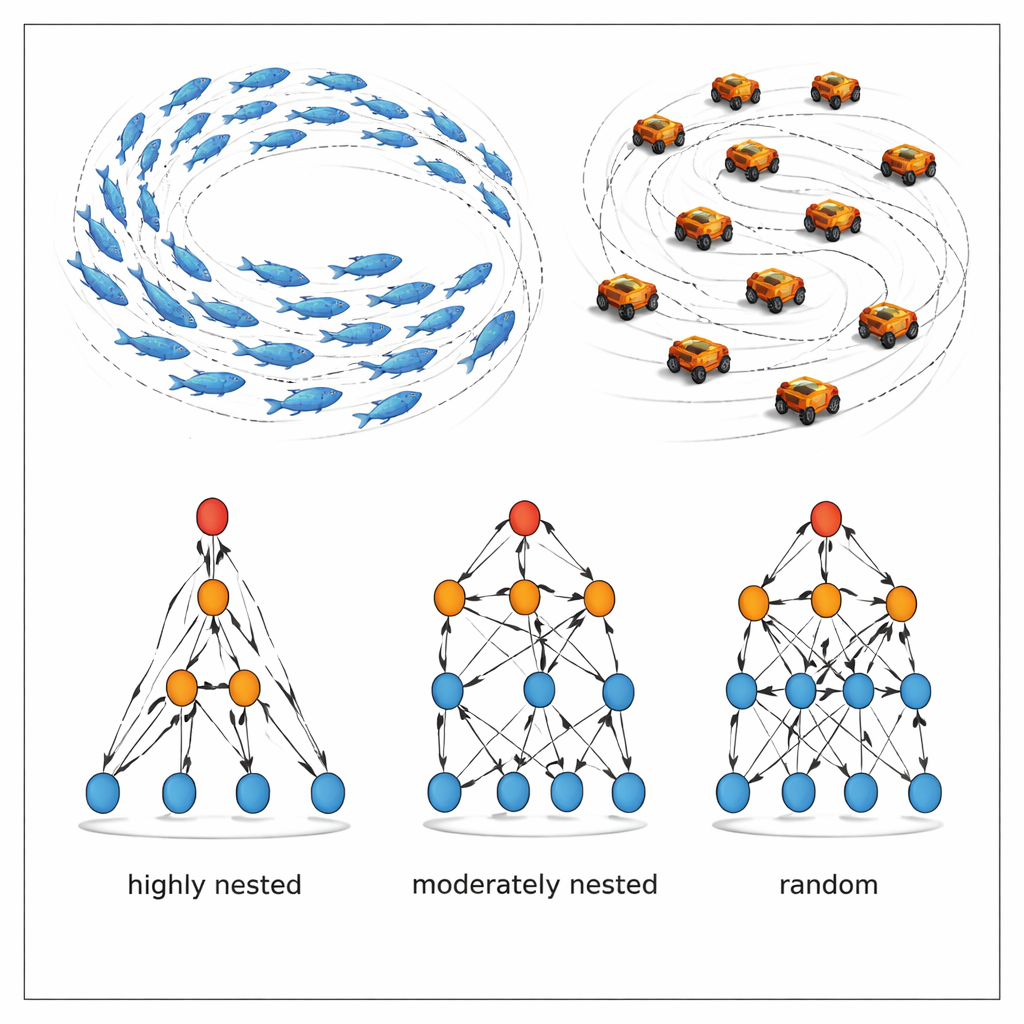
عندما نراقب سرب أسماك يلوح مبتعداً عن الخطر، قد نميل للاعتقاد أن كل سمكة تقليد جيرانها في آن واحد. يظهر المؤلفون أن الواقع أكثر دقة: هناك نمط غير مرئي من التوجيه حيث يؤثر بعض الأسماك على الكثيرين، بينما يتبع بعضهم بشكل أساسي. هذا النمط ليس ترتيباً صارماً، بل هو شبكة مرنة من روابط قائد–تابع تتغير مع نوع الحركة التي يؤديها الجماع. الميزة الهيكلية الرئيسية التي ركز عليها الباحثون تُسمى «التداخل الهرمي»: القادة في المستويات العليا لا يوجهون فقط أتباعهم المباشرين، بل يوجّهون أيضاً بطريقة غير مباشرة العديد من الأسماك في المستويات الأدنى من السلسلة.
