Clear Sky Science · ar
كشف الأهداف خفيف الوزن وتتبع الأهداف المتعددة لتفتيش الطائرات بدون طيار في المناجم المكشوفة
عيون أذكى في السماء
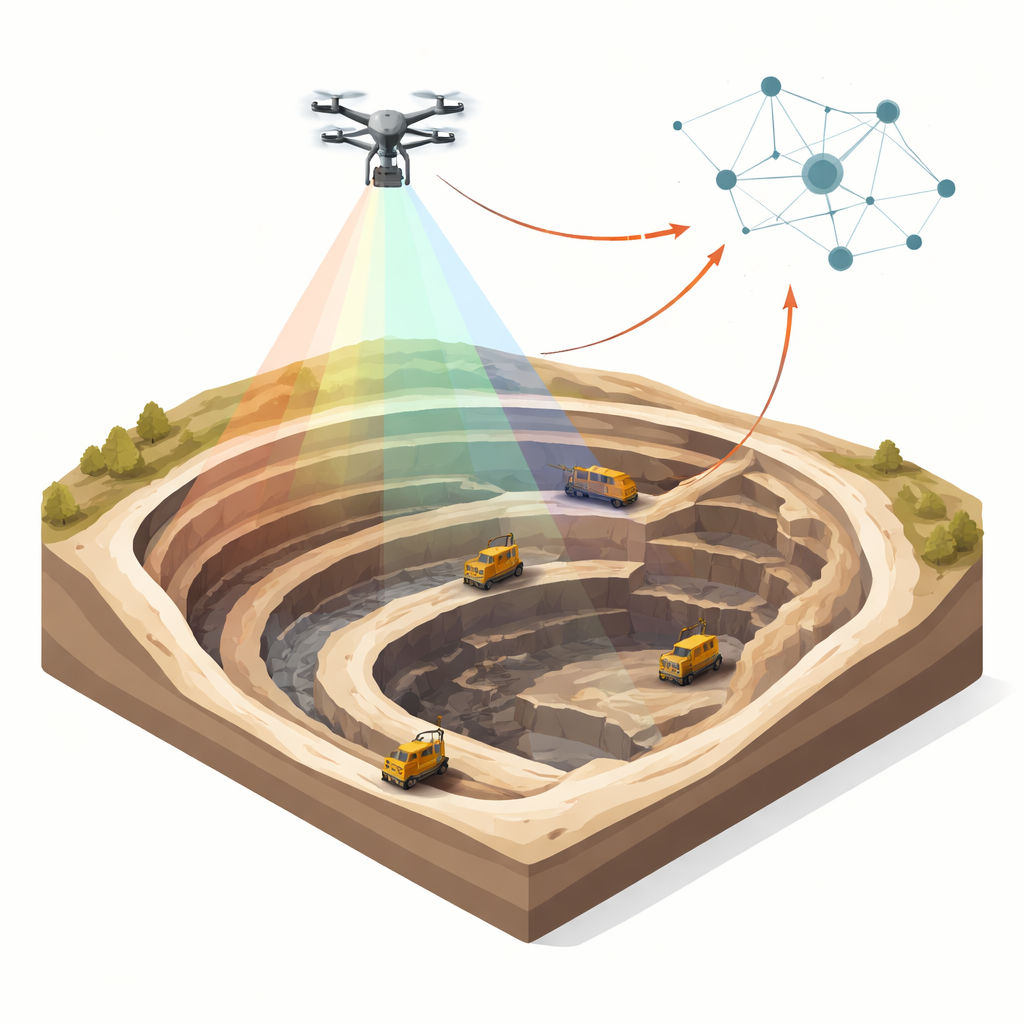
المناجم المكشوفة واسعة وقاسية، حيث تتحرك الشاحنات الثقيلة والحفارات والأشخاص باستمرار. الحفاظ على السلامة وسير العمل عادة ما يتطلب العديد من العمال على الأرض وتجهيزات تحديد مواقع مكلفة، ومع ذلك يمكن أن تفلت أعطال بسيطة ودخلاء. يستكشف هذا البحث كيف يمكن للطائرات الخفيفة الذكية أن تقوم بدوريات فوق هذه المناجم، مكتشفةً تلقائياً المعدات والأشخاص والمشكلات في الوقت الحقيقي بينما تعمل ضمن قيود الحوسبة الصارمة لأجهزة الطيران المحمولة.
