Clear Sky Science · ar
بحث في طريقة التعرف الذكي على قطع الميكانيكا ذات التشابه العالي في بيئة صناعية
لماذا اكتشاف القطع المتشابهة مهم
تعتمد المصانع الحديثة على الروبوتات للعثور على آلاف القطع المعدنية الصغيرة والتقاطها وتجميعها. كثير من هذه القطع — مثل التروس والمحامل والسنود والصواميل والبراغي — تبدو متشابهة بشكل يربك، خصوصاً تحت إضاءة قاسية أو عندما تتداخل فوق أحزمة ناقلة. إذا أخطأ الروبوت في التمييز بينها، فقد يؤدي ذلك إلى انسدادات، عيوب، أو حتى تلف في الآلات. تبحث هذه الدراسة في سؤال يبدو بسيطاً لكنه يحمل عواقب صناعية كبيرة: كيف يمكن لنظام رؤية صغير وسريع أن يفرّق بثقة بين قطع متشابهة جداً في ظروف ورشة عمل حقيقية؟
التحديات في رؤية المصنع الحقيقية
في أرضية المصنع، نادراً ما تحظى الكاميرات بالمشاهد النظيفة المستخدمة في فيديوهات العرض. الإضاءة غير متساوية، ما يسبب انعكاسات قوية على المعادن اللامعة وظلالاً عميقة على مناطق أخرى. تُصب القطع في صناديق أو تُبعثر على الأحزمة، وغالباً ما تحجب بعضها أجزاء من بعضها الآخر. وزاد الطين بلة أن العديد من المكونات المعدنية تشترك في أشكال وألوان وقوامات متقاربة، مما يترك دلائل بصرية قليلة واضحة. البرمجيات التقليدية التي تطابق قوالب أو تستخدم ميزات مصمّمة يدوياً تكافح بشدة في هذه الظروف: فهي بطيئة، هشّة أمام تغير الإضاءة، وغالباً ما تفشل عند تداخل القطع أو تدويرها بطرق غير متوقعة.
الاستناد إلى كاشفات سريعة بنقرة واحدة
في السنوات الأخيرة، أصبحت عائلة نماذج الذكاء الاصطناعي المسماة YOLO (أي "You Only Look Once") شائعة لاكتشاف الأجسام في الصور بمررَة واحدة وسريعة. توازن YOLOv8، إحدى النسخ الأحدث، بين الدقة والسرعة جيداً ويمكنها العمل في الزمن الحقيقي. مع ذلك، عندما تبدو القطع مختلفة بشكل طفيف