Clear Sky Science · ar
ACFM: خوارزمية الدمج الموزون التكيفية للقنوات لتحسين أداء كشف الأجسام الصغيرة في حركة المرور باستخدام الطائرات بدون طيار
رؤية أوسع من السماء
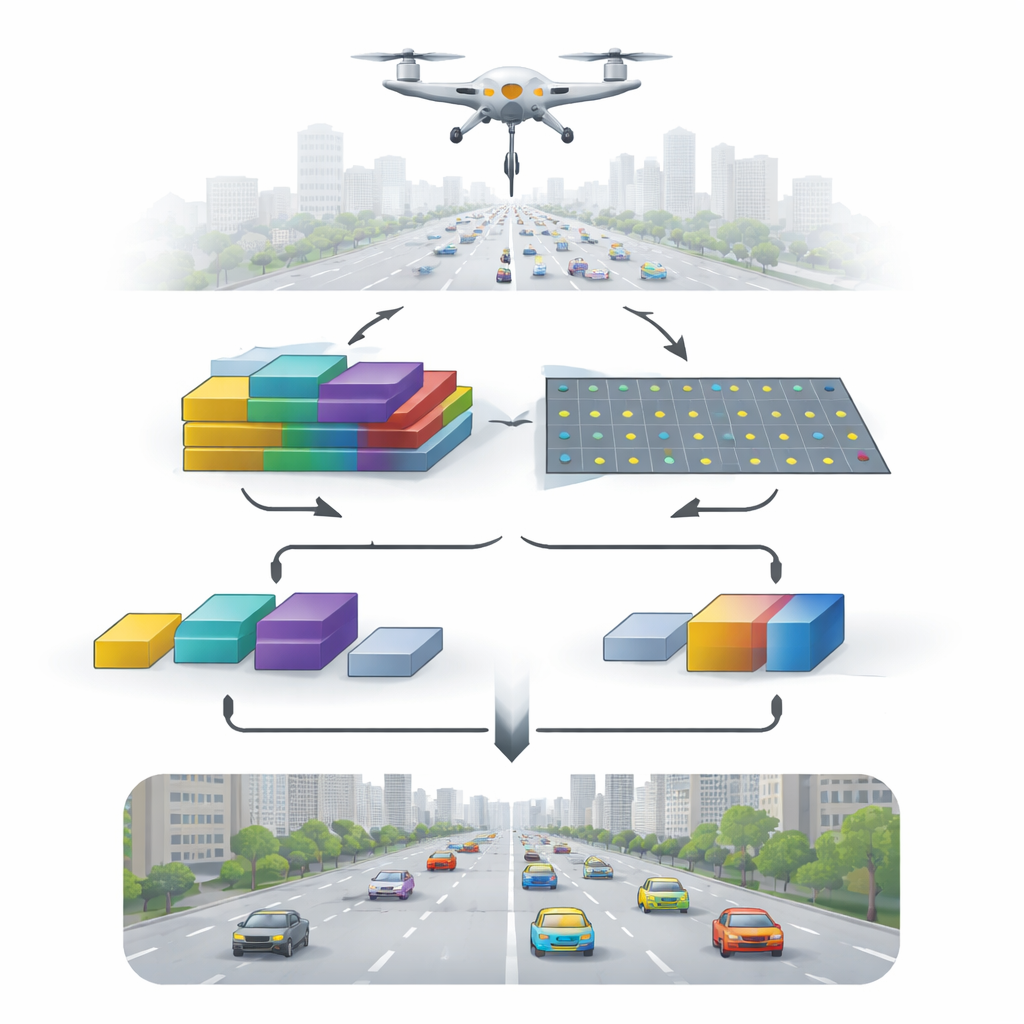
مع ازدياد استخدام الطائرات بدون طيار في مراقبة المرور وسلامة الحشود ومناطق الكوارث، تواجه مشكلة بسيطة لكنها عنيدة: من ارتفاعاتٍ كبيرة، الأشياء المهمة—مثل السيارات والحافلات وحتى الأشخاص—تشغل غالبًا بضع بيكسلات فقط. هذه البقع الصغيرة يسهل أن تفوتها الخوارزميات، خصوصًا في شوارع المدن المزدحمة المملوءة بالظلال واللافتات وتشويش الحركة. يقدم هذا البحث طريقة جديدة لمساعدة الحواسب على «رؤية» هذه الأجسام الصغيرة بوضوح أكبر في لقطات الطائرات بدون طيار، دون أن يبطئ الكشف بشكل ملحوظ.
