Clear Sky Science · ar
استراتيجية تحكم شبيهة بالبشر تعتمد على التعلم المعزز العميق لراحة محسّنة في روبوتات إعادة تأهيل الأطراف السفلية
روبوتات تساعد الناس على المشي من جديد
عندما يعاني شخص من صعوبة في المشي بعد سكتة دماغية أو إصابة في النخاع الشوكي، قد تكون جلسات العلاج بطيئة ومرهقة وغير مريحة. صُممت روبوتات إعادة تأهيل الأطراف السفلية لدعم وتوجيه سيقان المريض أثناء التدريب، لكن الآلات الحالية غالبًا ما تبدو جامدة و«آلية». تستكشف هذه الدراسة كيف أن تزويد هذه الروبوتات بـ«دماغ» أكثر تشبهًا بالبشر — باستخدام خوارزميات تعلم متقدمة — يمكن أن يجعل التدريب ألطف وأكثر طبيعية، وفي النهاية أكثر فاعلية للمرضى.
لماذا يجب أن يبدو تمرين المشي طبيعياً
مع شيخوخة السكان، يعيش عدد أكبر من الناس مع مشاكل مشي خطيرة ويتجه العديد منهم إلى إعادة التأهيل المدعوم بالروبوت. تتبع الروبوتات التقليدية مسارات ساق مبرمجة مسبقًا وتستخدم قواعد تحكم بسيطة لتحريك المفاصل. وعلى الرغم من موثوقيتها، تكافح هذه الأساليب مع واقع الحركة البشرية الفوضوي: نمط مشي كل شخص يختلف قليلاً، وقد يدفع أو يسحب روبوت جامد بطرق تبدو محرجة أو حتى مؤلمة. يجادل المؤلفون بأن نجاح إعادة التأهيل يتطلب أن يحافظ الروبوت ليس فقط على انتصاب المريض وتحريكه، بل أن يتكيف مع أنماط المشي الطبيعية ويقلل القوى التي يمارسها على الجسم.
التعلم من خطوات بشرية حقيقية
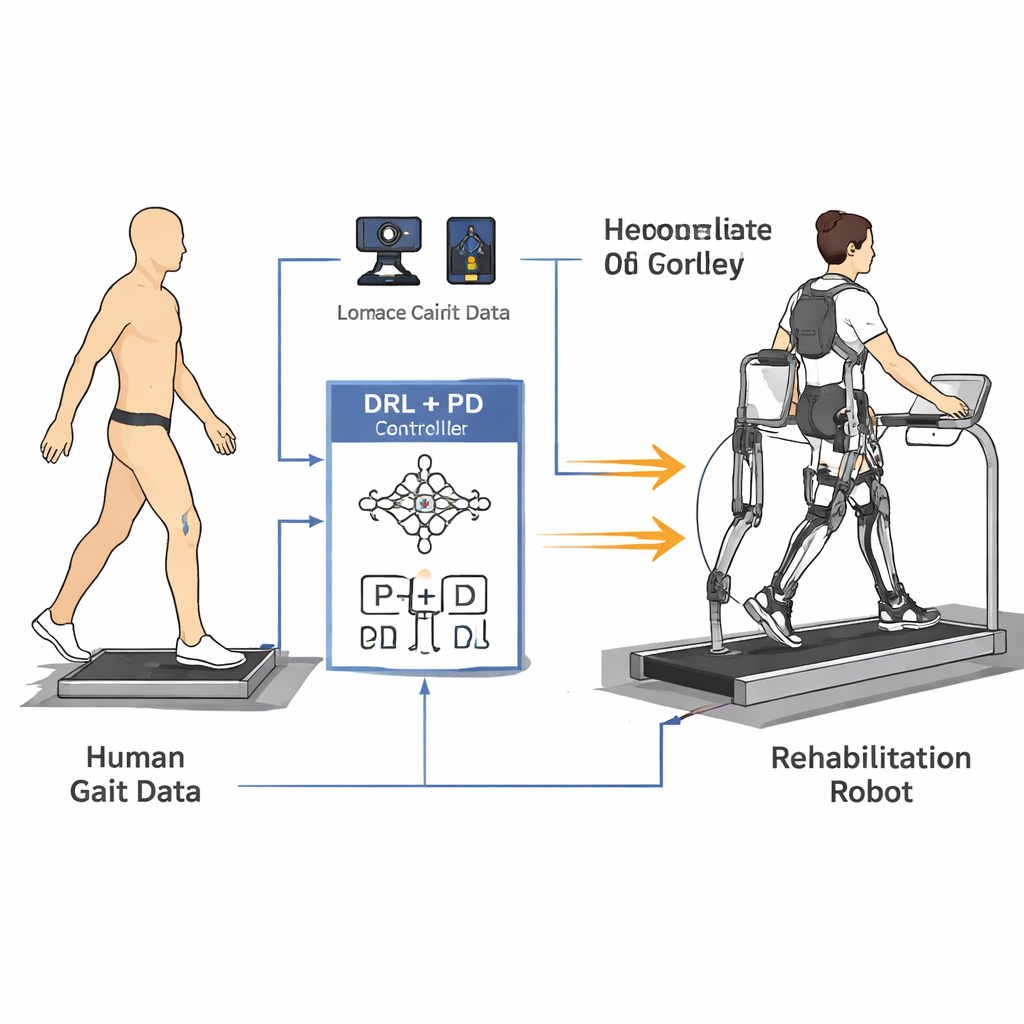
