Clear Sky Science · ar
استراتيجية إعادة بناء بيانات مسار المركبات للتعرف بالفيديو بناءً على طريقة ذات خطوتين للتصفية بالاستيفاء
لماذا تنظيف بيانات المرور الرقمية مهم حقًا
في كل مرة تراقب فيها كاميرا مرور تحرك السيارات عبر تقاطع، تولد تدفقًا خفيًا من البيانات يصف إلى أين تذهب كل مركبة، وما سرعتها، وكيف تتسارع أو تكبح. هذه المعلومات ثمينة من أجل طرق أكثر أمانًا، وإشارات مرور أذكى، وسيارات ذاتية القيادة في المستقبل. لكن في الواقع تكون هذه البيانات فوضوية: تختفي السيارات خلف شاحنات، تتوهج المصابيح الأمامية في المطر، وتخطئ أنظمة الرؤية الحاسوبية. تتعامل هذه الدراسة مع سؤال عملي للغاية: كيف نحول تلك البيانات الفيديوية المعيبة إلى سجل موثوق لكيفية تحرك المركبات فعليًا؟
عندما تقرأ الكاميرات حركة السيارات بشكل خاطئ
تتسم التتبع المبني على الفيديو بالجاذبية لأنه رخيص وغير تدخل ويغطي مساحات واسعة. ومع ذلك، فإن المخرجات الخام مليئة بمشكلتين رئيسيتين. الأولى أخطاء واضحة، مثل سيارة يبدو أنها تقفز إلى الخلف، أو تتوقف فورًا من سرعة الطريق السريع، أو تظهر اندفاعات تسارع مستحيلة. تنتج هذه عادة عن الحجب، الطمس الحركي، أو فقدان برنامج التتبع للمركبة لفترة وجيزة. المشكلة الثانية هي الاهتزاز العشوائي—تذبذبات صغيرة وسريعة في الموضع المبلغ عنه. عندما تُحتسب السرعات والتسارعات من تلك المواضع، تتضخم التذبذبات، مما يجعل القيادة الطبيعية تبدو متقلبة. إذا تُركت دون تصحيح، يمكن أن تحرف هذه المشكلات نماذج المرور بأكثر من 40 بالمئة، مما قد يضلل دراسات السلامة وأنظمة القيادة الآلية.
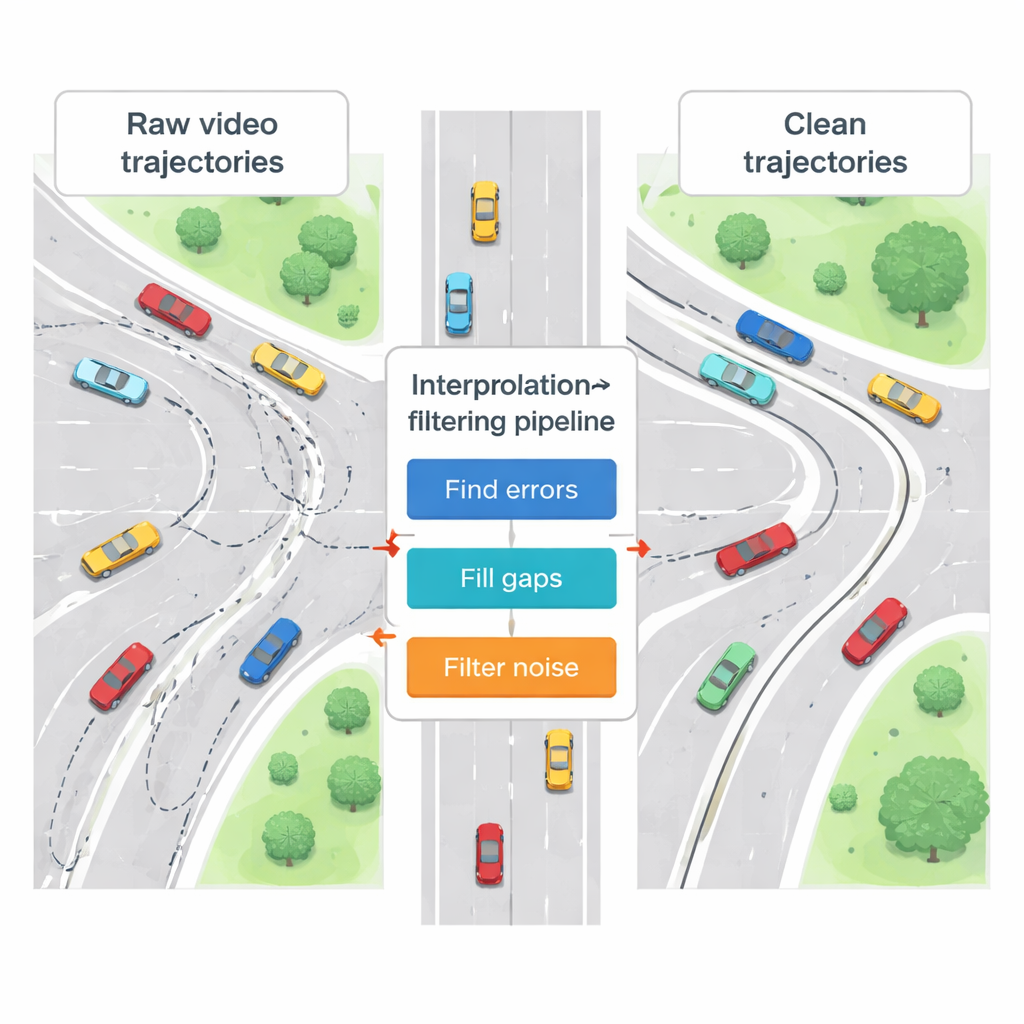
خطة تنظيف من خطوتين