ما تكشفه أسراب الأسماك عن المناورات السريعة
صور الفريق أسراباً صغيرة من سمك التترا ذات الأنف الأحمر وهي تسبح في حوض دائري ضحل، متتبعين موقع واتجاه كل سمكة عبر الزمن. من هذه المسارات أعادوا بناء من يميل إلى التحرك أولاً ومن يميل إلى التفاعل لاحقاً، فأنشأوا شبكة موجهة للتأثير لكل مجموعة. كما قاسوا مدى حدة انحناء السرب (الانحناء) ومدى تماسك اتجاهات الأسماك (الاستقطاب). وجدوا أنه عندما يؤدي السرب مناورات سريعة ومتقطعة مع تغييرات متكررة في الاتجاه، كانت الشبكة الأساسية شديدة التداخل الهرمي: عدد قليل من الأسماك يؤثر على كثيرين، وكان نمط التأثير يشبه شلالاً مثلثياً منظمًا. بالمقابل، عندما انزلق السرب بثبات في اتجاه واحد، كانت الشبكة أقل تداخلاً وأكثر مساواة، رغم بقاء الأسماك متراصفة جيداً.
اختبار تدفق المعلومات في شبكات مثالية
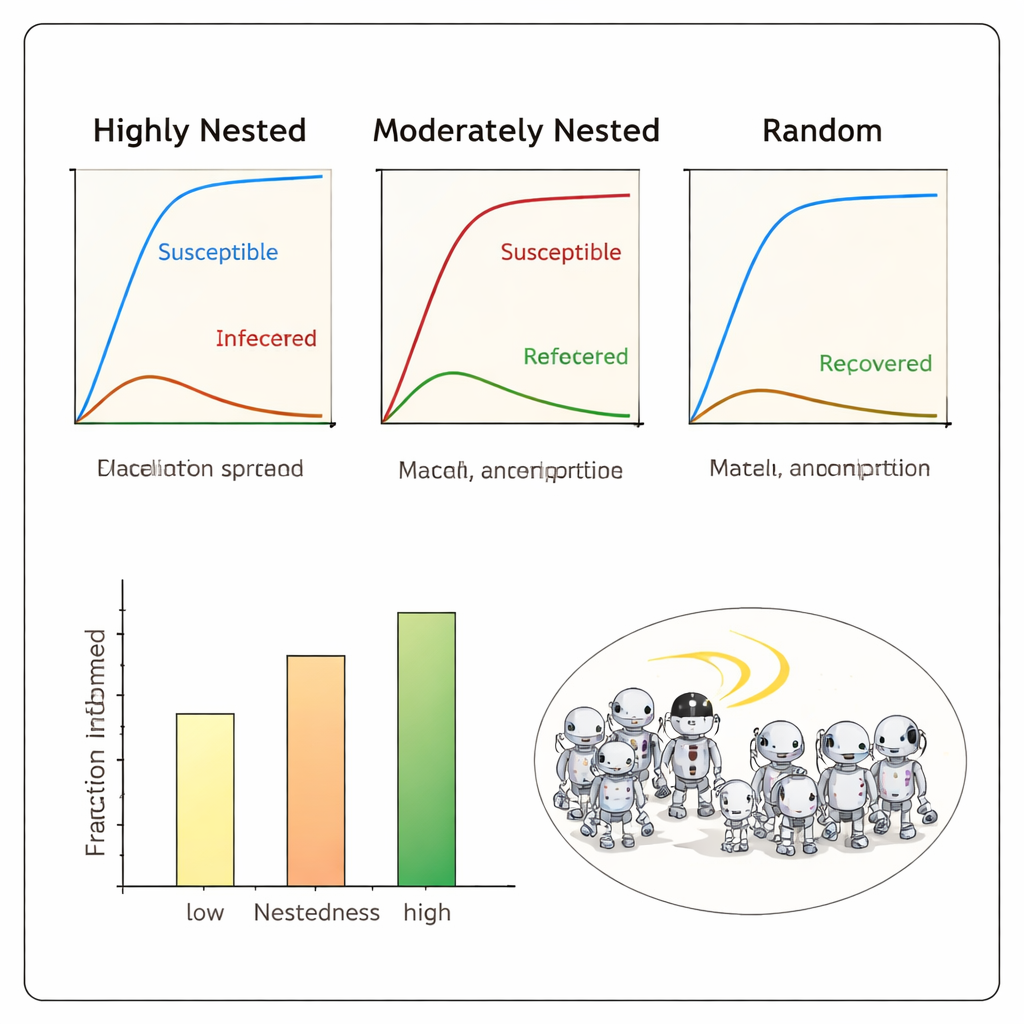
لفهم لماذا قد تساعد البنى المتداخلة، لجأ المؤلفون إلى نموذج انتشار بسيط يُستخدم غالباً في أمراض الأوبئة. هنا، يصبح العقدة «مصابة» بمعنى أنها التقطت إشارة اتجاهية وتقوم بنقلها، وليس مرضاً. قارنوا شبكات قائد–تابع متداخلة تماماً بشبكات متداخلة جزئياً وعشوائية، مع الحفاظ على نفس العدد الإجمالي للاتصالات. في الحالة الأكثر تداخلاً، وصلت إشارة مزروعة في القمة بسرعة إلى كل عقد تقريباً، وحتى عندما تعافت العقد (توقفت عن النقل) بسرعة نسبياً. مع عشوائية الشبكة وتناقص التداخل، توقفت الإشارة: بقيت العديد من العقد غير مُطلعة، وانخفض عدد الناقلين النشطين في الذروة، واحتاج النموذج إلى مصادر إشارة أولية أكثر بكثير لتحقيق نفس التغطية.