لماذا تحتاج المناجم إلى مراقبة أفضل
تعتمد المناجم الحديثة بالفعل على أدوات مثل تحديد المواقع عبر الأقمار الصناعية ومنارات راديوية خاصة لتتبع الشاحنات والآلات. لكن هذه الأنظمة «النشطة» لها نقاط عمياء: قد تحجب الإشارات الجدران الشديدة الانحدار أو الغبار أو التداخل، وهي تعمل فقط على المركبات والأشخاص الذين يحملون الأجهزة المناسبة. كما أنها لا تستطيع إظهار شكل العطل نفسه. من ناحية أخرى، يمكن للطائرات أن تطير فوق التضاريس الصعبة، وتلتقط صوراً وفيديو غنياً، وتتابع أهدافاً غير متعاونة مثل المركبات المتسللة. التحدي هو أن خوارزميات الرؤية القوية تتطلب عادة حواسيب ثقيلة، بينما الطائرات لها قيود في الوزن والطاقة والقدرة على المعالجة. هدف المؤلفين كان تصميم نظام كشف وتتبع دقيق وخفيف بما يكفي ليعمل مباشرة على الطائرة.
تعليم الطائرات رؤية الأهداف الصغيرة والمخفية
جوهر العمل هو نسخة مطورة من نموذج رؤية شهير يُدعى YOLO، مكيّفة خصيصاً لبيئة المناجم المكشوفة. أعاد الباحثون تشكيل «الهيكل الخلفي» للنموذج ليتتبع الخطوط غير المنتظمة للشاحنات والحفارات وتلال الصخور، بدلاً من الاعتماد على مرشحات شبكية صارمة. أعادوا أيضاً تصميم الجزء من الشبكة الذي يمزج معلومات المقاييس الخشنة والدقيقة في الصورة، بحيث تُلتقط الآلات الصغيرة البعيدة والكبيرة القريبة معاً بدون تشويش. بالإضافة إلى ذلك، وحدة قرار جديدة وخفيفة الوزن تُركّز الانتباه على التفاصيل الأكثر إفادة في المشهد، مما يساعد النظام على تمييز نقاط العطل الصغيرة والآلات الجزئية الاختفاء عن الخلفية المزدحمة.
جعل النماذج القوية تلائم الطائرة
حتى مع هذه التحسينات، قد يكبر نموذج الرؤية بسهولة ليصبح أكبر من طاقة معدات الطائرة. لحل ذلك، طبق الفريق استراتيجية تشذيب مدروسة تحلل الاتصالات الداخلية الأكثر مساهمة في الأداء ثم تقصّ الباقي. تقلل هذه العملية عدد المعلمات وكمية الحساب مع الحفاظ على أقوى المسارات في الشبكة. عند مستوى تشذيب أمثل، يحافظ النظام على دقة كشف عالية مع تقليل حجم النموذج والعمليات وزمن الاستجابة بما يكفي للتشغيل على معالج مدمج مخصص، مستخدماً طاقة أقل ومطيلًا زمن الطيران. أظهرت الاختبارات على مجموعة بيانات منجمية مخصصة وعلى معيار علني للطائرات أن النموذج المُشذَّب يتفوق على عدة بدائل معروفة، خصوصاً في الأهداف الصغيرة والجزءياً المخفية.