لتعليم الروبوت كيف يمشي الناس فعلاً، بنى الباحثون أولاً نموذجًا رياضيًا مبسطًا للساقين والجذع. ثم سجلوا بيانات المشي من خمسة متطوعين أصحاء باستخدام نظام التقاط حركة ثلاثي الأبعاد عالي الدقة ولوحات قياس القوة في الأرض. سمحت العلامات العاكسة على الوركين والركبتين والكاحلين والجذع بحساب كيف تحرك كل مفصل خلال خطوة كاملة، بينما قاست الحساسات تحت القدمين مدى الضغط الذي تمارسه كل ساق على الأرض. من هذه القياسات أنشأوا منحنيات مرجعية ناعمة لزوايا الورك والركبة وتتبعوا كيف تغيرت قوى المفاصل مع مرور الزمن، مسجلين شكل وإيقاع المشي الطبيعي.
متحكم أذكى مع الحفاظ على الأمان
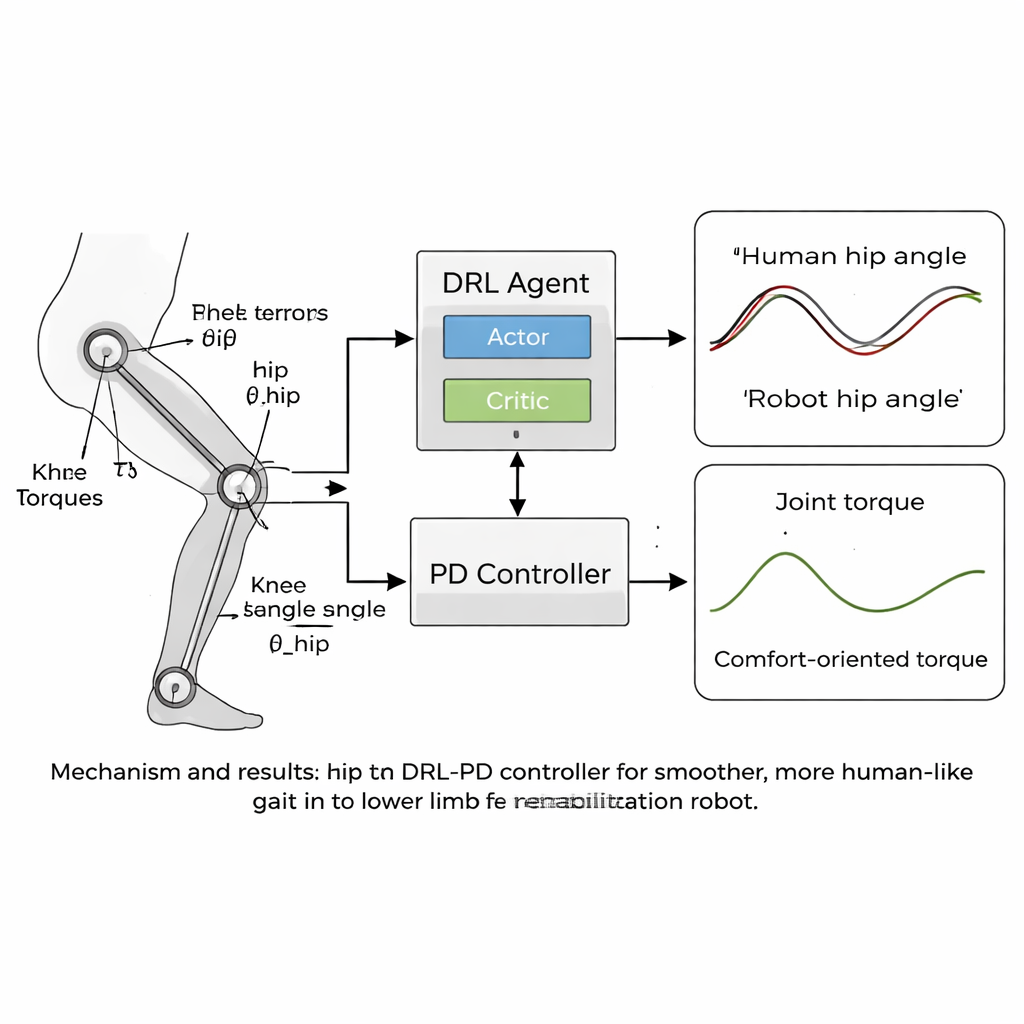
جوهر الورقة هو استراتيجية تحكم «شبيهة بالبشر» جديدة تجمع بين التعلم المعزز العميق (DRL) ومتحكم تناسبي-تفاضلي (PD) كلاسيكي. التعلم المعزز العميق هو نوع من الذكاء الاصطناعي يجرّب فيه وكيل افتراضي إجراءات، يراقب النتائج، ويكتشف تدريجياً ما ينجح عبر تعظيم إشارة مكافأة. في هذه الحالة، يجلس الوكيل فوق متحكم PD: يرى زوايا وسرعات مفاصل الروبوت ويقرر العزوم التي يطبقها، بينما تضمن طبقة الـPD ألا تنزلق المفاصل بعيدًا عن زوايا هدف آمنة ومشابهة للبشر. دُرِّست دالة المكافأة بعناية لتشجيع المشي الأمامي المستقر مع معاقبة أي شيء قد يشعر المريض بالانزعاج — مثل الحركة المتقطعة، القوى الكبيرة عند المفاصل، أو أوضاع غير آمنة كالاتكاء المفرط أو انخفاض ارتفاع القدم عن الأرض.
حركة أكثر سلاسة، أقرب إلى مشية بشرية
اختبر الفريق النهج في محاكيات حاسوبية باستخدام نموذج روبوت إعادة تأهيل للأطراف السفلية بمفاصل ورك وركبة تطابقت مع بيانات المشي لديهم. خلال آلاف حلقات التدريب، تعلَّم متحكم DRL-PD إنتاج دورة مشي متكررة حيث تبعت زوايا المفاصل أنماط الإشارة المرجعية البشرية عن قرب. تحركت وركا وركب الروبوت في حلقات منتظمة ومستقرة، وهو مؤشر على مشية موثوقة وقابلة للتكرار. والأهم