Clear Sky Science · ar
شبكة YOLOv11 محسّنة لاكتشاف الحطام البحري في بيئة تحت الماء
لماذا يهم رصد النفايات تحت الماء
في أعماق المحيط، تتكدس أكياس البلاستيك والزجاجات وخيوط الصيد وأنواع أخرى من الحطام بصمت. تضر هذه النفايات بالكائنات البحرية، وتسد المواطن الحسّاسة، ويمكن أن تعيق حتى الروبوتات تحت الماء التي يستخدمها العلماء لدراسة البحر وحمايته. تلخّص الورقة هنا نظام رؤية حاسوبية أذكى يساعد الكاميرات والروبوتات على العثور على النفايات تحت الماء ووضع تسميات لها تلقائياً في الزمن الحقيقي، حتى في المياه العكرة والمزدحمة.
تحدي الرؤية الواضحة تحت سطح البحر
على خلاف الصور النهارية الواضحة على اليابسة، تكون صور تحت الماء غالباً مظلمة، ضبابية وذا لون أزرق أو أخضر. يتلاشى الضوء بسرعة مع العمق، ويعكّر الرمل والبلانكتون المياه، وغالباً ما تكون قطع الحطام صغيرة أو مخفية جزئياً أو تشبه الصخور والنباتات. تواجه طرق معالجة الصور التقليدية صعوبات في هذه الظروف، وحتى كاشفات التعلم العميق الحديثة قد تفشل في رؤية الأجسام الصغيرة أو تخلط بين نسيج الخلفية والحطام. ومع ذلك، فإن الكشف الدقيق والسريع ضروري لرسم خرائط التلوث وتوجيه روبوتات التنظيف وتتبع كيف يتغير الحطام البحري مع الزمن.
الاستفادة من محرك بصري سريع
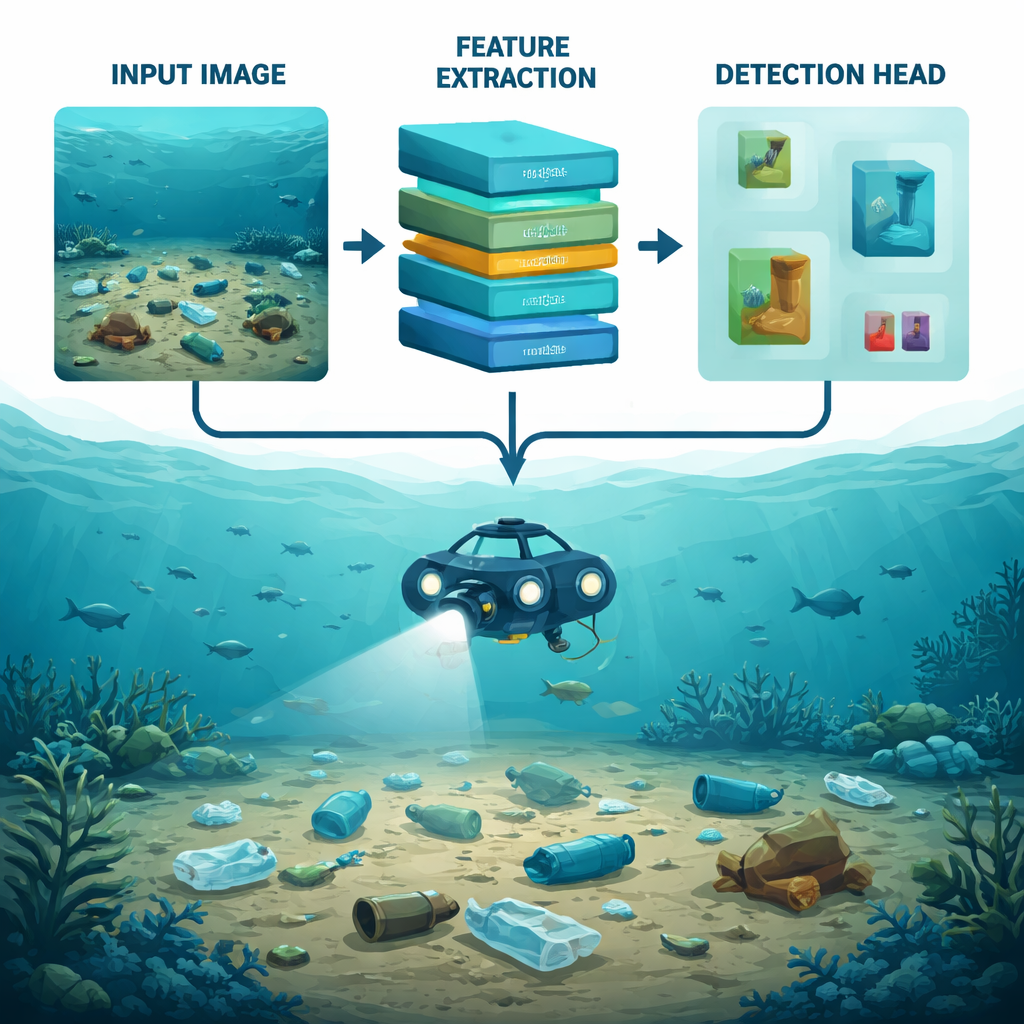
يعتمد المؤلفون على YOLOv11، عضو حديث في عائلة كاشفات الأجسام "تنظر مرة واحدة فقط". تحظى نماذج YOLO بشعبية لأنها تفحص الصورة مرة واحدة وتتنبأ بمواقع وأنواع عدة أجسام في الزمن الحقيقي. لكن تصميم YOLOv11 القياسي صُمم لمشاهد أكثر نمطية، مثل الشوارع أو صور داخلية، وليس لعالم تحت الماء شديد الضبابية بصرياً. لسد هذه الفجوة، أعاد الباحثون تصميم جزأين رئيسيين من الشبكة: كيفية استخراج الأنماط المرئية من الصورة في البداية، وكيفية اتخاذ القرار لاحقاً بشأن الأجزاء التي تمثل أجساماً مفيدة من الحطام وتلك التي هي مجرد ضوضاء بالخلفية.
