Clear Sky Science · ar
تقدير كيرنل الضبابية الكمي من علامات المرور باستخدام استجابة التردد المكاني للحافة المائلة كمقياسحدة للحدة
لماذا تهم كاميرات السيارات الضبابية
تعتمد السيارات الحديثة بشكل متزايد على الكاميرات لاكتشاف المشاة وقراءة إشارات المرور والحفاظ على بقاء المركبات داخل المسار. لكن مثل البصر البشري، يمكن أن يتدهور بصر الكاميرا تدريجياً مع الزمن أو بفعل الحرارة والاهتزاز أو تحركات صغيرة أثناء التجميع. تستعرض هذه المقالة طريقة جديدة «لقياس» مدى ضبابية كاميرا السيارات من خلال النظر إلى علامات المرور اليومية، مما قد يتيح لصانعي السيارات مراقبة حالة الكاميرا عبر الزمن بدلاً من الانتظار لحدوث أعطال.
تحويل علامات المرور إلى مخططات اختبار
في المصانع، تُفحص حدة الكاميرا بواسطة أنماط اختبار خاصة قبل شحن الوحدة. أما على الطريق فلا يوجد هدف خاضع للتحكم—فقط العالم الحقيقي. يستغل المؤلفون كائنًا واحدًا شائعًا ومتكررًا في هذا العالم: علامات المرور ذات الحواف النظيفة وعالية التباين. يركزون على مقياس شيوعي للحدة يُسمى استجابة التردد المكاني (SFR)، والذي يخبرك أساسًا بمدى قدرة الكاميرا على الحفاظ على التفاصيل الدقيقة في الصورة. من خلال تحليل الحواف المائلة قليلاً على علامات المرور، يمكنهم حساب SFR بطريقة مماثلة للاختبارات المعملية، لكن مباشرة من مشاهد القيادة الحقيقية.

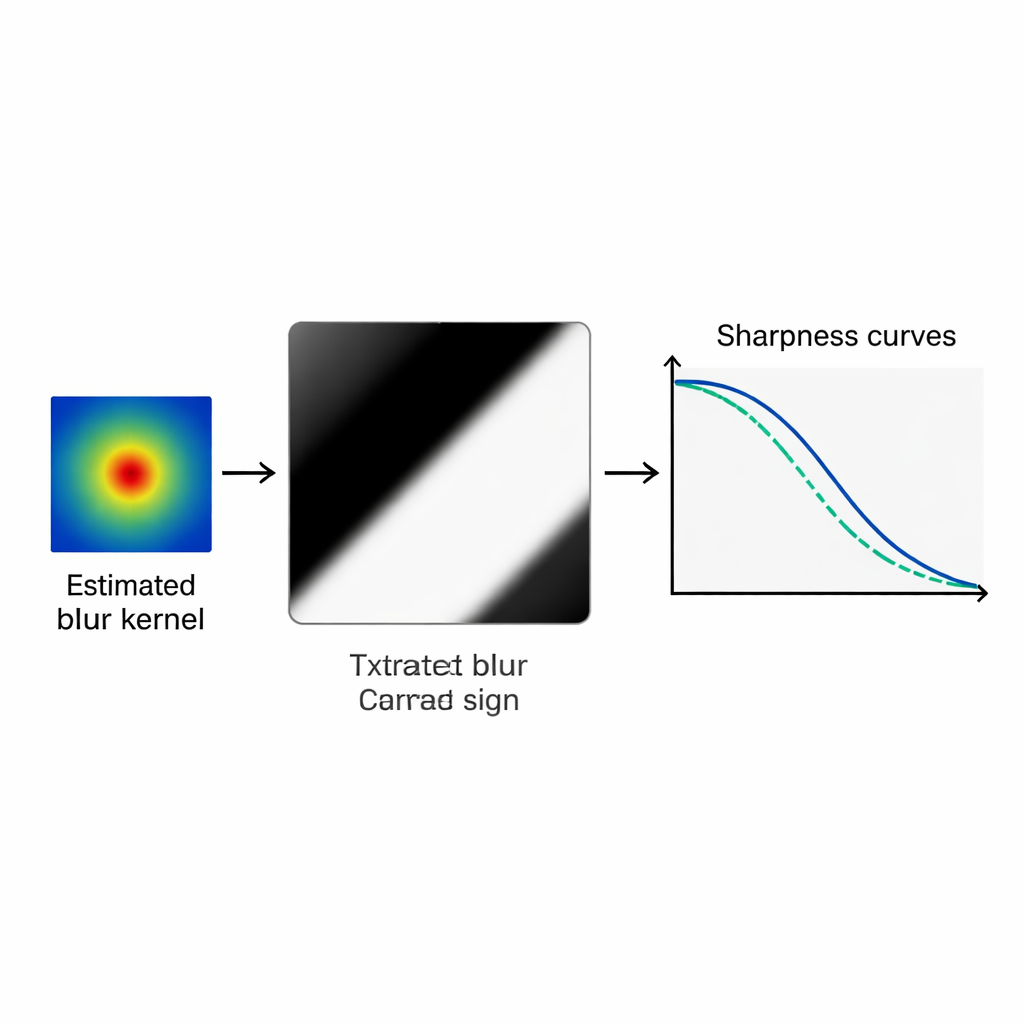
التقاط كيفية انتشار الضوء عبر العدسة
يمكن وصف الضبابية في الكاميرا بصورة صغيرة تُسمى كيرنل الضبابية، أو دالة انتشار النقطة. تُظهر هذه الصورة كيف ينتشر الضوء القادم من نقطة واحدة في المشهد عبر البيكسلات المجاورة على المستشعر. عادة ما يكون تقدير هذا الكيرنل مباشرة من صورة ضبابية أمراً صعباً للغاية، لأن مجموعات عديدة من الصور الحادة وأنماط الضبابية يمكن أن تنتج نتيجة متشابهة. لمواجهة ذلك، يستخدم الباحثون أولاً برامج تصميم ضوئية لمحاكاة حوالي 1300 كيرنل ضبابية واقعية لكاميرا سيارات محددة عبر إعدادات تركيز ومواقع مختلفة في الصورة. ثم يضغطون هذه المجموعة الكبيرة إلى مجموعة مدمجة من الأنماط الرئيسية باستخدام أداة إحصائية تُسمى تحليل المكونات الرئيسية (PCA)، بحيث يمكن وصف أي ضبابية واقعية بعدد قليل من القيم بدلاً من مئات قيم البيكسل.
