Clear Sky Science · ar
تحكم موجه دينامياً محسّن لطريقة المطاردة النقية للروبوتات المتنقلة الذاتية وتطبيقه للملاحة الآمنة في المصانع الكيميائية
روبوتات تبقى على المسار
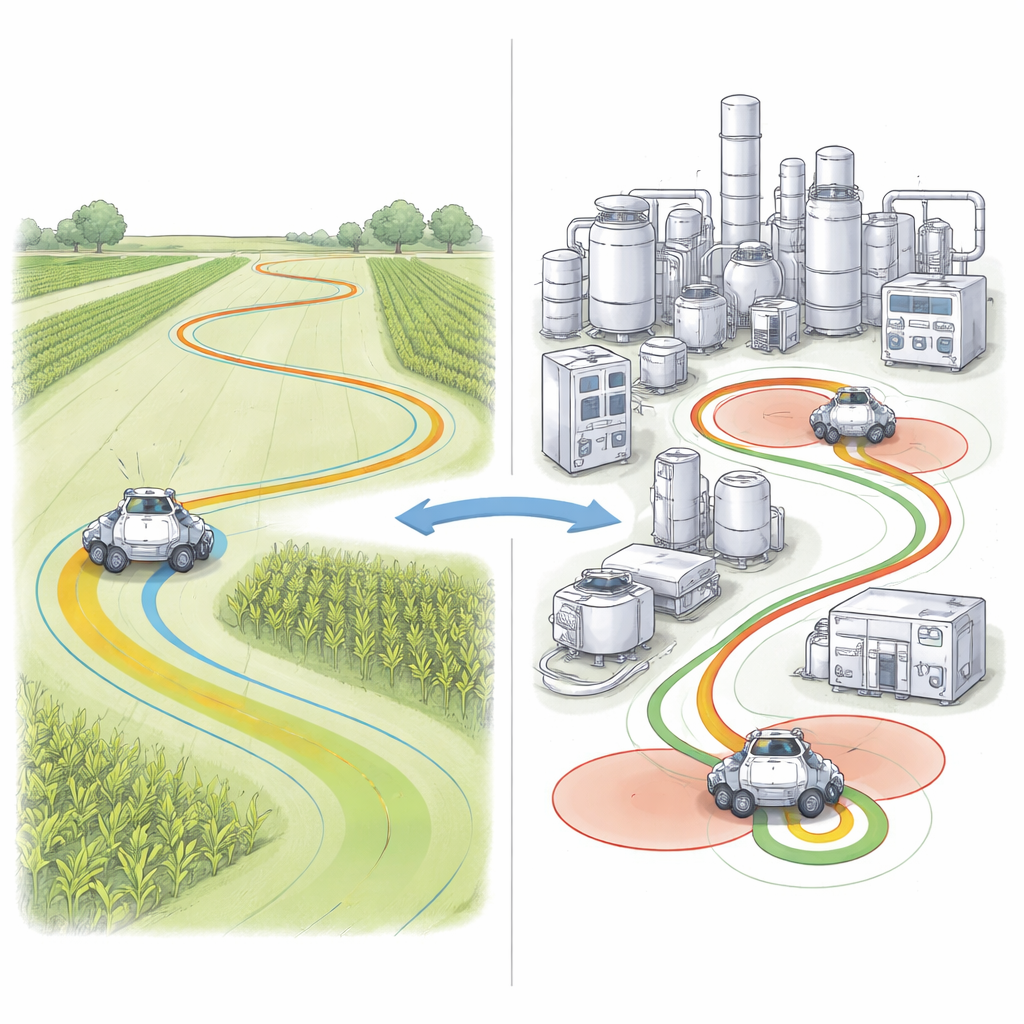
مع انتقال الروبوتات من صالات المصانع النظيفة إلى الحقول والمصانع الكيميائية، يجب أن تتبع مسارات ضيقة بدقة عالية. هزة صغيرة قد تسحق المحاصيل أو تصطدم بالأنابيب أو تنزلق إلى منطقة تحوي غازات قابلة للاشتعال. تشرح هذه الورقة طريقة جديدة لقيادة روبوتات العجلات والتحكم في سرعتها بحيث تبقى قريبة من المسار المخطط له سواء في الأماكن الواسعة أو المواقع الصناعية المكتظة.
لماذا توجيه الروبوت صعب
تستخدم العديد من الروبوتات المتنقلة الذاتية اليوم قاعدة بسيطة تسمى «المطاردة النقية» لمتابعة المسار. ينظر الروبوت لمسافة قصيرة أمامه على المسار، يوجه نفسه نحو تلك النقطة، ويكرر هذه العملية بسرعة. عملياً، على المهندسين أن يقرروا مدى المسافة التي «ينظر» إليها الروبوت وسرعته. إذا كانت مسافة النظر قصيرة جداً، يتصرف الروبوت بعصبية وقد يتلوى من جانب إلى آخر. وإذا كانت طويلة جداً، يتأخر في الاستجابة ويقصر الزوايا، خصوصاً في المنحنيات الضيقة أو عند سرعات أعلى. في الخارج تنشأ مشكلة إضافية: يُقدَّر موقع الروبوت بدمج إشارات الأقمار الصناعية وأجهزة القياس الحركية وبيانات دوران العجلات، وكلٌ منها له أخطاؤه وتأخُراته الخاصة.
