Clear Sky Science · ar
سرعة حركة طرف صناعي مستقل تشكّل التجسّد وسهولة الاستخدام والصفات الاجتماعية للروبوت في الواقع الافتراضي
لماذا تهم طريقة تحرك الذراع الروبوتية حقًا
تتطور الأطراف الصناعية الروبوتية لتصبح أكثر قدرة كل عام، واعدةً ليس فقط باستعادة الحركة بعد فقدان الطرف بل أيضًا بالشعور بأنها جزء طبيعي من الجسد. ومع ذلك، هناك سؤال بسيط إلى حد ما لم يُدرس جيدًا: هل تغير السرعة التي يتحرك بها ذراع صناعي مستقل مدى شعور مرتديه بأنّه «طبيعي»، وآمن، وسهل الاستخدام؟ استُخدم الواقع الافتراضي في هذه الدراسة لاستكشاف كيف تشكّل سرعات الحركة المختلفة إحساس الناس بأن الذراع الروبوتية تنتمي إليهم، وتتحرك نيابة عنهم، وتتصرّف كشريك موثوق بدلاً من آلة مرتجفة.
تجريب ذراع روبوتية افتراضية
لمعالجة هذا السؤال، وضع الباحثون متطوعين في بيئة واقع افتراضي غامرة ومنحوهم جسدًا رقميًا يعاني من بتر في الساعد الأيسر. في العالم الافتراضي، استُبدِل الجزء المفقود من الذراع بساق روبوتية أنيقة يمكنها الانثناء من تلقاء نفسها. كانت المشاركات والمشاركون يتحكمون في الجزء العلوي من الذراع والكتف، لكن عندما يقترب الكوع الافتراضي بما فيه الكفاية من هدف متوهج، يتدخل الساعد الاصطناعي تلقائيًا لإكمال الوصول. اتبعت الحركة مسارًا ناعمًا من نوع «الحد الأدنى من الارتجاج»، وهو نوع من المقاطع المنحنية بلطف المعروفة بأنها تشبه الحركة البشرية الطبيعية.

ست سرعات مختلفة، ومهمة واحدة بسيطة
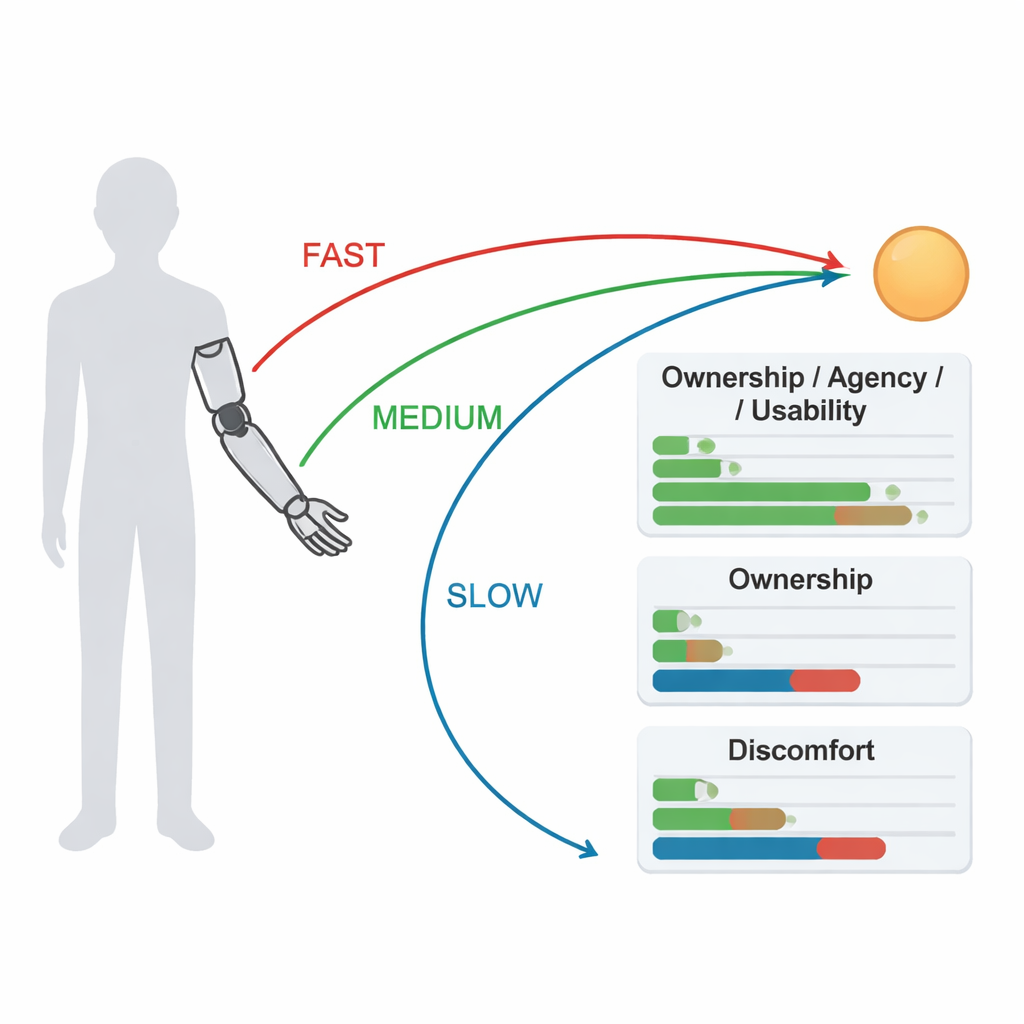
التغييرة الرئيسية كانت أن انثناء الساعد الاصطناعي الآلي يمكن أن يكون سريعًا جدًا أو بطيئًا جدًا. اختبر الفريق ست مدد للحركة، من سرعة فائقة تبلغ 125 ملي ثانية إلى وتيرة راحتها 4 ثوانٍ، مع عدة درجات بينها. في كل حالة سرعة، أدى المتطوعون سلسلة من محاولات الوصول، محاولين لمس أهداف تظهر بأسرع ما يمكن. بعد كل كتلة من المحاولات، قيّموا مدى شعورهم بأن الذراع تخصهم (امتلاك الجسد)، ومدى شعورهم بأن الحركات كانت «حركاتهم» (إحساس بالقدرة على الفعل)، ومدى قابلية استخدام النظام، وكيف حصلت الذراع على سمات اجتماعية روبوتية مثل الكفاءة والدفء وعدم الارتياح. كما قاس الباحثون سرعة تحرك الجزء العلوي من ذراعهم الحقيقي نحو الهدف قبل أن يتدخل الطرف الاصطناعي.