لماذا تهم النقاط الصغيرة
تلتقط كاميرات الطائرات بدون طيار مشاهد واسعة من ارتفاعات عالية، لذا قد تحتوي صورة واحدة على طرق سريعة ومباني وأشجار وعشرات المركبات. معظم تلك المركبات تظهر صغيرة جدًا وقد تتداخل أو تختبئ خلف بعضها. أجهزة الكشف التقليدية المعتمدة على التعلم العميق ممتازة في العثور على الأجسام الكبيرة والواضحة، لكنها تميل إلى فقدان التفاصيل الدقيقة مع تقدم المعلومات عبر طبقات الشبكة الأعمق. النتيجة أن المركبات الصغيرة تندمج مع الخلفية، خصوصًا عند التقاط التقاطعات المزدحمة أو في ظروف الإضاءة المنخفضة أو لقطات مطموسة قليلًا. طرق الدمج متعددة القياسات الحالية تساعد إلى حد ما عبر الجمع بين معلومات طبقات مختلفة من الشبكة، لكنها عادة ما تعتمد على قواعد ثابتة مُعدة مسبقًا وتكافح للتكيف عندما يصبح المشهد مزدحمًا أو معقدًا بشكل خاص.
طريقة أذكى لدمج الأدلة
يقترح المؤلفون وحدة دمج موزونة قناتيًا وتكيفية، أو ACFM، مصممة للترابط مع كاشفات الأجسام الحالية لجعلها أفضل في اكتشاف الأهداف الصغيرة في مشاهد حركة المرور الملتقطة بالطائرات بدون طيار. بدلاً من معاملة كل المعلومات البصرية على قدم المساواة، تعمل ACFM بفرعين متخصصين بالتوازي ثم تدمج مخرجاتهما بطريقة تعتمد على المشهد. فرع واحد يصقل كيفية معالجة الميزات عبر القياسات بحيث لا تُفقد التفاصيل المكانية الدقيقة. والفرع الآخر يعمل كمصباح كاشف، يعزز إشارات الأجسام الصغيرة المهمة حقًا بينما يخمد أنماط الخلفية المشتتة. والأهم أن الدمج بين هذين الفرعين ليس ثابتًا: ACFM تعدل مقدار الثقة في كل فرع وفقًا للصورة الحالية، مما يسمح للنظام بالاستجابة بشكل مختلف لطريق هادئ مقارنةً بتقاطع مزدحم.
الحفاظ على التفاصيل عبر القياسات
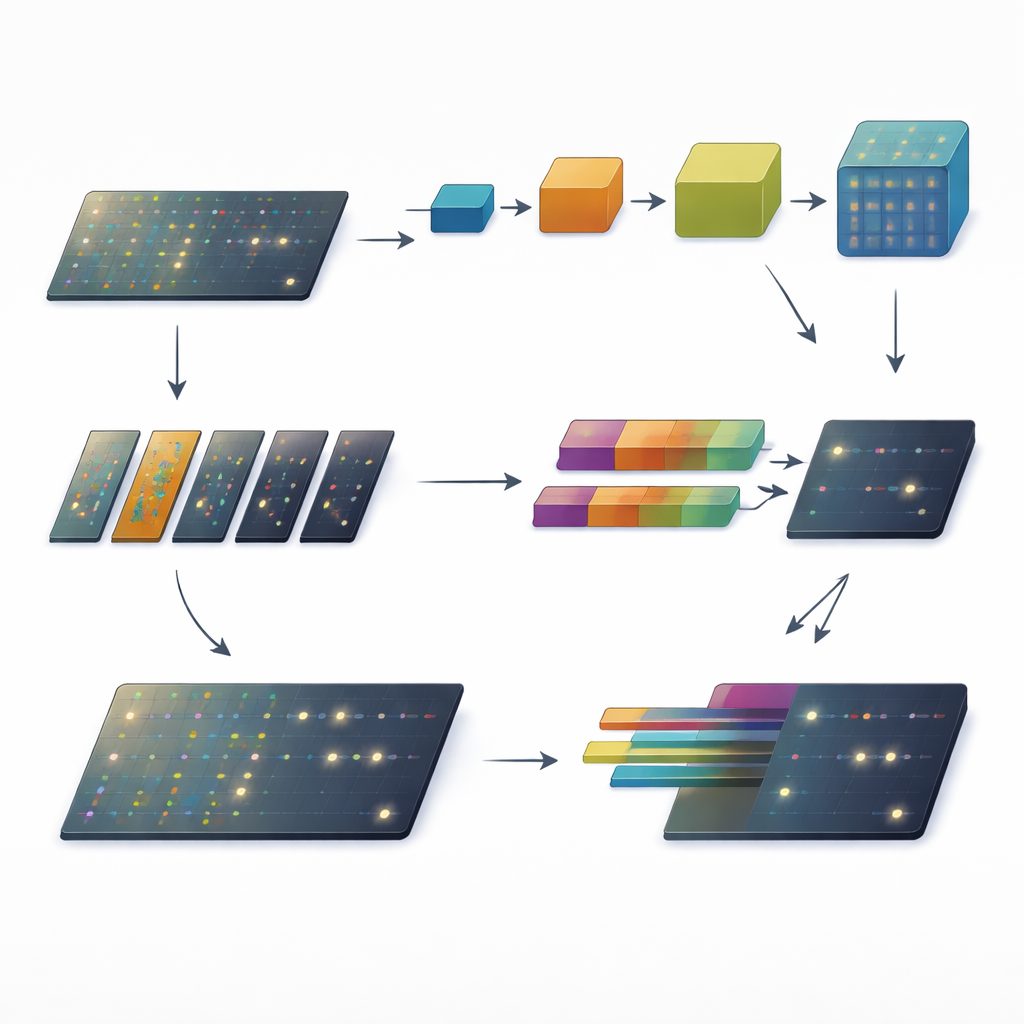
في الفرع الأول، المسمى كتلة تحسين متعددة القياسات، تمرر الشبكة الميزات عبر مسارين. أحد المسارين يحافظ ببساطة على المعلومات الأصلية، ما يضمن بقاء التفاصيل الدقيقة عالية الدقة. المسار الآخر يضغط ثم يوسع تمثيل الصورة، مما يشجع النموذج على فهم السياق الأوسع لمواقع المركبات الصغيرة داخل المشهد. في النهاية، تندمج هذان المساران بحيث يستفيد كل بكسل ناتج من كل من التفاصيل المحلية الحادة وفهم المنطقة المحيطة. هذا يجعل من الأسهل على الكاشف رسم صناديق تحيط بالمركبات الصغيرة—سواء سيارات أو حافلات—بشكل أدق وأكثر اتساقًا، حتى عندما تكون الخلفية مزدحمة أو محجوبة جزئيًا.