طريقة أذكى للتوجيه وتحديد السرعة
يقترح المؤلفون طريقة محسّنة اسمها المطاردة النقية مع التحكم الديناميكي بالتوجيه (PP-DSC). بدلاً من إبقاء مسافة النظر والسرعة ثابتتين، يضبط الروبوت كلاهما في الزمن الفعلي اعتماداً على مدى حدة الدوران. عندما تكون زاوية التوجيه صغيرة والمسار شبه مستقيم، يستخدم الروبوت مسافة نظر أطول وسرعة أعلى للسفر بسلاسة وكفاءة. كلما زادت زاوية التوجيه في المنحنيات، تقصر مسافة النظر وتنخفض السرعة تلقائياً، مما يمنح الروبوت مزيداً من الوقت للاستجابة ويقلل انجرافه الجانبي. تم تنفيذ هذا السلوك على روبوت بأربع عجلات يشبه السيارة يستخدم إطار عمل برمجيات روبوتية حديثاً إلى جانب تحديد موقع عالي الدقة بالأقمار الصناعية ومستشعر قصور ذاتي ومشفرات العجلات لتقدير حركته.

الاختبار في الحقول والمصانع الكيميائية الافتراضية
لاختبار أداء PP-DSC، أجرت الفريق تجارب خارجية على ثلاثة مسارات أساسية: خط مستقيم، حلقة، وشكل ثمانية، عند سرعات من 1 إلى 5 أمتار في الثانية. وقارنوا الطريقة الجديدة مع نهج المطاردة النقية التقليدي. حافظ المتحكم المحسّن على الروبوت أقرب بكثير إلى المسار المقصود في كل الحالات. على الخطوط المستقيمة انخفض متوسط الخطأ الجانبي إلى نحو خمسة سنتيمترات، وعلى المسارات المنحنية بقي الخطأ أقل من ثمانية سنتيمترات. في المقابل، قد ينحرف الأسلوب التقليدي بمقدار عدة عشرات من السنتيمترات ويظهر قمماً أكبر عند دخول أو مغادرة الانحناءات، خصوصاً عند السرعات الأعلى.
إضافة أمان في مناطق الخطر
سأل الباحثون أيضاً كيف قد يتصرف مثل هذا الروبوت داخل مصنع كيميائي، حيث قد يُكلف بتفتيش مفاعلات ساخنة أو نقل عينات. بدلاً من بناء بيئة اختبار صناعية كاملة، استخدموا نموذج حاسوبي مفصل لمصنع بيوديزل تضمن مواقع المعدات ومناطق ذات مخاطر أعلى للحريق والانفجار. وسعوا متحكمهم بعامل أمان يُبطئ الروبوت تلقائياً عند تحركه داخل هذه المناطق الخطرة، استناداً إلى مؤشر قياسي للحريق والانفجار مستخدم في سلامة العمليات. أظهرت المحاكاة أن النسخة الواعية بالسلامة من PP-DSC زادت خطأ المتابعة زيادة طفيفة جداً—أقل من واحد بالمئة في المتوسط—مع ضمان تقليل الروبوت لسرعته حول المعدات الخطرة.
اختيار الأداة المناسبة لكل مهمة
اكتشاف مثير للاهتمام هو أنه لا توجد استراتيجية توجيه واحدة هي الأفضل في كل الأماكن. في الحقول المفتوحة ذات المنحنيات اللطيفة، تفوقت الطريقة الديناميكية بوضوح على النهج التقليدي، محافظة على مسار الروبوت مشدوداً وسلساً حتى عند السرعات الأعلى. ومع ذلك، في هندسة المصانع الكيميائية الضيقة أحياناً قد تكون المطاردة النقية البسيطة بمسافة نظر ثابتة أفضل، خصوصاً على الحلقات الضيقة ومسارات «الشكل ثمانية» المتقاطعة التي قد تؤدي فيها مسافة النظر الديناميكية إلى توجيه الروبوت عن غير قصد إلى فرع خاطئ من المسار. يخلص المؤلفون إلى أن الروبوتات ينبغي أن تتبدل بين الاستراتيجيات اعتماداً على شكل المسار: استخدام المتحكم المحسّن المدمج بالسلامة للمنحنيات المعتدلة والتنقل الواعي بالمخاطر، والرجوع إلى مخطط مسافة النظر الثابتة للمسارات الضيقة أو المتقاطعة جداً. للغير متخصصين، الرسالة الأساسية هي أن الملاحة الآمنة والموثوقة للروبوت في المصانع والحقول الحقيقية لا تتعلق فقط بالخرائط والمستشعرات الجيدة—بل إن طريقة اختيار الروبوت لنقطة النظر وسرعته لا تقل أهمية.
الاستشهاد: Promkaew, N., Junhuathon, N., Phuphaphud, A. et al. Enhanced pure pursuit with dynamic steering control for autonomous mobile robots and application to safe navigation in chemical plants. Sci Rep 16, 8820 (2026). https://doi.org/10.1038/s41598-026-38695-1
الكلمات المفتاحية: الروبوتات المتنقلة الذاتية, متابعة المسار, تحكم التوجيه, ملاحة GNSS-RTK, سلامة المصانع الكيميائية