Clear Sky Science · ar
رسم خرائط دلالية واعية بالأشياء باستخدام دوال كثافة الاحتمال لإعادة التمركز والتخطيط المساري داخل المباني
لماذا تهم الخرائط الداخلية الأذكى
مع انتقال روبوتات المنازل والخدمات من المختبرات إلى الشقق الحقيقية، يجب أن تفعل أكثر من مجرد تجنب الجدران والأثاث. لتكون مفيدة حقًا، ينبغي أن يدرك الروبوت أن السرير عادة ما يشير إلى غرفة نوم، أو أن الثلاجة توحي بوجود مطبخ. تقدم هذه الورقة طريقة جديدة لتمكين الروبوتات من "رؤية" المساحات الداخلية عبر الأشياء التي تحدد كل غرفة، مما يسمح لها بتحديد موقعها واختيار مسارات تتناسب أفضل مع كيفية استخدام البشر لمنازلهم.
رؤية الغرف عبر أشيائها اليومية
تتركز خرائط الروبوت التقليدية إما على الهندسة الصاحية أو على رموز مجردة. خرائط الشبكة المبنية من مسوح الليزر تلتقط الأشكال بدقة، لكنها تصبح كبيرة للتخزين وبطيئة في البحث، وقد تدفع الروبوتات إلى مسارات متصلبة شبيهة بالشبكة. الرسوم البيانية عالية المستوى الممثلة بالغرف والأبواب أسهل في التعامل، لكنها تتخلى عن التفاصيل الدقيقة المطلوبة للقيادة الدقيقة. يجسر المؤلفون هذه الفجوة بتنظيم الخرائط حول الغرف والأشياء الثابتة الأساسية بداخلها — الأسرة، الأرائك، الثلاجات، الطاولات وما شابه. تُحدَّد كل غرفة على مخطط أرضي مسطح، وتحصل كل فئة من الكائنات المهمة على طبقة خاصة بها، بحيث لا تُكتب أنواع الأثاث المختلفة فوق بعضها.
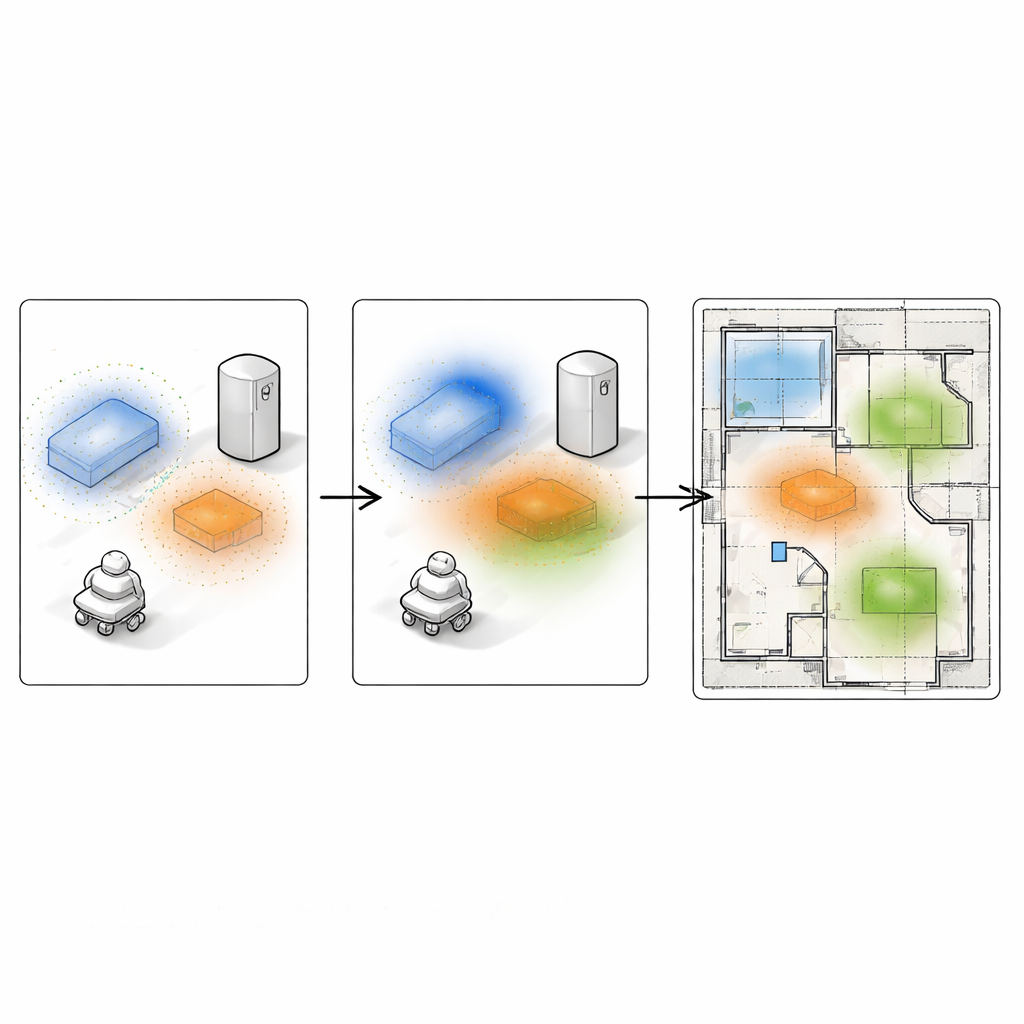
تحويل الأثاث إلى سحب احتمالية ناعمة
