Clear Sky Science · ar
تحكم عصبي تكيفي معتمد على رصد الاضطرابات الموسعة (ESO) لطائرة رباعية المراوح مقابل اضطرابات الرياح والحمل
حفاظ الطائرات بدون طيار على ثباتها في عالم فوضوي
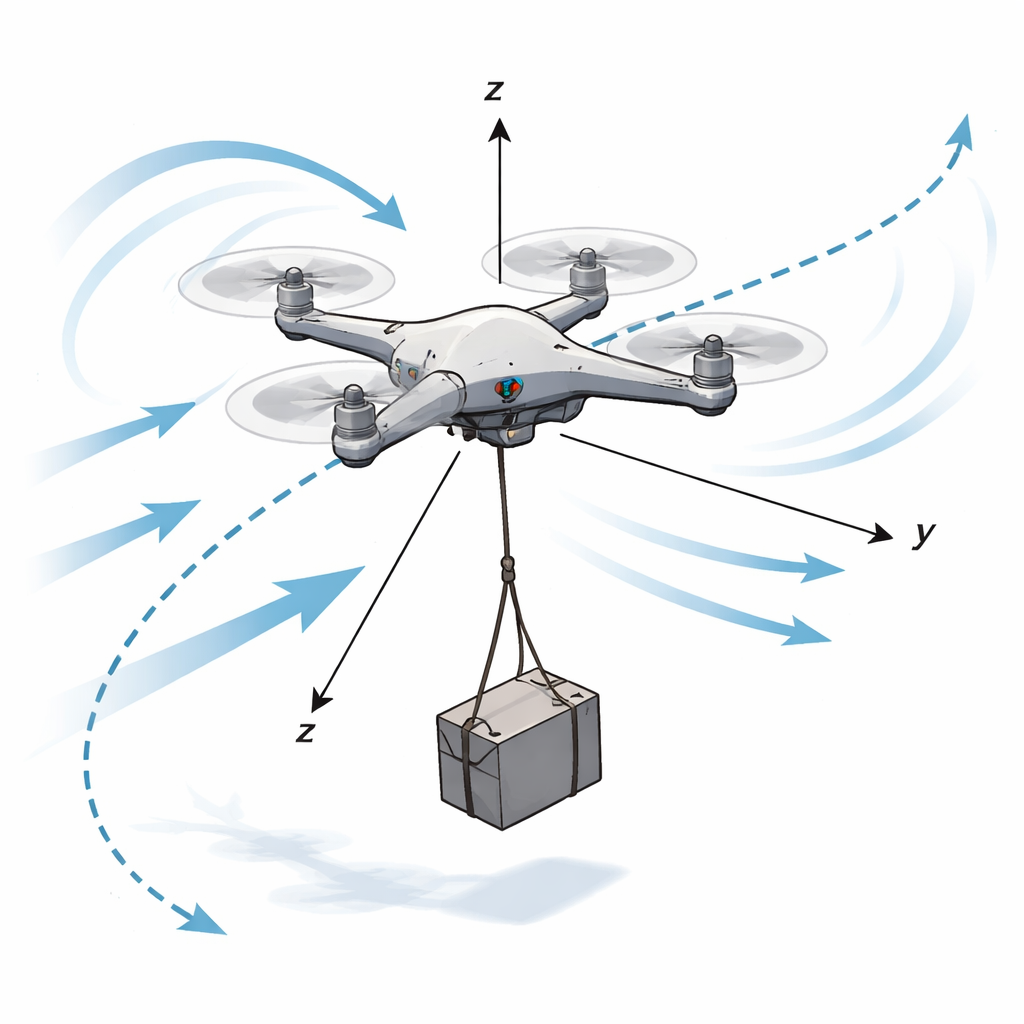
تُستخدم الطائرات الصغيرة ذات الأربع مراوح بشكل متزايد في مهام مثل فحص الجسور، ومراقبة المحاصيل، ونقل الطرود الصغيرة. لكن في العالم الحقيقي تواجه هذه الروبوتات الطائرة هبات هواء وعزوم أرجوحة للحمولات المعلقة تحتها، وكلاهما قد يخرجها بسهولة عن مسارها. تقدم هذه الورقة طريقة جديدة للحفاظ على طيران هذه الطائرات بسلاسة على المسارات المخططة، حتى عندما يكون الهواء عاصفًا وتجرها حمولة متأرجحة.