مطابقة منحنيات الحدة بدل البيكسلات
بمجرد بناء «قاموس» الضبابية المدمج، تبدأ عملية التقدير الفعلية بلحظتين صغيرتين، كل منهما 45 × 45 بكسل، مأخوذتين من صورة علامة مرور ضبابية، مع لقطات مطابقة من صورة مرجعية حادة لنفس العلامة. بالنسبة لكيرنل ضبابية مرشح مأخوذ من نموذج PCA، تُموه اللقطات الحادة اصطناعياً وتُحسب منحنيات SFR الخاصة بها. تُقارن هذه المنحنيات بعد ذلك مع منحنيات SFR المقاسة من اللقطات الضبابية الحقيقية. تضبط طريقة تحسين عالمية معروفة باسم التطور التفاضلي معلمات الكيرنل لتقليل الفرق بين مجموعتي المنحنيات. في الواقع، تبحث الخوارزمية عن نمط الضبابية الذي يجعل منحنيات الحدة الاصطناعية تتطابق بأكبر قدر ممكن مع تلك المقاسة من صورة الكاميرا الحقيقية.
ما مدى فعالية الطريقة؟
اختبر المؤلفون طريقتهم أولاً على بيانات صناعية، حيث يعرفون كيرنلات الضبابية الحقيقية بدقة. عبر عشرة مستويات ضبابية مختلفة، من حاد جداً إلى غير واضح بشكل ملحوظ، تطابقت الكيرنلات المقدرة مع الحقيقة الأرضية عن قرب وفق عدة مقاييس تشابه مستقلة، مع قيم تشابه هيكلي عادة فوق 0.95 وأخطاء متوسطة منخفضة للغاية. كما يقارنون نهجهم بتقنيات «إزالة الضبابية العمياء» الحديثة في رؤية الحاسوب، المصممة أساساً لجعل الصور تبدو أفضل بدلاً من استعادة شكل الضبابية الدقيق. في مهمة إعادة بناء الكيرنل الأساسي بدقة لهذه الكاميرا المحددة، تفوق الأسلوب الجديد المعتمد على PCA بوضوح على هذه الأساليب القياسية. أخيراً، طبقوا الخوارزمية على صور حقيقية من كاميرا سيارات معدلة يمكن تحريك مستشعرها بخطوات صغيرة لإحداث ضبابية معروفة. رغم أن الكيرنلات الحقيقية هنا غير متاحة، أنتجت الكيرنلات المقدرة حوافاً اصطناعية كانت منحنيات حِدتها ومظهرها البصري قريبة جداً من الحواف الضبابية الفعلية عبر نطاق واسع من إعدادات التركيز.
من تقنية مخبرية إلى فحص صحة الكاميرا
بالنسبة لغير المتخصصين، النتيجة الأساسية هي أن المؤلفين يمكنهم الآن تحويل علامات المرور العادية إلى أداة تشخيص تكشف كيف تتغير عدسات كاميرا السيارة عبر الزمن، وليس فقط ما إذا كانت الصورة حادة أو ناعمة. بدلاً من رقم مجرد للنجاح/الفشل، يُشفّر الكيرنل المقدر معلومات مفصلة حول كيفية انتشار الضوء داخل العدسة، والتي يمكن ربطها بدورها بانحرافات التركيز أو عيوب بصرية محددة. بينما الطريقة الحالية ثقيلة حسابياً وتعمل فقط على رقع صغيرة حول الحواف الواضحة، فإنها تشير إلى أنظمة مستقبلية يمكن فيها إرسال صور عرضية من المركبات إلى خادم يتتبع تدهور حدة الكاميرا البطيء. قد يُعلم هذا الصيانة الوقائية، ويدعم أنظمة مساعدة السائق المتقدمة الآمنة، ويساعد في نهاية المطاف على ضمان بقاء «عيون» المركبات الذاتية في حالة جيدة لسنوات الخدمة.
الاستشهاد: Pandey, A., Akhtar, M.Z., Veettil, N.K. et al. Quantitative Kernel estimation from traffic signs using slanted edge spatial frequency response as a sharpness metric. Sci Rep 16, 7387 (2026). https://doi.org/10.1038/s41598-026-40556-w
الكلمات المفتاحية: كاميرات السيارات, حدة الصورة, كيرنل الضبابية, التصوير لعلامات المرور, مراقبة صحة الكاميرا