Clear Sky Science · ar
التنقل الاحتمالي العميق مع التكيّف أثناء الاختبار للمركبات الاستكشافية الكوكبية الواعية بعدم اليقين
لماذا سلوك قيادة أكثر أمانًا للمركبة مهم
عندما نرسل روبوتات بعجلات إلى القمر أو المريخ، يجب أن تقود عبر الرمال والصخور والمنحدرات دون مساعدة بشرية. تخمين واحد خاطئ حول مدى ليونة الأرض يمكن أن يترك مركبة بمليارات الدولارات عالقة إلى الأبد، كما حدث عندما حوصرت مركبة ناسا Opportunity في رمال مموجة لأسابيع. تقدم هذه الدراسة نهجًا جديدًا يسمح للمركبات "بشعور" مستوى الخطر في الأرض أمامها، واتخاذ طرق أكثر أمانًا، وحتى التعلم من أخطائها أثناء القيادة.
الأرض اللينة كخطر خفي
في عوالم أخرى، لا تكون العقبات الأكثر خطورة دائمًا الصخور الكبيرة أو الهاوية التي تستطيع الكاميرات رؤيتها بسهولة، بل رقع من التربة السائبة التي تبدو ناعمة وخادعة. عندما تدور عجلات المركبة في هذا النوع من التضاريس، تنزلق المركبة أو تتقدم ببطء أكبر بكثير مما هو مأمر به، يُهدر الطاقة، وقد تصبح مشلولة بشكل دائم. تركز أنظمة الملاحة التقليدية بشكل أساسي على المخاطر الهندسية المرئية—ما يبدو عقبة وما لا يبدو كذلك—دون التقاط كامل لكيفية تصرف الأرض تحت العجلات. وفي