لماذا تكون الرياح والحمولات المعلقة مشكلة كبيرة
التحكم بطائرة رباعية المراوح صعب بطبيعته. فهي خفيفة، وتستجيب بسرعة لتغيرات طفيفة في المحركات، وحركاتها في الاتجاهات المختلفة مترابطة بشدة. عندما تضرب الرياح القوية أو المتغيرة بسرعة الطائرة، فإنها تدفعها بشكل غير متوقع. وإضافة حمولة معلقة بكابل، مثل حاملة كاميرا أو زجاجة سائلة، يزيد المشكلة: فقد تتأرجح الحمولة كالبندول وتعيد قوى إضافية إلى الطائرة. المتحكمات التقليدية، مثل أسلوب PID الشائع أو مخططات الانزلاق والارتداد الأكثر تقدمًا، تعمل جيدًا فقط عندما يعرف المهندسون فيزياء الطائرة بدقة وعندما تكون الاضطرابات معتدلة. إذا كان النموذج الرياضي غير دقيق، أو إذا تغيرت قوى الرياح والحمولة بطرق معقدة، فقد تؤدي هذه الأساليب إلى استجابات بطيئة، أو تجاوز الهدف، أو ارتعاش واضح أثناء الطيران.
مراقب ذكي للاضطرابات المخبأة
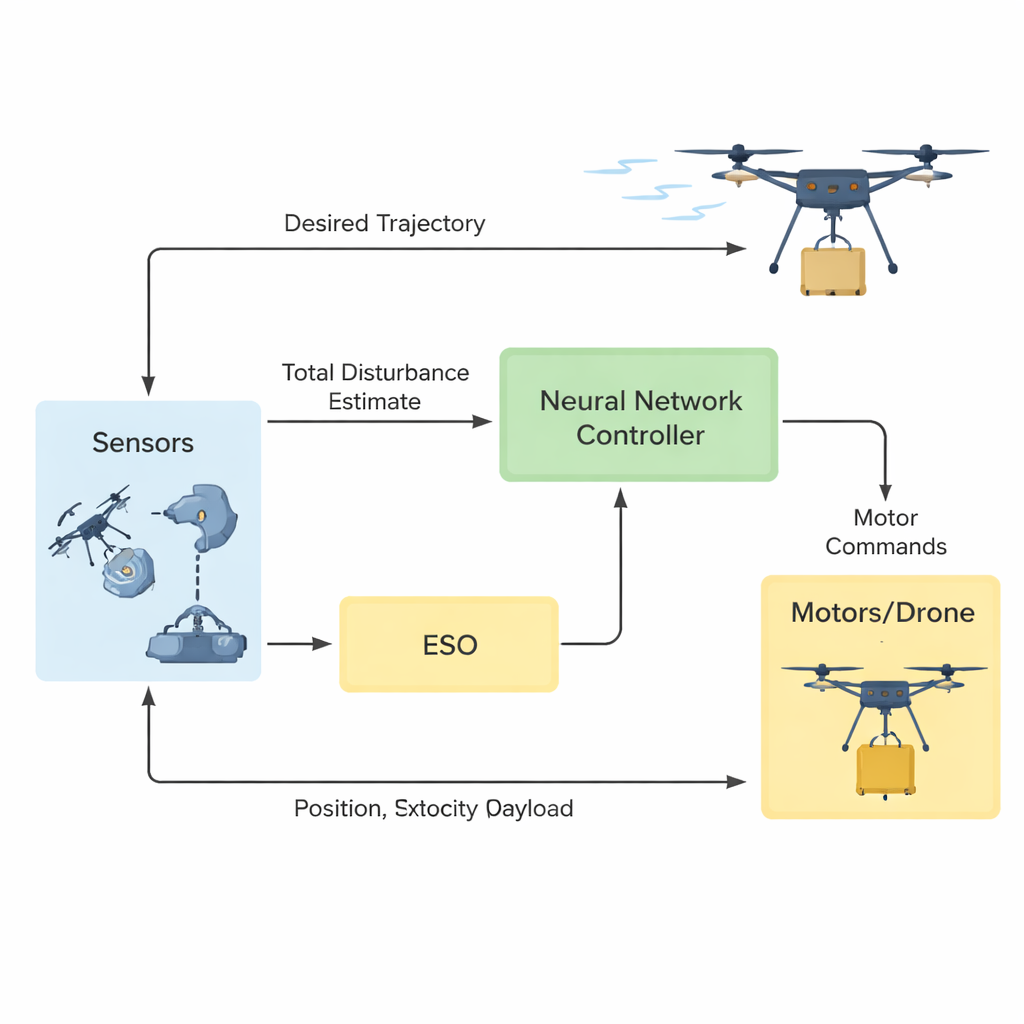
لمعالجة ذلك، يبني المؤلفون على مفهوم يُسمى مقاومة الاضطرابات النشطة. بدلاً من محاولة نمذجة كل تفصيلة من تفاصيل الرياح والحمولة المتأرجحة، يعاملون كل التأثيرات المجهولة معًا باعتبارها «اضطرابًا مجمَّعًا» واحدًا. يعمل مراقب الحالة الموسع المصمم خصيصًا كنوع من الحارس الرياضي، يستنتج باستمرار هذا الاضطراب الكلي من حركات الطائرة. ويجدر بالذكر أن هذا المراقب مضبوط بمعامل رئيسي واحد فقط، مما يبسط الإعداد كثيرًا مقارنة بالتصاميم الموجودة. تُظهر النظرية أنه مع ضبط مناسب، يتقارب تقدير المراقب للاضطراب بسرعة ويظل محدودًا بصورة محكمة، ما يعني أنه يمكن الاعتماد عليه كتصحيح أمامي في الزمن الحقيقي بدلًا من كونه مجرد تقدير تقريبي.