فقط، قد يفوّت YOLOv8 دلائل رفيعة أو يرسم صناديق غير دقيقة. المحاولات السابقة لتقليص نماذج YOLO للأجهزة الصغيرة كانت تميل إلى تقليل المعاملات لكن أيضاً إضعاف قدرتها على تمثيل التفاصيل الدقيقة، وهو بالضبط ما يلزم لتميز قطع الميكانيكا المتشابهة.
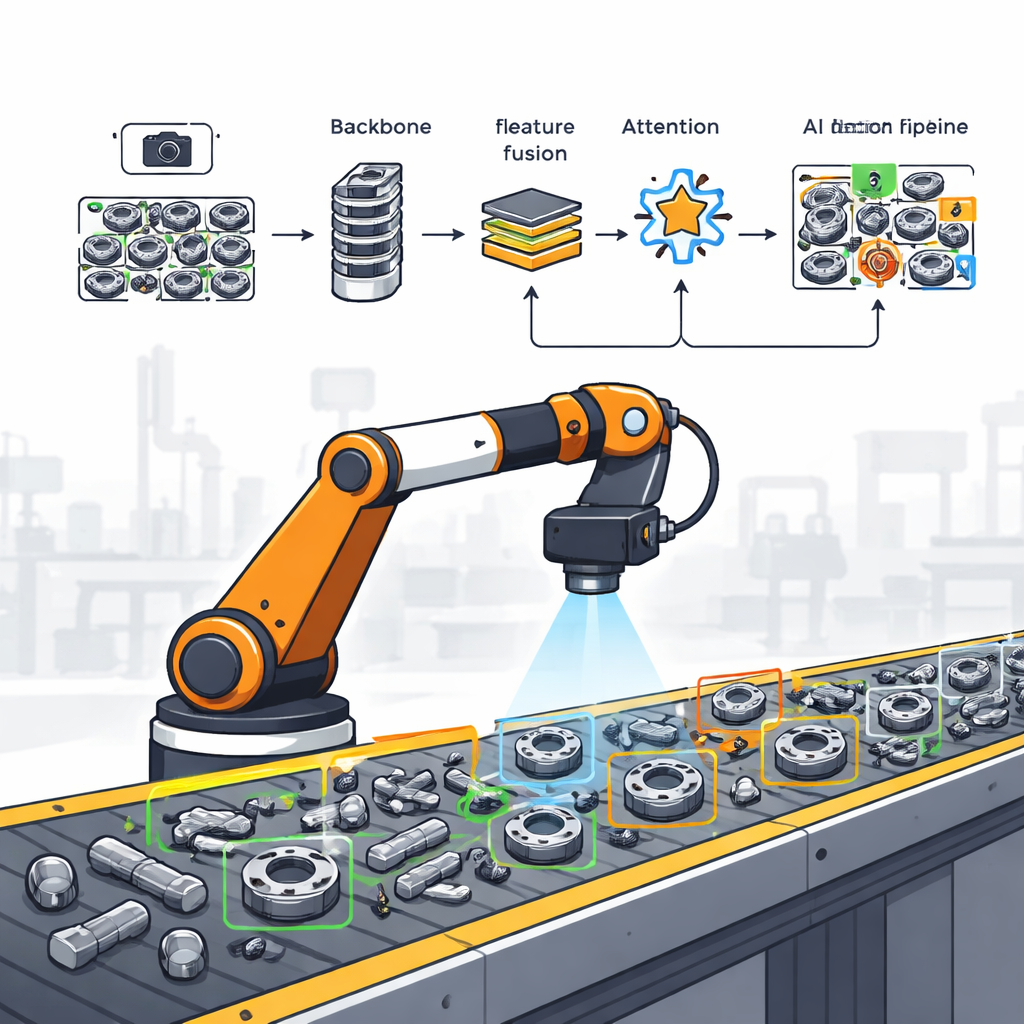
شبكة اكتشاف أنحف لكنها أكثر حدة
يقترح المؤلفون نسخة مطورة من أصغر نموذج YOLOv8، المسمى YOLOv8n، مصمَّمة خصيصاً للقطع الصناعية المربكة وللأجهزة ذات القدرة الحاسوبية المحدودة. أولاً، يستبدلون جوهر الشبكة القياسي بتصميم أحدث اسمه FasterNet، الذي يستخدم حيلة "التفاف جزئي" للعمل فقط على أكثر مناطق الصورة فائدة في كل خطوة. هذا يقلل العمل المكرر في الذاكرة دون فقدان المعلومات البصرية الأساسية. ثانياً، يعيدون تصميم الجزء الوسيط "الرقبة" في الشبكة لاستخدام هرم ميزات ذو اتجاهين (BiFPN)، ما يسمح لتدفق المعلومات أن يسير من الرؤى الشاملة والخشنة إلى التفاصيل الدقيقة وبالعكس، بحيث تستفيد الأجزاء الصغيرة والمغطاة من السياق والعكس صحيح.
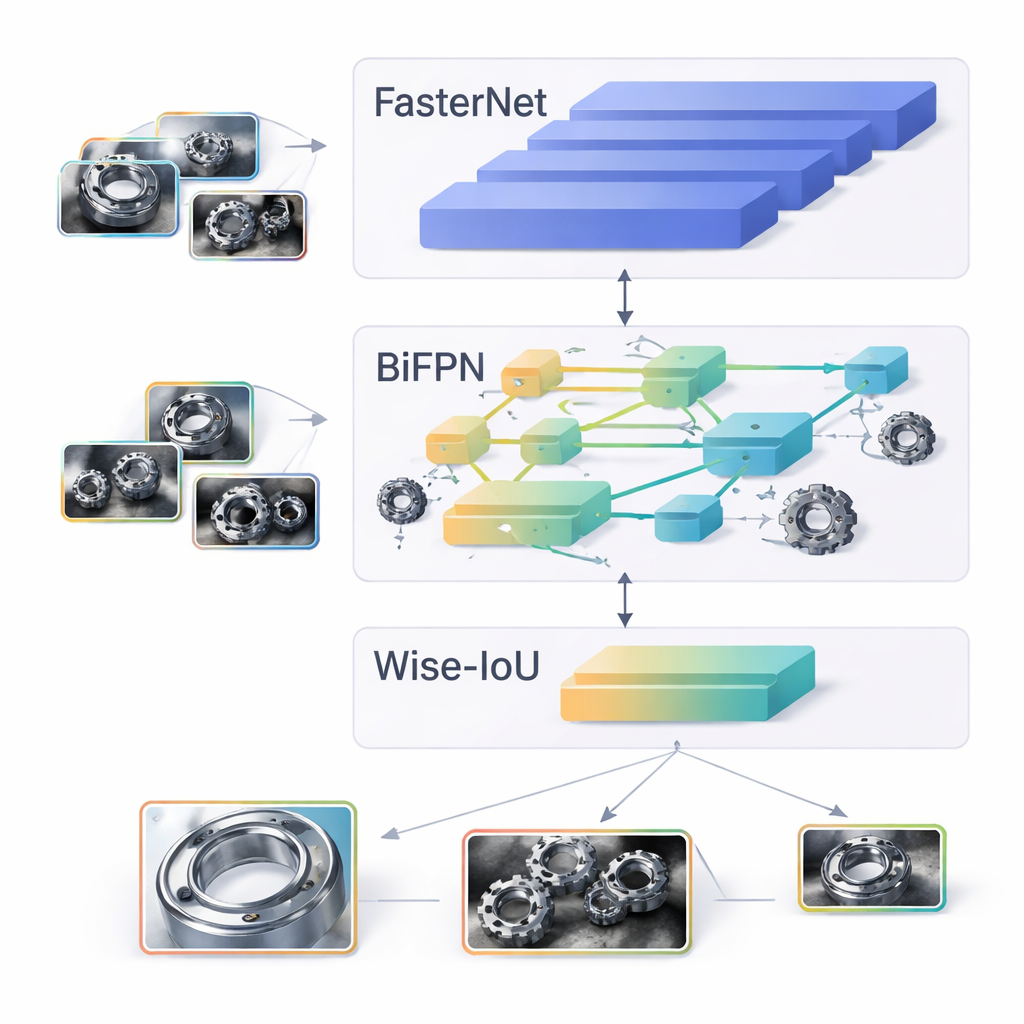
تعليم الشبكة تجاهل الإشارات السيئة
بخلاف بنية الشبكة، يؤثر أسلوب تعلمها وضبط معاييرها الداخلية — الموجه بدالة خسارة — بشكل كبير في ما توليه من اهتمام. طرق التدريب التقليدية تعامل جميع الأمثلة إلى حد ما على قدم المساواة، ما يعني أن صناديق التدريب ذات الجودة المنخفضة (غير المحاذية جيداً أو الغامضة) يمكن أن تضلل النموذج. يستبدل المؤلفون قاعدة مطابقة الصناديق الاعتيادية بطريقة تسمى Wise‑IoU. ببساطة، تمنح هذه المقاربة كل مثال تدريبي درجة لا تُقاس بالتماس وحده، بل بمدى كونه "قيمة شاذة"، ثم تقلل بهدوء تأثير تلك الأمثلة غير الموثوقة. مع مرور الوقت، يتعلم النظام أساساً من القطع الواضحة والموسومة جيداً، ما يؤدي إلى صناديق اكتشاف أكثر إحكاماً وموثوقية، خصوصاً عندما تتداخل القطع أو تظهر تحت إضاءة صعبة.