من لقطات منعزلة إلى مسارات سلسة
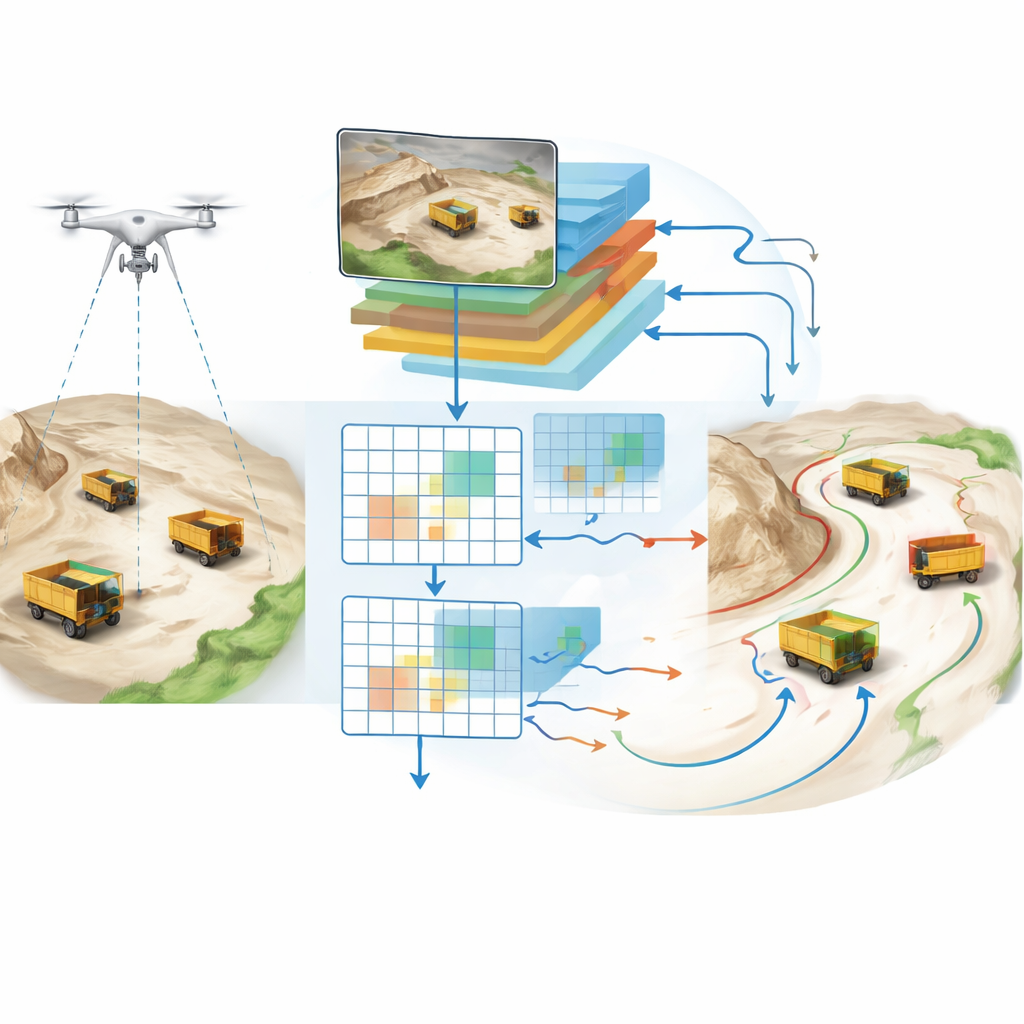
اكتشاف الأجسام في صورة واحدة هو نصف القصة؛ فالمناجم تحتاج أيضاً لمعرفة كيفية تحرك كل شاحنة أو شخص عبر الزمن. لذلك حسّن المؤلفون نهج تتبع الأجسام المتعددة القائم بحيث يتعامل بشكل أفضل مع المشاهد المزدحمة، والمركبات المتشابهة المظهر، والتغيرات المفاجئة في الحركة. أنشأوا مقياس تشابه مركب يأخذ بعين الاعتبار موقع الهدف، ومظهره، وحتى ما إذا بدا محملاً أو فارغاً. كما صححوا توقعات الحركة لتأخذ بعين الاعتبار تغير التسارع، مثل عندما تنعطف شاحنة أو تصعد منحدراً. معاً، تقلل هذه الخطوات من تبدلات الهوية—حيث يُخطأ في تمييز مركبة بأخرى—وتحافظ على خطوط تتبع سلسة وموثوقة، مع البقاء سريعاً بما يكفي للاستخدام في الوقت الحقيقي على أجهزة ملائمة للطائرات.
نحو دوريات منجمية دائمًا آلية
أخيراً، وضع المؤلفون وحدات الرؤية والتتبع داخل نظام تفتيش متعدد الطبقات يمكنه تنسيق عدة طائرات، وبث البيانات عبر شبكات 5G وروابط مخصصة، وتغذية النتائج إلى مركز التحكم الأرضي. في تجارب على مناجم حقيقية، حسّن هذا الإعداد بشكل واضح دقة واستقرار مراقبة المعدات مقارنة بالطرق التقليدية. بالنسبة لغير المتخصصين، الخلاصة أن الدراسة تُظهر مساراً عملياً لوجود روبوتات طائرة صغيرة وفعالة تحرس باستمرار مواقع صناعية ضخمة، مكتشفةً الأعطال الصغيرة والزوار غير المسجلين والوضعيات الخطرة قبل تفاقمها—دون الحاجة إلى حواسيب ضخمة أو شبكات كثيفة من المنارات على كل مركبة.
الاستشهاد: Liu, G., Zhang, L., Lei, J. et al. Lightweight target detection and multi target tracking for UAV inspection in open pit mines. Sci Rep 16, 8084 (2026). https://doi.org/10.1038/s41598-026-38676-4
الكلمات المفتاحية: تفتيش الطائرات بدون طيار, التعدين المكشوف, كشف الأجسام, تتبع الأجسام المتعددة, نماذج ذكاء اصطناعي خفيفة الوزن