سرعة متوسطة تشعر أنها جزء من الجسد أكثر
أظهرت النتائج صورة واضحة: مدة حركة متوسطة تبلغ حوالي ثانية واحدة أنتجت أقوى إحساس بامتلاك الجسد والقدرة على الفعل، وكذلك أعلى درجات سهولة الاستخدام. عندما تحرك الطرف الاصطناعي إما أسرع بكثير (125 مللي ثانية) أو أبطأ بكثير (4 ثوانٍ)، شعر الناس أقل بأنّه جزء من أجسادهم وأقل أنّه يتصرف نيابةً عنهم. كما أن حركة أسرع بقليل تبلغ نصف ثانية أدت أداءً جيدًا أيضًا، محافظةً على امتلاك وقدرة على الفعل مرتفعتين مقارنةً بالنهايات. تشير هذه النمطية إلى وجود نقطة توازن في السرعة حيث يشعر الطرف المستقل بأنه طبيعي ومفيد في آن واحد، وأن التعجّل أو التراخي في الحركة يجعل من الصعب على الدماغ دمج الجهاز في صورة الجسد.
الراحة والكفاءة وكيف يتكيّف الناس
كانت الطريقة التي شكّلت بها سرعة الذراع «شخصيتها» مكشوفة بنفس القدر. قُيّمت الحركات ذات السرعات المتوسطة على أنها أكثر كفاءة من أبطأ الحركات، بينما جعلت الحركات الأسرع جدًا الناس يشعرون بأقصى درجات عدم الارتياح، بما يتناغم مع نتائج سابقة مع روبوتات مستقلة. من المثير للاهتمام أن تقييمات «الدفء» —بالمعنى التقريبي لمدى ودّية وقابلية الاقتراب من الذراع— لم تتغير كثيرًا مع السرعة. كما غيّر الناس سلوكهم بشكل طفيف: عندما تحرّك الطرف الاصطناعي ببطء، كانوا يميلون إلى تحريك ذراعهم العلوية الحقيقية ببطء أكثر نحو الهدف، كأنهم يطابقون إيقاع الروبوت دون وعي. يلمح هذا التكيّف إلى أنه بمجرد أن يتجسد الطرف المستقل جزئيًا، قد يضبط المستخدم حركاته الخاصة للتنسيق معه بشكل أفضل.
ماذا يعني هذا لأطراف المستقبل الصناعية
لغير المتخصصين، الخلاصة بسيطة: سرعة حركة طرف صناعي مستقل ليست مجرد إعداد تقني؛ فهي تشكّل مباشرة ما إذا كان المستخدم يشعر أن الجهاز جزء حقيقي منه وما إذا كان يشعر بأنه آمن وكفء. في هذه الدراسة على واقع افتراضي مع مشاركين أصحاء، بدت الحركات التي تستغرق حوالي ثانية واحدة أكثر توازنًا، مما عزز مشاعر الامتلاك والتحكم وسهولة الاستخدام مع تجنّب الانزعاج الذي تسببه الحركات فائقة السرعة. مع دخول أطراف صناعية وأجهزة روبوتية قابلة للارتداء أكثر تقدمًا إلى الحياة اليومية، قد يكون ضبط سرعة الحركة بعناية — والحفاظ عليها ضمن نطاق بشري ومريح — أمرًا مهمًا بنفس قدر إضافة المزيد من الحساسات أو خوارزميات أذكى إذا أردنا أن تكون هذه الأجهزة أدوات فعالة وتمتدّات حقيقية قابلة للعيش من الجسد.
الاستشهاد: Hapuarachchi, H., Inoue, Y., Shigemasu, H. et al. Movement speed of an autonomous prosthetic limb shapes embodiment, usability and robotic social attributes in virtual reality. Sci Rep 16, 7750 (2026). https://doi.org/10.1038/s41598-026-38977-8
الكلمات المفتاحية: أطراف صناعية, الواقع الافتراضي, التجسّد, التفاعل بين الإنسان والروبوت, سرعة الحركة