أن العزوم اللازمة لتحريك المفاصل أصبحت أكثر نعومة وأصغر مقارنةً بمتحكم PD التقليدي. أظهرت المقاييس الكمية أن أخطاء التتبع انخفضت إلى بضعة أجزاء من المئوية من الراديان، ومعدل تغير عزوم المفاصل — وهو مقياس لمدى «تقطع» القوى التي يشعر بها المريض — انخفض بأكثر من النصف. كما ظل المتحكم مستقرًا حتى عند تغيير كتل الساق في النموذج بنسبة عدة بالمئة، مما يوحي بقدرته على تحمل اختلافات العالم الحقيقي بين المستخدمين.
ما معنى ذلك لروبوتات إعادة التأهيل المستقبلية
بالنسبة لغير المتخصصين، الرسالة الأساسية بسيطة: من خلال السماح للروبوت بتعلّم إيقاعات وحدود المشي البشري من بيانات حقيقية، ومكافأته على أن يكون ناعمًا ولطيفًا، يمكننا تصميم آلات تساعد الناس على ممارسة المشي بطريقة تبدو أكثر طبيعية وأقل إجهادًا. قد يكون المرضى أكثر استعدادًا للمشاركة في جلسات أطول وأكثر تكرارًا إذا تحرك الروبوت معهم بدلًا من ضده. وعلى الرغم من أن النتائج الحالية مأخوذة من محاكاة وتتطلب حواسب قوية أثناء التدريب، فعندما يكتمل التعلم يمكن تشغيل المتحكم بكفاءة على أجهزة حقيقية. يرى المؤلفون أن هذا العمل خطوة نحو روبوتات إعادة تأهيل مخصصة وتكيفية تضبط نفسها على مشية واحتياجات راحة كل مريض، مما قد يحسن التعافي ونوعية الحياة.
الاستشهاد: Jin, Y., Zhang, J., Li, W. et al. A humanoid control strategy based on deep reinforcement learning for enhanced comfort in lower limb rehabilitation robots. Sci Rep 16, 7370 (2026). https://doi.org/10.1038/s41598-026-39011-7
الكلمات المفتاحية: روبوتات إعادة التأهيل, تدريب المشي, التعلم المعزز العميق, الهيكل الخارجي (إكzosكِلتون), راحة المريض