بدلًا من رسم كل شيء كمستطيل حاد الحواف، تحول الطريقة المسوحات ثلاثية الأبعاد للأثاث إلى "خرائط حرارية" ناعمة على الأرضية. يعيد الروبوت أولًا بناء كل غرفة ثلاثية الأبعاد باستخدام كاميرا RGB‑D وأدوات قياسية، ثم يوسم نقاط المشهد دلاليًا إلى فئات مثل الجدران أو الأسرة أو الكراسي. لكل نوع كائن داخل الغرفة، تُكتشف مجموعات من النقاط وتُسقط على الأرض. من هذه المجموعات يقدِّر النظام دالة كثافة احتمالية مستمرة — بقعة ناعمة تكون في أقصاها حيث يحتمل أن يكون الكائن وتتلاشى تدريجيًا إلى الخارج. تجميع هذه البقع لكل نوع كائن ينتج خريطة طبقية مدمجة تحتفظ بمعنى الكائنات وشكلها التقريبي، مع معالجة طبيعية للضوضاء والمشاهد الجزئية.
تمكين الروبوتات من إعادة اكتشاف مواقعها
استخدام رئيسي لخريطة المتمحورة حول الأشياء هو مساعدة الروبوت على إعادة تحديد موقعه عندما لا يعرف أين هو على المخطط — وهو مشكلة شائعة عندما يستيقظ الروبوت لأول مرة أو يتم نقله. ينظر الروبوت من جديد بكاميرا العمق، يكتشف الكائنات في المشهد، ويبني مجموعته الصغيرة الخاصة من البقع الاحتمالية للمشهد الجزئي. بعد ذلك، يستكشف خوارزم تطوري العديد من الوضعيات المحتملة للروبوت عبر خريطة المبنى. لكل وضعية مرشحة، تُرصَد البقع المحلية على الخريطة العامة، وتقاس درجة التشابه بينها باستخدام مسافة إحصائية. حدود الغرف وفحوصات خط الرؤية تستبعد الوضعيات المستحيلة، مثل رؤية ثلاجة من خلال جدار. عبر أجيال عدة، تتطور مجموعة الوضعيات المرشحة نحو الموقع الذي تتطابق فيه الأجسام المرصودة أفضل مع حقول الاحتمال المخزنة، مما يعطي تقديرًا قويًا لموضع الروبوت واتجاهه.
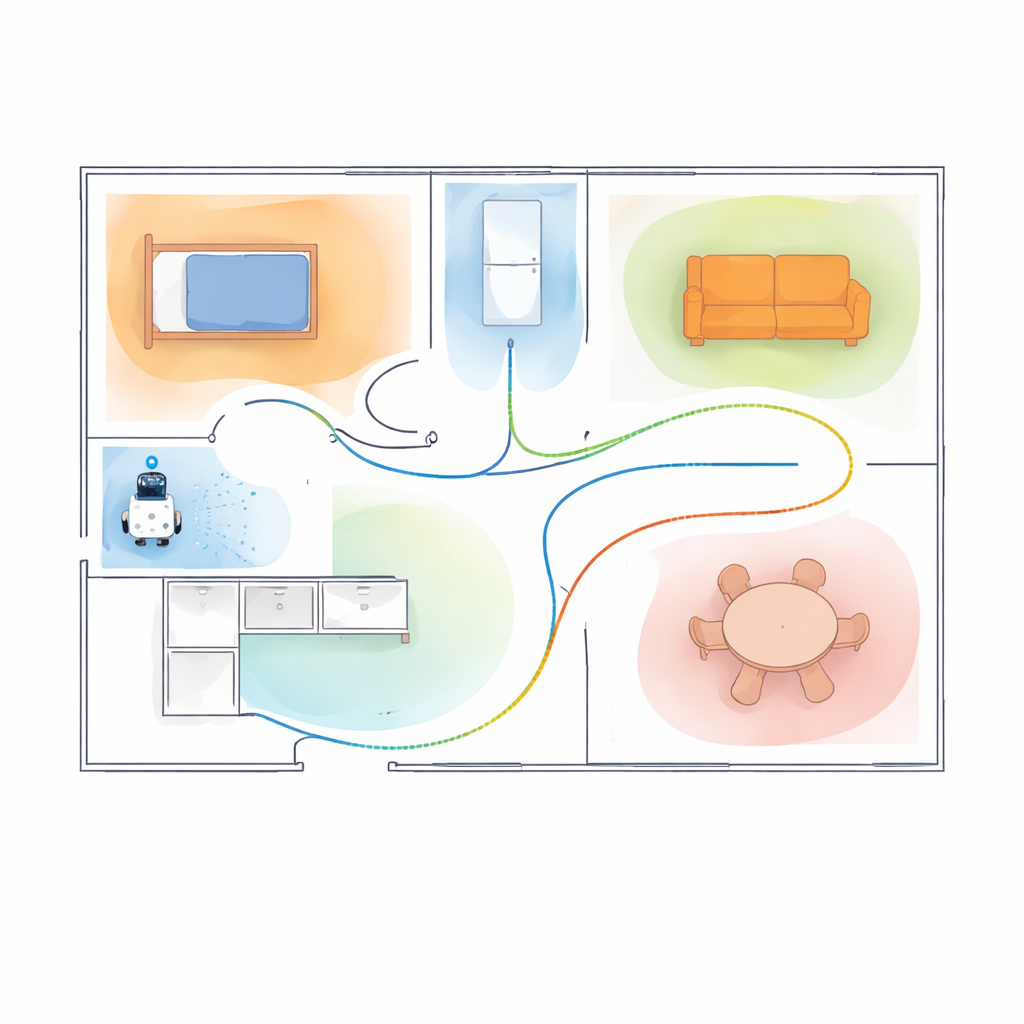
تخطيط مسارات تحترم كيفية استخدام الناس للمساحة