من المعادلات إلى حشود روبوتية دائرية
سأل البحث بعد ذلك ما إذا كانت هذه المزايا الهيكلية تترجم إلى حركة فعلية. بنى المؤلفون نموذج سرب «ذاتي الدفع» حيث يختار كل فرد من يتبعه بناءً على مدى بروز حركة الجار، ولكن مع لمسة: القاعدة تفضل تكوين تسلسل هرمي متداخل، حيث يصبح المحركون الأكثر «بروزاً» قادة لكثيرين. قارنوا هذا المخطط المتداخل تماماً ببديلين شائعين: أحدهما حيث لكل جار نفس الوزن، وآخر حيث تُوزن التأثيرات بسلاسة بحسب إشارات الحركة. في المجموعات المحاكاة المطلوبة لأداء مناورات متكررة وكبيرة يوجهها عدد قليل من الأفراد المطلعين، سمح المخطط المتداخل للحشد بمطابقة نمط التوجيه المستهدف بدقة أكبر وبفواصل زمنية أقل، حتى عند إضافة ضوضاء كبيرة للحركة.
روبوتات حقيقية تتصرف مثل أسراب الأسماك
أخيراً، طبق الباحثون تحكماً بالشبكة المتداخلة على خمسين روبوتاً بعجلات تتحرك في ساحة مسطحة. في مهمة «التحويم»، حاول روبوت مطلع واحد إبقاء المجموعة تدور حول منطقة. مع قاعدة الجار الموزون التقليدية، كان مسار السرب ناعماً وبطيئاً، مُظهرًا انحناءات خفيفة فقط. مع القاعدة المتداخلة، نفّذت الروبوتات انعطافات أشد وأكثر حسمًا، متتبعة تغييرات الروبوت المطلع عن كثب. في مهمة «المتابعة»، حيث قام روبوت مطلع بتحولات اتجاهية غير متوقعة، بقي السرب الذي يعمل بالقاعدة المتداخلة أقرب مرة أخرى سواء في الموضع أو الاتجاه، بينما سلك السرب المقارن مسارات ملسّاة أو فاته كثير من الانعطافات.
لماذا يهم هذا خارج نطاق الأسماك والروبوتات
بعبارات يومية، تُظهر الدراسة أن كيفية توصيل الحشد تُهم بقدر حساسية أفراده. شبكة تأثير متداخلة بشدة — سلسلة طبقية حيث يصل قادة المستويات العليا إلى عدد كبير من الآخرين — تتيح للمجموعات أن تتفاعل بسرعة وبثقة مع الإشارات المهمة، دون أن تغمرها الضوضاء. قد تساعد هذه الرؤى علماء الأحياء على تفسير أسراب الحيوانات، وتوجيه تصميم فرق الطائرات من دون طيار أو الروبوتات المائية التي يجب أن تستجيب بسرعة في بيئات خطرة، وحتى إلقاء الضوء على كيفية تنظيم الشبكات البشرية عندما تكون الأعمال السريعة والمنسقة ضرورية.
الاستشهاد: Zheng, Z., Tao, Y., Xiang, Y. et al. Nested interaction network enhances responsiveness in collective behavior. Commun Phys 9, 75 (2026). https://doi.org/10.1038/s42005-026-02510-0
الكلمات المفتاحية: السلوك الجمعي, تشكيل أسماك, روبوتات السرب, نقل المعلومات, هرمية الشبكة