Clear Sky Science · ar
RFGLNet لتجزئة دلالية معممة عبر المجالات في ظروف الطقس السيئ مع تعزيز منخفض الرتبة في التردد
رؤية الطريق عندما يسوء الطقس
تعد السيارات الذاتية والروبوتات المخصصة للتوصيل بشوارع أكثر أمانًا وكفاءة—لكن ذلك مشروط بقدرتها على «رؤية» العالم المحيط بها بشكل موثوق. المطر والضباب والثلج والليالي المظلمة تجعل هذه الرؤية صعبة للغاية، فهي تزيل التباين، تضيف بقعًا من الضوضاء، وتطمس حواف المشاة والمركبات وأرصفة الطريق. يقدم هذا البحث RFGLNet، نظام رؤية حاسوبية جديد مصمم للحفاظ على وعي الآلات بالطريق حادًا حتى عندما تكون أحوال الطقس في أسوأ حالاتها.

لماذا يعمي الطقس السيئ الآلات
تعتمد أنظمة القيادة الذاتية الحالية غالبًا على عملية تسمى التجزئة الدلالية، حيث يخصّص الخوارزم صفًا—مثل طريق، سيارة، مُشاة، أو مبنى—لكل بكسل في الصورة. تحت ضوء النهار الصافي، تنفذ الشبكات العصبية الحديثة ذلك بدقة ملحوظة. لكن تحت المطر الغزير أو الضباب الكثيف تفقد الصور سطوعها، وتكتسب ضوضاء، وتتلاشى الحدود بين الأجسام. جمع وووسم مجموعات بيانات ضخمة لكل حالة طقس سيئة ممكنة مكلف بشكل مفرط، لذا تُدرَّب معظم الأنظمة بشكل أساسي على صور نهارية عادية ومشمسة. عند مواجهة عواصف أو ثلوج لم تُرَ أثناء التدريب، تتراجع الأداء فجأة. الحلول السابقة حاولت إما تنظيف الصور أولاً ثم تجزئتها، أو تكييف النماذج لظروف معينة. كلا النهجين يميل لأن يكون هشًا أو بطيئًا أو معتمدًا أكثر من اللازم على بيانات موسومة لحالات الطقس السيئ.
شبكة جديدة مصممة للظروف القاسية
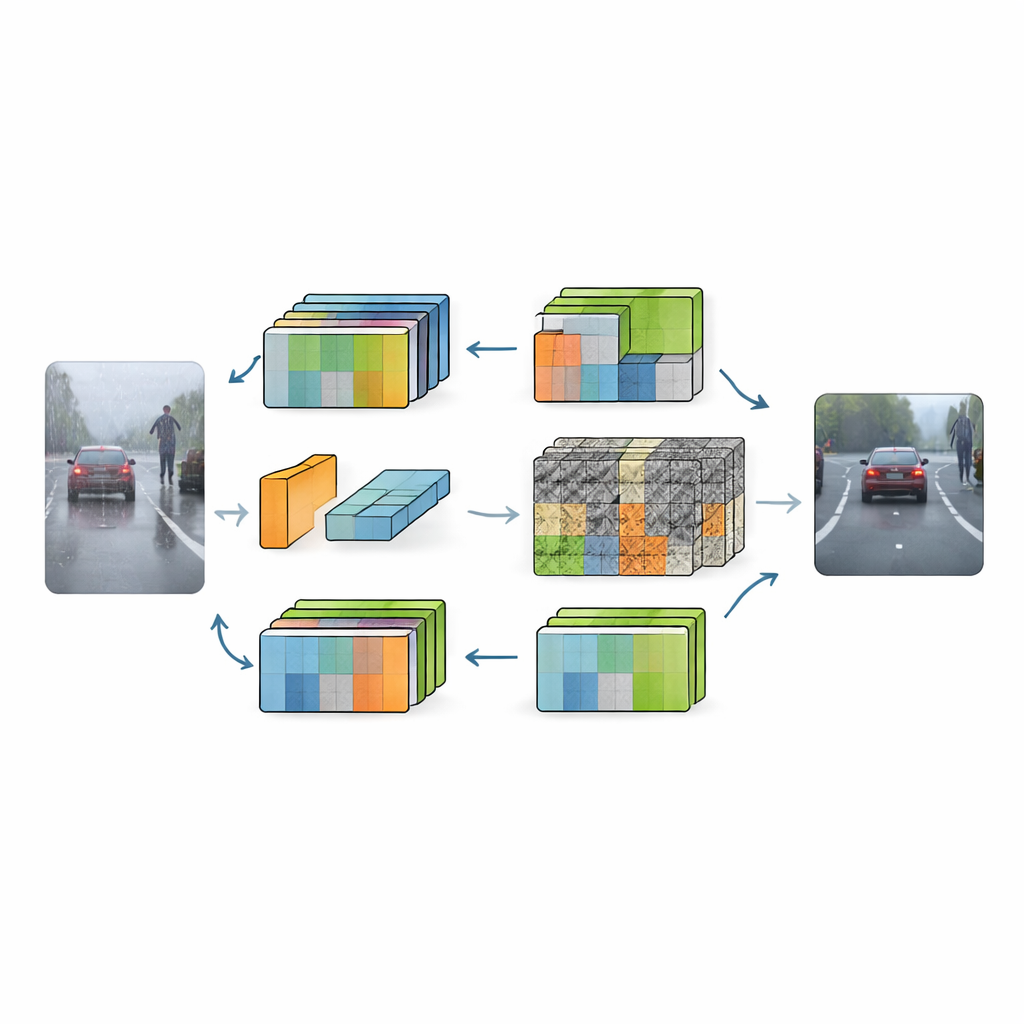
يتناول RFGLNet هذه المشكلة باستراتيجية مختلفة: يتعلم فقط من مشاهد المدن النهارية القياسية، ومع ذلك يعمم إلى مجموعة واسعة من الظروف القاسية. يبدأ المؤلفون من DINOv2، نموذج بصري كبير مُدرَّب مسبقًا ومعروف باكتسابه هيكلًا غنيًا للمشاهد. بدلًا من إعادة تدريب هذا العمود الفقري الثقيل من الصفر، يجمدون معاييره ويضيفون عليه مجموعة من الوحدات الخفيفة. تعمل هذه الوحدات كمهايئات ذكية، تعيد تشكيل التمثيلات الداخلية للعمود الفقري بحيث تقل حيرتها بفعل التشويش البصري من رقائق الثلج أو قطرات المطر أو الظلام. النتيجة نظام يستخدم 4.32 مليون معلمة قابلة للتدريب فقط—قليل مقارنة بنماذج الرؤية المعتادة—مع قدرة على تعلم التعامل مع طقس لم يرَه خلال التدريب.