ترك الشبكة العصبية لتتعلم الأجزاء الصعبة
حتى مع تقديرات جيدة للاضطراب، لا يزال المتحكم بحاجة لمعرفة الكيفية التي تحول بها محركات الطائرة الأوامر إلى حركة فعلية — علاقة تعتمد على الكتلة والهندسة وغير ذلك من الخصائص الفيزيائية التي قد تتغير مع الوقت. بدلًا من الاعتماد على نموذج تم تحديده بعناء، يقدم المؤلفون شبكة عصبية ذات دوال أساس شعاعية تتعلم هذه العلاقة مباشرة من إشارات الطيران. لا يحتاج المتحكم أكثر من معرفة موقع الطائرة، والمكان الذي يجب أن تذهب إليه، والمشتقة الثانية للمسار المطلوب (أي مدى تسارع النقطة المستهدفة). تقوم قاعدة تكيفية بتحديث أوزان الشبكة العصبية داخليًا باستمرار لتقليل أخطاء التتبع. وباستخدام تحليل قائم على لياپونوف، يبرهن المؤلفون أنه تحت هذا القانون التكيفي تظل أخطاء التتبع مقيدة بشكل موحد ويمكن جعلها صغيرة قدرما شاءوا، بينما تظل تحديثات الأوزان مستقرة.
تجربة الطريقة على أرض الواقع
تحقق الفريق من منهجهم من خلال محاكاة حاسوبية وتجارب حقيقية. في المحاكاة طُلب من الطائرة اتباع مسارات حلزونية ثلاثية الأبعاد صعبة بينما تتعرض لهبات رياح عشوائية وقوى حمولة تتغير مع الزمن. قورن المتحكم الجديد مع ثلاث طرق متقدمة أخرى: مقاومة الاضطرابات النشطة الخطية، التحكم بنمط الانزلاق، التحكم بنمط الانزلاق النهائي الخالي من النموذج، وفي اختبار أصعب، التحكم التكيفي من الرتبة الكسرية. عبر سيناريوهات متعددة، حققت الطريقة المقترحة مسارات أكثر سلاسة وأخطاء جذر-متوسط-تربيعي في الموضع أصغر، خصوصًا بعد إدخال الاضطرابات. في الاختبارات المادية، طار الباحثون بطائرة رباعية المراوح داخل صالة بينما كان مروحتان صناعتان تضخان الهواء نحوها وزجاجة ماء بوزن 200 غرام معلقة تحتها. سجَّلت كاميرات التقاط الحركة موضع الطائرة. حتى تحت رياح مستمرة وجذب يدوي للحمولة، حافظت الطائرة على نقطة الهدف ضمن بضعة سنتيمترات وبقيت أوامر المحركات متزنة، مما يشير إلى أن الطريقة عملية للاستخدام على معدات حقيقية.
ما الذي يعنيه هذا للاستخدام اليومي للطائرات بدون طيار
بالنسبة لغير المتخصصين، الخلاصة هي أن هذا العمل يقدم وسيلة لجعل الطائرات أكثر موثوقية في ظروف صعبة دون حاجة لمعرفة مثالية بفيزياءها الداخلية. من خلال الجمع بين مراقب اضطراب بسيط لكن قوي ومتحكم قائم على التعلم، يمكن للنظام التكيف أثناء الطيران مع هبات الرياح والحمولات المتأرجحة، وحفظ الطائرة على المسار مع جهد ضبط قليل. يمكن أن يسهل هذا النوع من التحكم القوي وخفيف النموذج نشر الطائرات لأداء مهام روتينية في المدن والمزارع والمصانع، وقد تمتد نفس الأفكار في النهاية إلى فرق من الطائرات وتصاميم قادرة على مقاومة الأعطال تحافظ على الطيران بأمان حتى عند فشل بعض المكونات.
الاستشهاد: Cai, X., Dai, J., Liu, F. et al. ESO based adaptive neural network control for a quadrotor against wind and payload disturbances. Sci Rep 16, 7758 (2026). https://doi.org/10.1038/s41598-026-38931-8
الكلمات المفتاحية: تحكم الطائرة الرباعية, استقرار الطائرة بدون طيار, اضطراب الرياح, متحكم الشبكة العصبية, تتبع الحمولة