Clear Sky Science · ar
نظام ضبابي من النوع 3 قائم على بنية افتراضية لاكتشاف أخطاء المستشعرات والمشغلات التنبؤية، والتعويض عنها، والتحكم في الأنظمة غير الخطية
إبقاء الآلات في المسار عندما تتعطل الأجزاء
تعتمد التقنيات الحديثة — من أذرع روبوتية في المصانع إلى محطات كيميائية تضبط الحموضة — على مستشعرات ومشغلات تحافظ على سير العمل بهدوء. لكن عندما تنحرف هذه الأجزاء أو تلتصق أو تتعطل، قد يصبح النظام غير آمن قبل أن يلحظ أحد ذلك. تقدم هذه الورقة طريقة جديدة لتمكين الآلات من اكتشاف وتصحيح مثل هذه المشاكل بنفسها، حتى عندما لا يتوفر للمهندسين نموذج رياضي دقيق لسلوك النظام الداخلي.
لماذا يصعب اكتشاف المشاكل الخفية
في العديد من البيئات الحقيقية، يكون سلوك النظام شديد اللاخطية: تغييرات صغيرة في المدخلات قد تتسبب في تقلبات كبيرة وغير متوقعة في المخرجات. تفترض طرق التحكم التقليدية أن المصممين يعرفون المعادلات التي تحكم هذا السلوك، وأن المستشعرات والمشغلات تعمل كما هو متوقع إلى حد كبير. عمليًا، تتقدم المكونات في العمر، وتزداد الضوضاء فيها، أو يتم استبدالها بأجهزة مختلفة قليلاً. تبني وحدات التحكم المقاوِمة للأخطاء التقليدية هوامش أمان ثابتة (طرق سلبية) أو تعتمد على نماذج دقيقة لاكتشاف الأخطاء