الوقت نفسه، طرق تعلم الآلة التي تحاول التنبؤ بانزلاق العجلات من الصور والخرائط ثلاثية الأبعاد يمكن أن تخطئ في ظروف غير مألوفة، مثل إضاءة جديدة أو منحدرات أشد، وعادة لا تُصاحب توقعاتها بمقياس لمدى عدم اليقين.
تعليم المركبة تقييم المخاطر
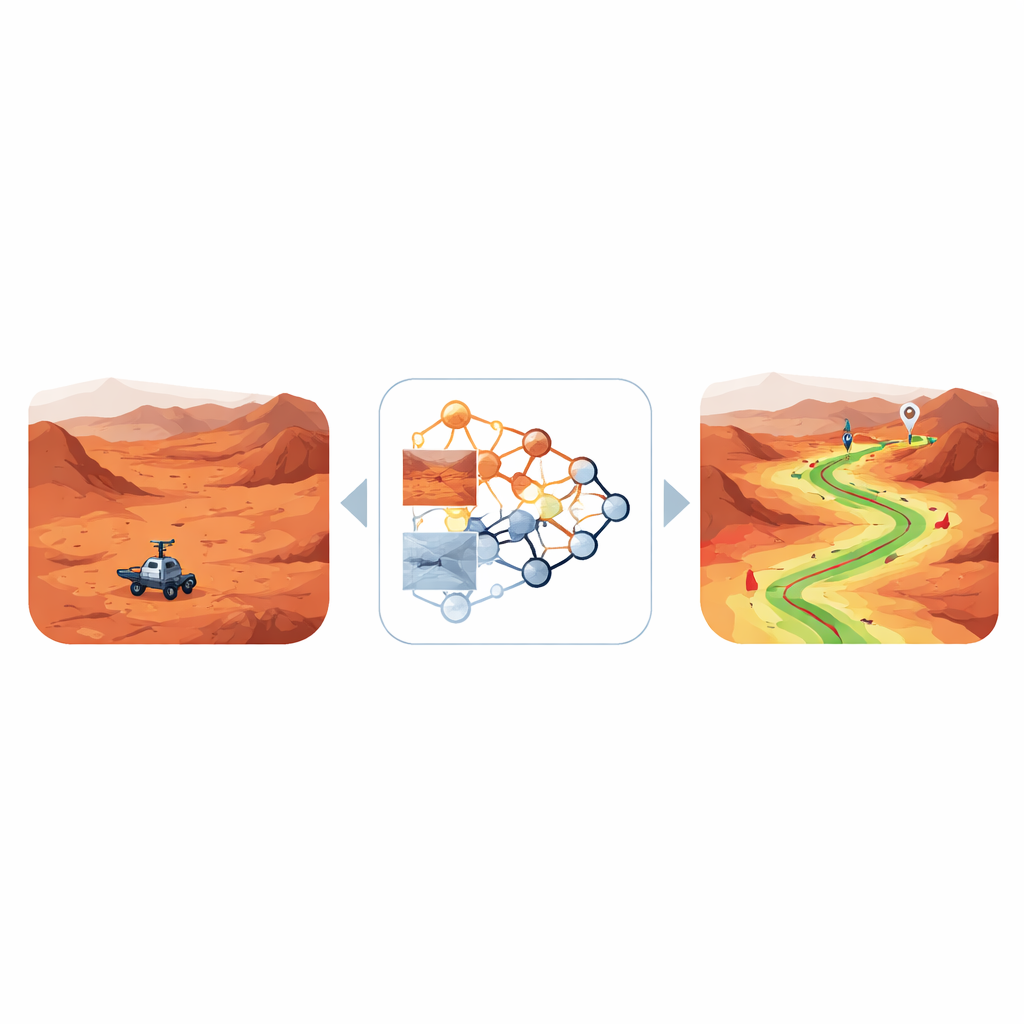
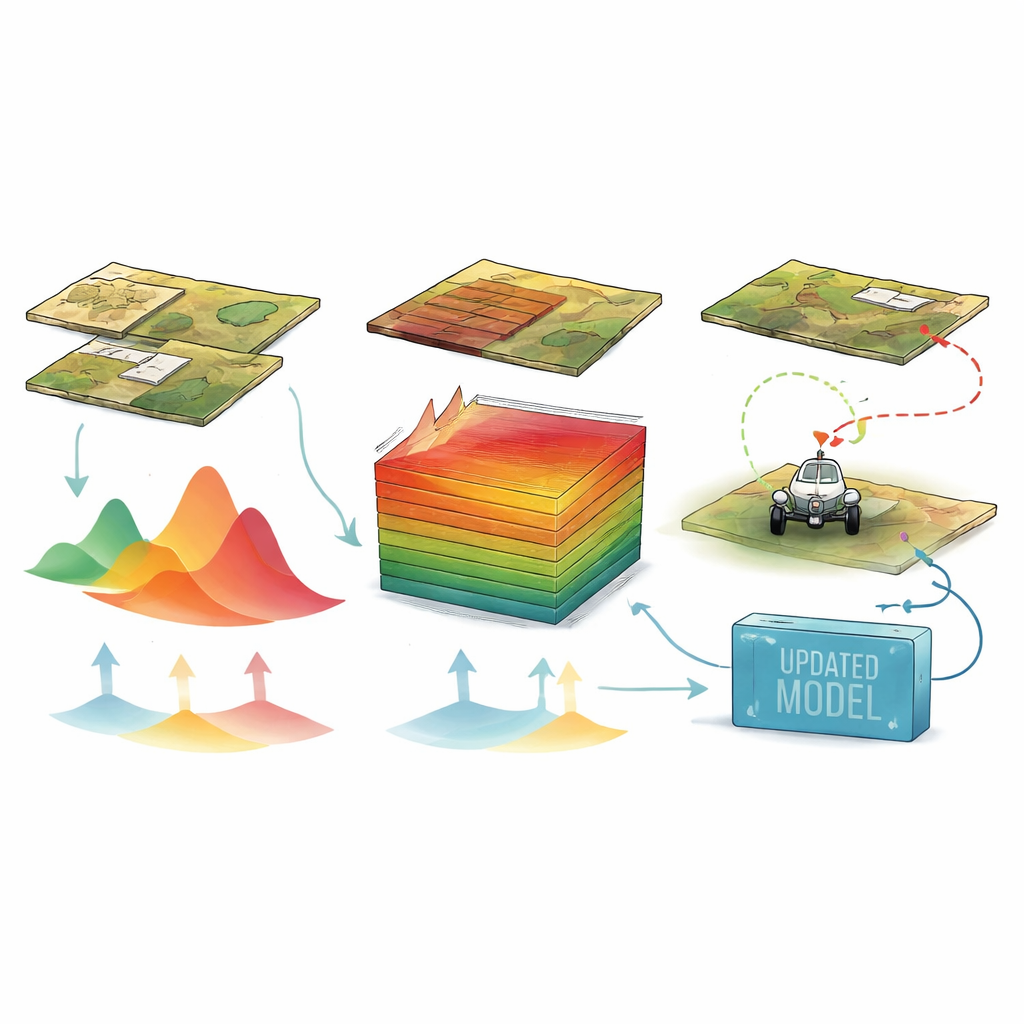
يقترح المؤلفون إطارًا متكاملًا للتعلم والتخطيط يطلقون عليه "العبور الاحتمالي العميق". بدلًا من إنتاج "أفضل تقدير" وحيد لمدى انزلاق العجلات على كل بقعة من التضاريس، يتنبأ نموذجهم بتوزيع احتمالي كامل للانزلاقات الممكنة، بالاعتماد على صور ملونة والانحدار المحلي. يعالج طقم من الشبكات العصبية العميقة المشهد من الأعلى ولكل حركة محتملة على شبكة، يخرج كل من قيمة الانزلاق المتوقعة ومقدار عدم اليقين فيها. من هذا التوزيع، يحول النظام الانزلاق إلى سرعة قيادة فعّالة، وفي النهاية إلى تكلفة زمنية للانتقال لكل خطوة. تحصل المناطق التي يحتمل أن تغوص فيها المركبة على تكاليف عالية جدًا؛ والمناطق التي يكون فيها التنبؤ مُواتيًا وواثقًا تحصل على تكاليف منخفضة. ثم يجد خوارزمية بحث مسار معيارية طريقًا يوازن بين قصر المسافة وتقليل خطر التعطّل.