لإصلاح هذا الضرر، يقترح المؤلفون استراتيجية إعادة بناء من خطوتين تعمل كأنها ميكانيكي رقمي دقيق. تركز الخطوة الأولى على الأخطاء الواضحة: تفحص سجل كل مركبة بحثًا عن سرعات وتسارعات تخالف حدودًا فيزيائية بسيطة، مثل تغيير التسارع المفاجئ جدًا (jerk) أو تسارع يتجاوز ما يمكن لسيارة وسائق حقيقي تحمله. بمجرد العثور على هذه النقاط الشاذة، تُستبدل باستخدام أدوات رياضية تُسمى الاستيفاء، التي تقدّر القيم المفقودة من نقاط قريبة وأكثر موثوقية. تقارن الدراسة عدة نكهات من الاستيفاء وتجد أن نهجًا يُعرف بالاستيفاء من نوع هيرميت يحافظ بشكل أفضل على الشكل الطبيعي للمسار مقارنة بطريقة لاجرانج التقليدية، خصوصًا عندما تكون الحركة معقدة.
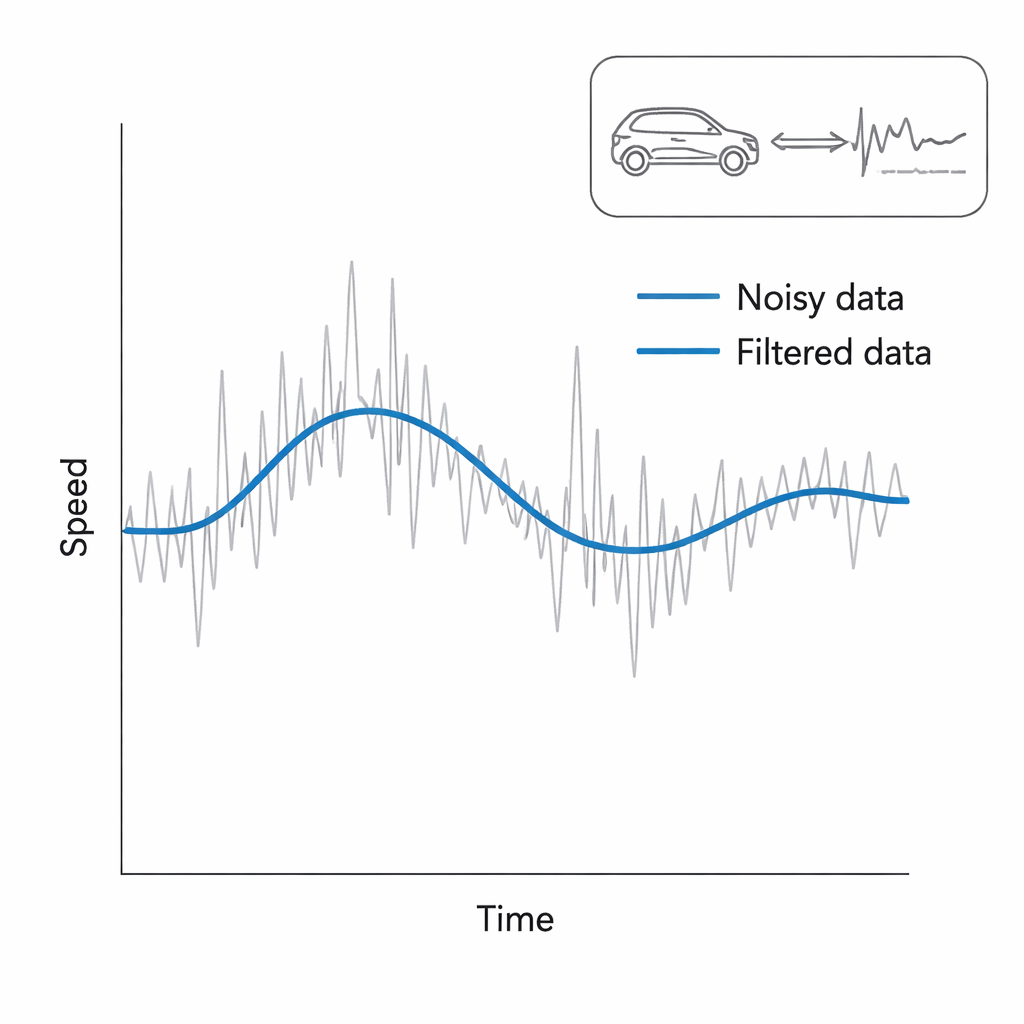
تنعيم الرحلة الرقمية
تتعامل الخطوة الثانية مع المشكلة الأكثر دقة المتمثلة في الضوضاء. حتى بعد تصحيح الأخطاء الكبيرة، يمكن أن تظل الآثار المتبقية تبدو مهتزة قليلًا. هنا يختبر الباحثون طريقتين لتنعيم البيانات: طريقة محسنة للمتوسط المتحرك تعطي وزنًا أكبر للنقاط الأخيرة، وتقنية إحصائية تعرف بمرشح كالمان، الذي يحدث باستمرار أفضل تقدير لموضع المركبة وسرعتها الحقيقية مع وصول قياسات جديدة. كلتا التقنيتين تهدئان الاهتزاز، لكن مرشح كالمان يقوم بعمل أفضل في متابعة التغيرات الحقيقية في القيادة—مثل فرملة لطيفة أو تغيير مسار—دون طمسها. النتيجة وصف أكثر سلاسة وواقعية لكيفية تصرّف كل مركبة عبر الزمن.
اختبار المنهج
يطبق الفريق إطار عملهم على فيديو حقيقي مُلتَقَط عند تقاطع حضري مزدحم في تشنغتشو، الصين، باستخدام برامج اكتشاف وتتبع كائنات حديثة لاستخراج مسارات المركبات. ثم يمررون عشرات من آثار المركبات المختلفة عبر عمليتهم ذات الخطوتين ويقيسون النجاح باستخدام مقاييس فيزيائية بسيطة: مدى تقلب