كيف يتعلم الشبكة تصفية الطقس
الابتكار الأول في RFGLNet هو وحدة منخفضة الرتبة تُركّب في كل طبقة من العمود الفقري المجمد. قبل التدريب، تشغل هذه الوحدة إجراءً رياضيًا يعرف بتحليل القيم الفردية (SVD) على مصفوفة ميزات مُحاكية. يمنحها ذلك مجموعة مكوِّنات مدمجة تتوافق تقريبًا مع هيكل ميزات DINOv2 الداخلية من البداية، بدلًا من البدء بضوضاء عشوائية. أثناء التدريب تُضبط هذه المكوِّنات، مما يسمح للوحدة بتصحيح ميزات العمود الفقري بلطف لمهمة جديدة دون إزعاج معرفته الأساسية. ثم يطبق النظام كتلة انتباه قائمة على فورييه تُحوِّل الميزات إلى نطاق التردد. هناك، تمثل البنى العريضة ذات التغير البطيء عادةً الأجسام ذات المعنى، بينما ترتبط الأنماط الحادة والمتقلبة غالبًا بضوضاء الطقس. عبر كبح التشويش عالي التردد وتضخيم المكوّنات الأملس، يقوّي النظام الفهم العام للمشهد ويخفّف من التداخل.
توضيح التفاصيل دون التشتت
حتى مع ميزات عالمية أنظف، تظل التفاصيل الصغيرة مثل علامات الحارات والقضبان السياجية ومحيط مُشاة بعيد عرضة للطمس في الطقس السيئ. لمواجهة ذلك، يقدم المؤلفون وحدة انتباه مكاني مجمعة في جزء فك الترميز من الشبكة. بدلًا من معالجة كل قنوات الميزات معًا، تقسم الوحدة القنوات إلى مجموعات وتتعلم خرائط أوزان مكانية منفصلة لكل مجموعة. يمكن التأكيد على القنوات التي تحمل بنية مهمة، مثل الحواف، بينما تُخفف القنوات التي تسيطر عليها الضوضاء. تُدمج هذه الخرائط الخاصة بكل مجموعة في وزن مكاني عام يعزز التفاصيل الدقيقة ويشدّد حدود الأجسام عبر دقات متعددة. عمليًا، يتعلم RFGLNet أين ينظر عن قرب وأين يتجاهل بقع الضباب أو المطر المشتتة.
عائد عملي في مشاهد طريق صعبة
لاختبار منهجهم، درّب الباحثون RFGLNet على مجموعة Cityscapes المعروفة لمشاهد المدن النهارية الصافية، ثم قيّموه على مجموعة ACDC التي تركز على القيادة في المطر والثلج والضباب والظلام الليلي. دون أن يرى وسوم ACDC خلال التدريب، حقق RFGLNet متوسط تقاطع على الوحدة (mIoU) بنسبة 78.3 بالمئة—متفوقًا على عدة طرق رائدة لتعميم المجال والتكييف، والكثير منها أكبر وأكثر احتياجًا للحوسبة. برز بشكل خاص في تجزئة الفئات الصعبة مثل الجدران والأسوار، التي تُفقد حوافها بسهولة في الطقس السيئ. في الوقت نفسه، عمل النموذج بكفاءة على وحدة معالجة رسومات للمستهلك، معالجًا عشرات الصور في الثانية، وهو متطلب أساسي لأنظمة القيادة في الزمن الحقيقي.
رؤية أوضح من أجل استقلالية أكثر أمانًا
لغير المتخصصين، الخلاصة أن RFGLNet يبيّن كيف يمكن ترقية أعمدة الرؤية الحالية لأجل استقلالية أكثر أمانًا دون إعادة تدريب لا نهائية على كل عاصفة ممكنة. عبر الجمع بين ضبط منخفض الرتبة المدمج، وتصفية الضوضاء المعتمدة على التردد، والاهتمام المكاني المجمّع، يتعلم النظام الحفاظ على بنية المشهد الأساسية بينما يزيل فوضى الطقس. ومع نضج هذه الأساليب وتدريبها على مجموعات أوسع من ظروف العالم الحقيقي، يمكن أن تساعد السيارات والروبوتات الذاتية على الحفاظ على وعي موثوق بالموقف عندما يظلم السماء ويصبح الطريق أمامهم بعيدًا عن الوضوح.
الاستشهاد: Ye, X., Shi, X. & Li, Y. RFGLNet for adverse weather domain-generalized semantic segmentation with frequency low-rank enhancement. Sci Rep 16, 8253 (2026). https://doi.org/10.1038/s41598-026-39052-y
الكلمات المفتاحية: القيادة الذاتية, إدراك ظروف الطقس السيئة, التجزئة الدلالية, متانة رؤية الحاسوب, تعميم المجال