خفض ضجيج الخلفية
يركز الفرع الثاني على الانتباه. يقسم قنوات الميزات إلى مجموعات ويعلّم، لكل مجموعة، «قناعًا» متقطعًا يبرز المناطق الأكثر وعدًا فقط. تُخفض المناطق التي تشبه الخلفية—أسطح الطرق، وأسقف المباني، وأغطية الأشجار—بينما تُضخم الإشارات الصغيرة ذات الدلالة، مثل الانعكاسات والحواف الخاصة بالمركبات. من خلال دمج هذه التفاصيل المشحوذة مرة أخرى مع الميزات الأصلية بطريقة متحكم بها، ينتج هذا الفرع القائم على الانتباه المتقطع المجمّع رؤية أنظف وأكثر تمييزًا للمشهد. هذا يقلل من احتمال أن يخلط الكاشف بين أنماط الأسفلت أو الظلال الناتجة عن المباني وبين مركبات حقيقية.
ترك المشهد يختار المزج
الجزء النهائي في ACFM هو آلية وزن تكيفية على مستوى القناة تقرر، قناةً قناةً، مدى الاعتماد على كل فرع. تلخص أولًا ما يحدث في الصورة بأكملها، ثم تستخدم عملية خفيفة الوزن للاستنتاج مجموعة من الأوزان بين صفر وواحد. إذا كان المشهد بسيطًا والأجسام متباعدة جيدًا، قد يميل النظام أكثر نحو تحسين متعددة القياسات. وإذا كان المشهد مكتظًا أو فوضويًا أو ضوضائيًا، يمكنه تحويل التركيز أكثر إلى فرع الانتباه الذي يخمد مشتتات الخلفية. هذا التوازن الديناميكي يحل محل قواعد الدمج الصارمة والمصممة يدويًا باستراتيجية تلقائية تعتمد على البيانات، مما يمكّن الكاشف من الاستجابة بمرونة مع تغير الظروف من إطار لآخر.
عيون أدق لحركة الطائرات بدون طيار
عند توصيله بكاشف شائع يُسمى GFL واختباره على ثلاث مجموعات بيانات عامة لحركة الطائرات بدون طيار، حسّنت ACFM باستمرار درجات الكشف، خصوصًا في المجموعات التحدّية التي تضم العديد من المركبات الصغيرة والمتداخلة. جاءت مكاسب الدقة مع تكلفة حسابية إضافية ضئيلة، مما يعني أن النظام المحسن يمكنه الاستمرار في العمل قرب الوقت الحقيقي—وهو مطلب حاسم للمراقبة العملية لحركة المرور. للقراء غير المتخصصين، الخلاصة واضحة: عبر الحفاظ على التفاصيل، وخفض الضجيج، والتكيف في طريقة دمج الميزات بناءً على المشهد، تساعد ACFM الطائرات بدون طيار على العمل أكثر كشهود بشريين منتبهين وأقل كمطابقين نمطيين جامدين، ما يوفر أساسًا أكثر موثوقية لتطبيقات المدن الذكية والمراقبة الجوية المستقبلية.
الاستشهاد: Liu, S., Zhu, H., Yuan, Z. et al. ACFM: adaptive channel weighted fusion algorithm for improving small object detection performance in UAV traffic. Sci Rep 16, 8366 (2026). https://doi.org/10.1038/s41598-026-39789-6
الكلمات المفتاحية: مراقبة حركة المرور بالطائرات بدون طيار, كشف الأجسام الصغيرة, رؤية حاسوبية, آليات الانتباه, اندماج الميزات متعددة القياسات