والتعامل معها (طرق نشطة). كلا النهجين يواجه صعوبة عندما يتغير النظام مع الزمن أو عندما لا تكون آلياته الداخلية معروفة تمامًا. يجادل المؤلفون بأن الصناعة تحتاج إلى وحدات تحكم تتعلم من البيانات الحية، وتتعرف متى تسلك المستشعرات أو المشغلات سلوكًا خاطئًا، وتصحح تلك الأخطاء في الوقت الحقيقي دون الحاجة لمخطط تفصيلي للنظام.
وحدة تحكم متعلمة تعامل النظام كصندوق أسود
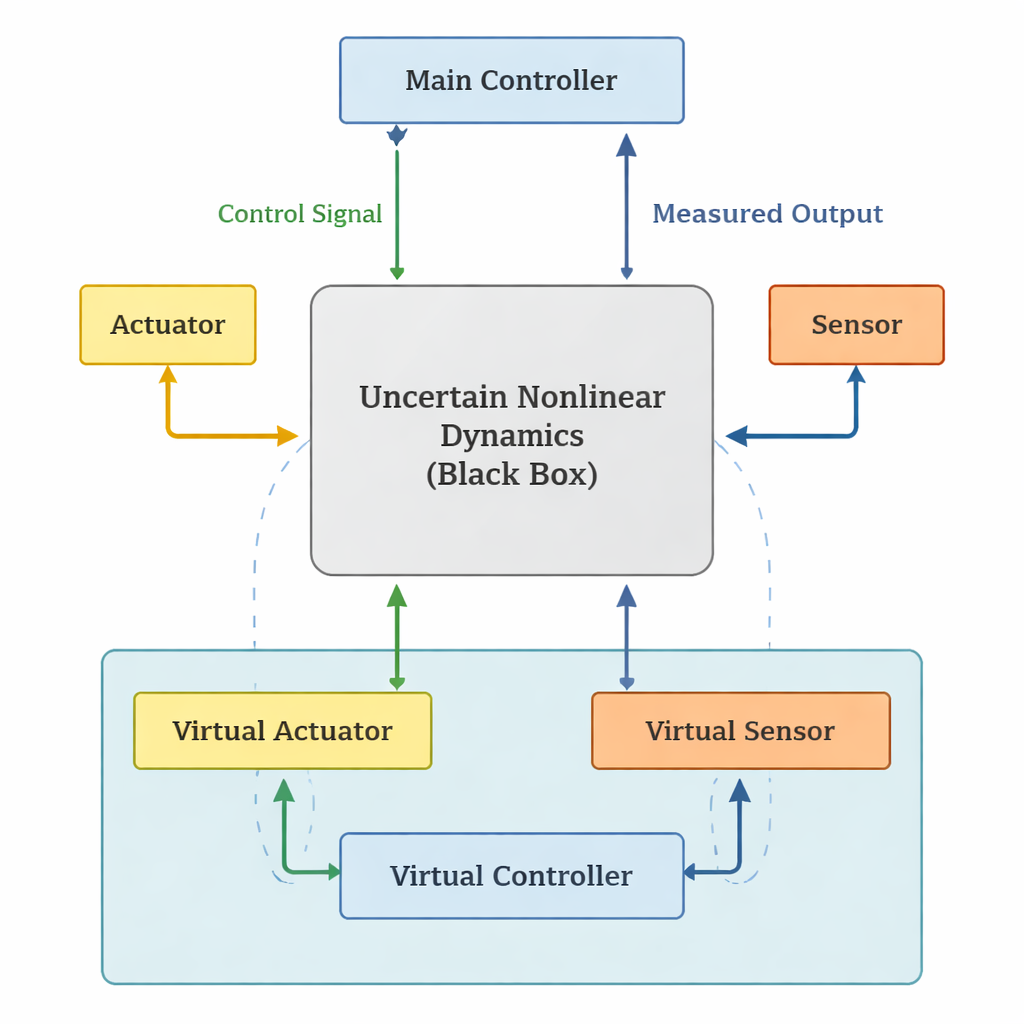
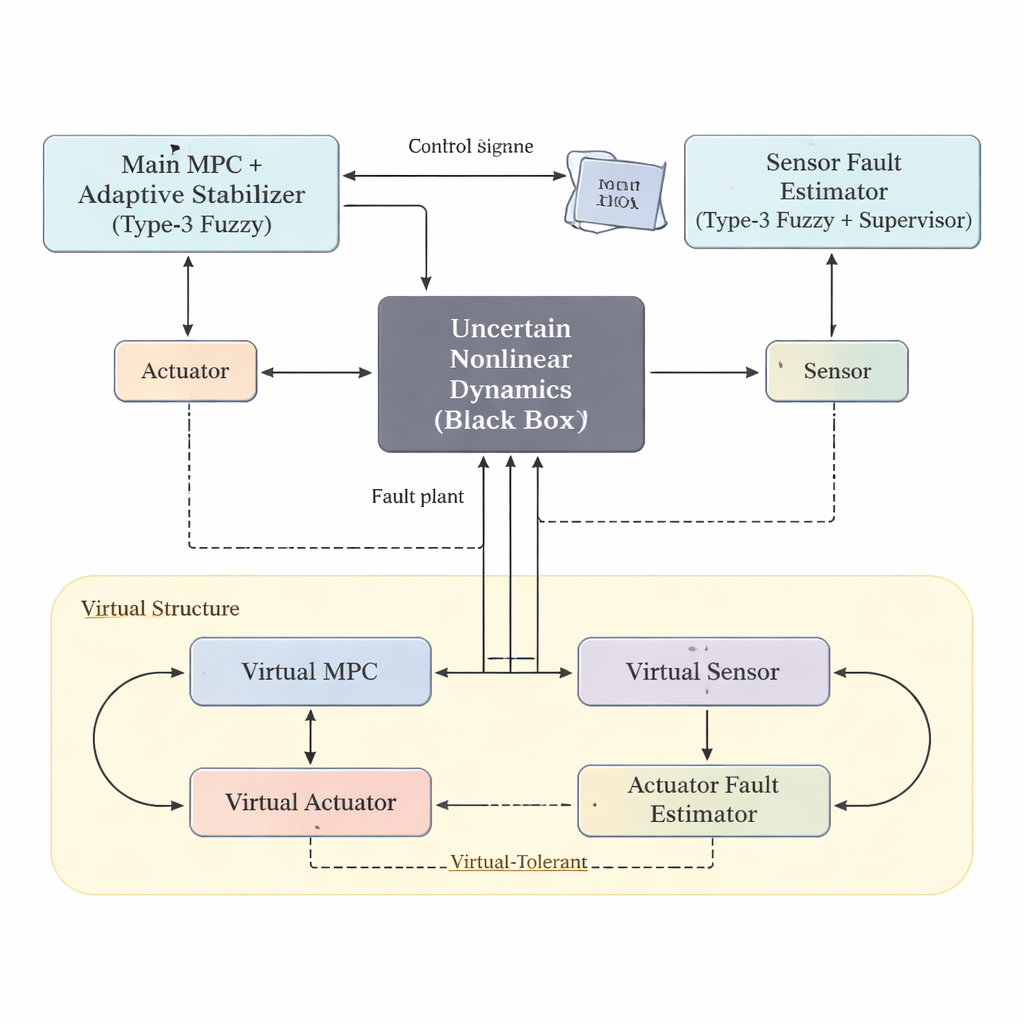
تنظر الإطار المقترح إلى المُنشأة باعتبارها صندوقًا أسود فقط: تراه من خلال إشارات التحكم المرسلة إليها والمخرجات المقاسة بواسطة المستشعرات. في جوهره يوجد نظام منطق ضبابي من النوع 3، وهو شكل متقدم من النمذجة الضبابية مصمم للتعامل مع عدم اليقين الشديد وضوضاء القياس. يتعلم هذا النظام الضبابي وصفًا مضغوطًا للمدخل-المخرج للديناميكيات المجهولة عبر الإنترنت، بينما يستخدم متحكم تنبؤي نموذجي (MPC) هذا النموذج المتعلم لتخطيط حركات التحكم المستقبلية على أفق قصير. تعمل وحدة استقرار تكيفية بالتوازي، مما يضمن أنه حتى لو كان النموذج غير كامل أو تحركت المعاملات، فإن التغذية الراجعة المجمعة تبقي أخطاء التتبُّع محدودة وفي نهاية المطاف تُدفع نحو الصفر.