ترك المركبة تتعلم أثناء السير
تحدٍ رئيسي في الاستكشاف الكوكبي هو أن الظروف التي ترىها المركبة عند الوصول قد تختلف بشكل كبير عن بيانات تدريبها: قد تكون المنحدرات أشد، وخصائص التربة غير مألوفة، أو الإضاءة مختلفة جدًا. لمواجهة ذلك، يتضمن الإطار آلية تكيّف أثناء الاختبار. أثناء قيادة المركبة، تقيس الانزلاق الفعلي الذي تختبره. بعد كل حركة قصيرة، تُستخدم هذه القياسات الطازجة لضبط طبقات "مقياس وإزاحة" مضافة في الشبكات العصبية بلطف مع إبقاء الأوزان الأصلية ثابتة. تتيح هذه الاستراتيجية للنموذج التكيف بسرعة مع تضاريس جديدة باستخدام عدد قليل من الملاحظات، مع الحفاظ على ما تعلّمه سابقًا عن الظروف المألوفة. ثم تُغذى التنبؤات المحدثة مرة أخرى في عملية إعادة التخطيط، بحيث يمكن للمسار المختار أن يتحسن أثناء الحركة.
اختبار النظام بشدة
لأن بيانات المركبات الحقيقية تغطي أنواعًا محدودة فقط من التضاريس، بنى الفريق مجموعة بيانات تركيبية كبيرة لمناظر شبيهة بالمرّيخ. جمعوا تضاريسًا منتجة حاسوبيًا ذات طوبوغرافيا وعرة مع عشر فئات تضاريس مخفية، كل منها لها لون وسلوك انزلاقي خاص، وغيّروا شدة الانحدار واتجاه الإضاءة لخلق سيناريوهات مألوفة وغير مألوفة. في آلاف المهام المحاكاة، قُورِنت الطريقة الجديدة مع مخططين متقدّمين آخرين يتجاهلان عدم اليقين أو يستخدمانه بشكل أقل مباشرة. في الظروف المألوفة، أدت جميع النهوج أداءً متماثلًا إلى حد كبير. لكن في الحالات الأكثر تحديًا—الإضاءة الخافتة والتضاريس الشبيهة بالحفر الحادة—حقق نهج العبور الاحتمالي العميق معدلات نجاح أعلى وانزلاقًا أقصى أقل، مع الحفاظ على أوقات سفر تنافسية. عندما تم تفعيل التكيّف أثناء الحركة، خفض النظام أخطاء التنبؤ أكثر وحسّن الأمان، خصوصًا في البيئات التي اختلفت بقوة عن التدريب.
ماذا يعني هذا للبعثات المستقبلية
للقارئ العام، الرسالة الرئيسية هي أن هذا العمل يمنح المركبات الكوكبية طريقة أكثر حذرًا وواعية ذاتيًا للقيادة على أرض خطرة. بدلًا من الثقة العمياء بتنبؤ واحد حول كيفية قبضة عجلاتها، يمكن للمركبات الآن وزن السلوك المتوقع وعدم اليقين معًا، واختيار طرق سريعة ومع ذلك من غير المرجح أن تتركها عالقة. من خلال التعلم المستمر من تجربة الانزلاق الخاصة بها، يمكنها التكيّف مع رمال ومنحدرات وإضاءات جديدة دون حاجة لإنقاذ بشري. ومع تخطيط وكالات الفضاء لبعثات سطحية أطول وأكثر طموحًا، قد يساعد هذا النوع من التنقل الواعي بعدم اليقين في ضمان أن تقضي هذه الروبوتات الثمينة وقتًا أطول في استكشاف أهداف علمية جديدة ووقتًا أقل في إخراج نفسها من متاعب.
الاستشهاد: Endo, M., Taniai, T. & Ishigami, G. Deep probabilistic traversability with test-time adaptation for uncertainty-aware planetary rover navigation. Sci Rep 16, 9499 (2026). https://doi.org/10.1038/s41598-026-40109-1
الكلمات المفتاحية: تنقل المركبات الكوكبية, عبور التضاريس, التخطيط الواعي بعدم اليقين, تعلم الآلة في الروبوتات, الاستكشاف المستقل