التسارع، وعدد المرات التي يتجاوز فيها الـjerk مستوى يعتبر غير واقعي للسيارات الركاب. كما يقارنون المسارات المنقحة المستخرجة من الفيديو ببيانات الحقيقة الأرضية المسجلة مباشرة من أدوات لوحة عدادات السيارة. عبر أنماط قيادة متعددة—قيادة ثابتة، كبح قوي، تغييرات مسار—تقلل الاستراتيجية المجمعة من الاستيفاء والتصفية تباين التسارع بحوالي 85 بالمئة وتلغي تقريبًا ذروات الـjerk غير المعقولة، مع تطابق أقرب مع سجلات الأدوات مقارنة بعدة طرق متنافسة.
ماذا يعني هذا للسفر اليومي
بعبارات بسيطة، تُظهر هذه المقالة كيفية تحويل لقطات غير كاملة من كاميرات المرور العادية إلى بيانات يمكن للمهندسين والمركبات الآلية الوثوق بها فعليًا. من خلال إصلاح الأعطال الواضحة أولًا ثم تنعيم الضوضاء بعناية، تنتج الطريقة المقترحة آثارًا رقمية أكثر واقعية لحركة السيارات، دون الحاجة إلى أجهزة غريبة أو قوة حوسبة هائلة. يمكن أن تغذي تلك الصورة الأنظف توقيت إشارات مرور أفضل، ومحاكاة أكثر دقة للازدحام، وخوارزميات قيادة ذاتية أكثر أمانًا تعتمد على فهم سلوك القيادة في العالم الحقيقي. مع أن الدراسة تركز على مدينة واحدة ولا تغطي بعد كل أحوال الطقس أو الطرق، إلا أنها تمهد طريقًا واضحًا وعمليًا لاستخدام شبكات الفيديو الحالية كحساسات موثوقة للجيل القادم من أنظمة النقل الذكية.
الاستشهاد: Ding, S., Zhang, S., Peng, F. et al. Reconstruction strategy of vehicle trajectory data for video recognition based on a two-step method of interpolation filtering. Sci Rep 16, 7428 (2026). https://doi.org/10.1038/s41598-026-38947-0
الكلمات المفتاحية: مسار المركبة, بيانات فيديو المرور, تنقية البيانات من الضوضاء, النقل الذكي, القيادة الذاتية