وضع النظام تحت الاختبار
لتقييم التصميم، بنى الفريق مجموعة صور خاصة بست قطع ميكانيكية شائعة، تم التقاط كل منها 1250 مرة تحت مستويات إضاءة مختلفة ومع درجات متفاوتة من التداخل المتبادل. قارنوا النموذج المحسّن مع YOLOv8n القياسي وعدة كاشفات خفيفة الوزن أخرى. حقق النظام الجديد جودة كشف إجمالية أعلى بينما استهلك أقل من ثلثي الحسابات وقلل عدد المعاملات بحوالي 42%. على وجه الخصوص، رفع مؤشراً رئيسياً يُدعى المتوسط المرجحي للدقة عند عتبة مستخدمة شائعاً بمقدار 1.5 نقطة مئوية، مع الاستمرار في التشغيل بكفاءة كافية للاستخدام في الزمن الحقيقي على أجهزة متواضعة.
ما يعنيه هذا للمصانع الذكية
بعبارات يومية، تُظهر الدراسة أن روبوتات المصانع يمكن أن تصبح أذكى وأكثر اقتصادية في الموارد. مع جوهر الشبكة المعاد تصميمه، ودمج ميزات أكثر ذكاءً، وقاعدة تعلم أكثر انتقائية، يمكن لنموذج ذكاء اصطناعي صغير أن يميز بثقة بين التروس والمحامل وغيرها من القطع المتشابهة في مشاهد فوضوية وحقيقية، حتى عندما تكون الإضاءة ضعيفة والقطع متداخلة. يجمع هذا بين دقة أعلى وحِمل حسابي أقل، ما يسهل نشر رؤية موثوقة على أجهزة الحافة منخفضة التكلفة ويمهد الطريق لخطوط إنتاج أكثر مرونة وتلقائية دون الحاجة إلى خوادم ضخمة أو بيئات مُتحكم بها تماماً.
الاستشهاد: Lu, C., Ye, X., Wu, J. et al. Research on intelligent recognition method of mechanical parts with high feature similarity in industrial field environment. Sci Rep 16, 7640 (2026). https://doi.org/10.1038/s41598-026-39036-y
الكلمات المفتاحية: كشف الأجسام الصناعية, قطع ميكانيكية, التعلم العميق خفيف الوزن, YOLOv8, أتمتة المصانع