توجه نفس الخريطة أيضًا حركة الروبوت. بما أن كل نوع كائن ممثل كحقل تأثير ناعم، يمكن توجيه الروبوت لتفضيل أو تجنب مناطق معينة عن طريق تعديل أوزان رقمية. قد تصبح الأسرة مناطق يجب الابتعاد عنها ليلًا، بينما يمكن أن تتحول الطاولات إلى مناطق جاذبة عند البحث عن أغراض. تُدمج هذه التفضيلات الدلالية مع خريطة عوائق قياسية وهامش أمان حول الجدران لتشكيل سطح تكلفة واحد فوق المخطط الأرضي. يجد مخطط المسار الكلاسيكي بعد ذلك طرقًا ليست فقط خالية من الاصطدامات بل تتبع أيضًا الانحيازات الاجتماعية أو المتعلقة بالمهمة. تُظهر التجارب على مجموعة بيانات واقعية وشقة مفروشة حقيقية أن هذه المسارات المتحيزة دلاليًا تتبع التفضيلات المقصودة بشكل أفضل، أحيانًا على حساب زيادات طفيفة في طول المسار، وقد تكون أكثر سلاسة في المنازل الحقيقية.
ماذا يعني هذا للروبوتات اليومية
ببساطة، يعلّم هذا العمل الروبوتات أن تنظر إلى المنازل كما يفعل الناس: كغرف تُعرَّف بأثاثها، لا كمربعات فارغة محاطة بجدران. من خلال تغليف كل كائن رئيسي بسحابة احتمالية ناعمة، يمكن لخريطة واحدة مدمجة أن تدعم كل من "أين أنا؟" و"كيف أصل إلى هناك؟" دون الحاجة إلى نماذج منفصلة مخصصة لكل مهمة. تُظهر الاختبارات أن هذه المقاربة تساعد الروبوتات على التوطين بمزيد من الاعتمادية في الغرف المزدحمة أو المتشابهة، وتختار طرقًا تتوافق أفضل مع توقعات البشر. ومع نضج هذه الأفكار، قد تتنقل روبوتات المنازل المستقبلية بأدب وذكاء أكبر، تتحرك في مساحاتنا بوعي يشعر بأنه أقل ميكانيكية بكثير.
الاستشهاد: Mora, A., Mendez, A., Moreno, L. et al. Object-aware semantic mapping using probability density functions for indoor relocalization and path planning. Sci Rep 16, 9450 (2026). https://doi.org/10.1038/s41598-026-40498-3
الكلمات المفتاحية: تَوَطُّن الروبوت الداخلي, رسم خرائط دلالي, ملاحة واعية بالأشياء, خرائط روبوتية احتمالية, تخطيط المسار