مراقبة المراقبين: اكتشاف أخطاء المستشعر والمشغل
يقسم الإطار معالجة الأخطاء إلى جزئين منسقين. أولًا، تستخدم وحدة أخطاء المستشعر مُقدّرين ضبابيين إضافيين من النوع 3 جنبًا إلى جنب مع كتلة إشرافية لاستنتاج مدى انحراف قياس المستشعر عن قيمته المستقرة المتوقعة. من هذا ينتج إشارة تصحيحية تُعدِّل القياس الخاطئ بحيث يستمر المتحكم الرئيسي في رؤية مخرج موثوق. ثانيًا، يبني الأسلوب بنية افتراضية تعكس النظام الحقيقي: تشمل مستشعرًا افتراضيًا، ومشغلًا افتراضيًا، ومحددًا ضبابيًا خاصًا بها، ومتحكمًا تنبؤيًا افتراضيًا. لأن الحلقة الافتراضية لا تعاني تدهور المشغل الحقيقي، تكشف الاختلافات بين المسارين الافتراضي والواقعي مقدار فشل المشغل الحقيقي. تُحوَّل هذه الفجوة عبر صيغة بسيطة إلى تقدير لمستوى الخطأ، ثم يُعوَّض عنه في إشارة التحكم الرئيسية.
إثبات الاستقرار والاختبار على روبوتات وخزانات كيميائية
لإظهار أن النهج ليس مجرد حدس بل راسخ رياضيًا، يبني المؤلفون دالة ليابونوف — نوع من مقاييس الطاقة — تتضمن أخطاء التتبع، وأخطاء النمذجة، ومعاملات الضبابية القابلة للتعديل. يستنتجون قوانين تحديث للحدود التكيفية بحيث تنخفض هذه الطاقة دائمًا، مما يظهر أن الأخطاء تتقلص مع الزمن حتى مع وجود اضطرابات وأخطاء. تختبر المحاكاة بعد ذلك الطريقة على مثالين مختلفين تمامًا: ذراع روبوتية ذات وصلة واحدة وعملية معادلة الحموضة (pH) في خزان كيميائي. في كلتا الحالتين تُعامل الديناميكيات الحقيقية على أنها مجهولة تمامًا، وتتغير المعاملات، ويتم حقن أخطاء المستشعر والمشغل أثناء التشغيل. يحافظ المتحكم على تتبع دقيق، ويتعلم بسرعة حجم الأخطاء، ويحافظ على مقاييس المخاطر والخطأ منخفضة، متفوقًا على وحدات تحكم ضبابية أبسط وعلى مخططات مقاومة للأخطاء متقدمة أخرى من الأدبيات.
ماذا يعني هذا للأنظمة الحقيقية
لغير المتخصصين، الرسالة الأساسية هي أن هذه الطريقة تمنح الأنظمة المعقدة نوعًا من الوعي الذاتي المدمج. بدلاً من الاعتماد على نموذج مثالي أو إعادة ضبط يدوية من قبل المهندسين، يتعلم المتحكم باستمرار من البيانات التي يراها، ويلاحظ متى تبدأ المستشعرات أو المشغلات في الكذب أو الضعف، ويصحح أفعاله تلقائيًا للحفاظ على الأداء مستقرًا. وبما أنه يحتاج فقط إلى بيانات المدخلات والمخرجات، فإنه يمكن، من الناحية النظرية، تطبيقه على العديد من الآلات المختلفة دون إعادة تصميم كل شيء من الصفر. بينما تستند النتائج إلى محاكاة ولا تزال قضايا الأجهزة بحاجة إلى استكشاف، تشير الدراسة إلى روبوتات وعمليات صناعية وأنظمة مستقلة أكثر مرونة تبقى موثوقة حتى عندما تكون مكوناتها وبيئاتها بعيدة عن المثالية.
الاستشهاد: Hong, X., Zhakiyev, N., Yedilkhan, D. et al. A virtual-structure-based type-3 fuzzy system for predictive sensor and actuator fault detection, compensation, and control in nonlinear systems. Sci Rep 16, 7153 (2026). https://doi.org/10.1038/s41598-026-38456-0
الكلمات المفتاحية: التحكم المقاوم للأخطاء, المنطق الضبابي, التحكم التنبؤي النموذجي, أخطاء المستشعر والمشغل, الأنظمة غير الخطية