أسلوب جديد لتمييز التفاصيل على مقاييس متعددة
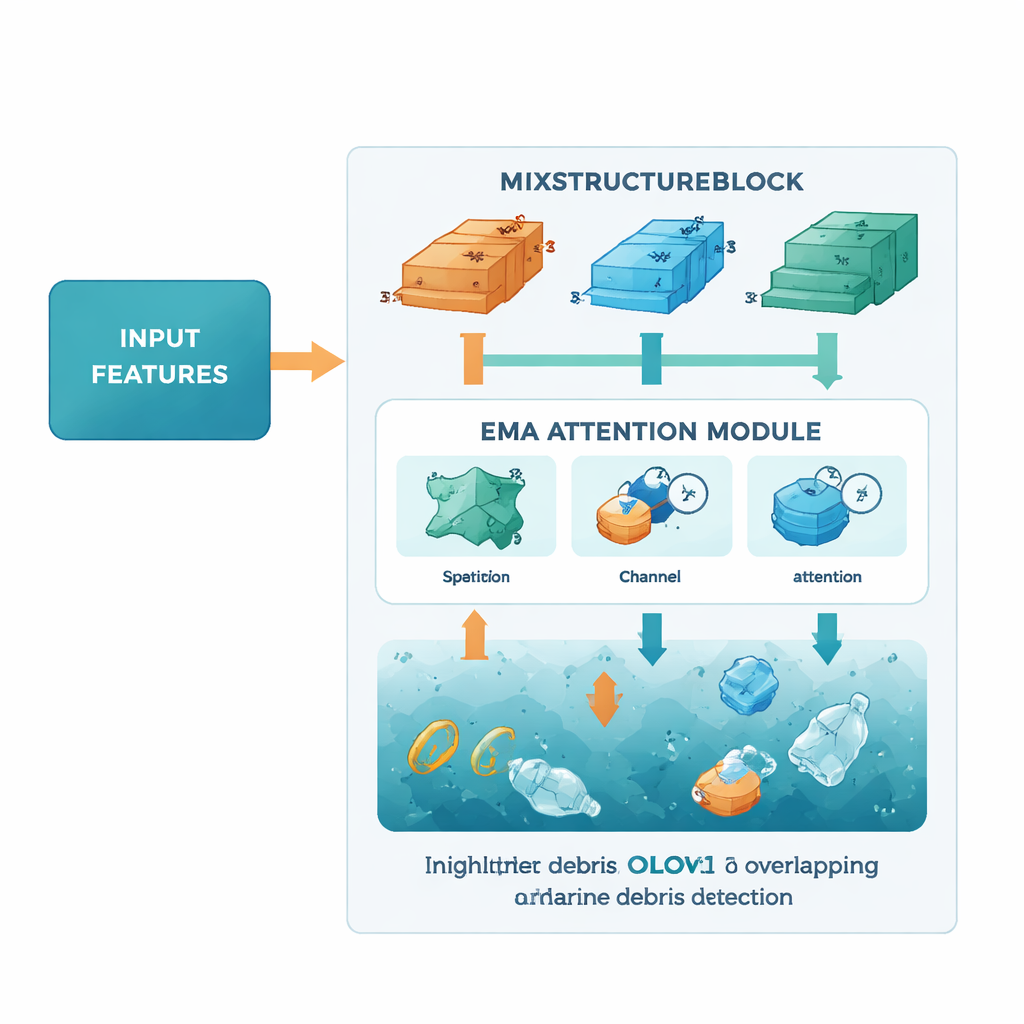
التحسين الأول هو وحدة تسمى MixStructureBlock، والتي تحل محل لبنة قياسية في العمق الخلفي لشبكة YOLOv11. بدلاً من استخدام نمط ثابت من المرشحات، تقوم MixStructureBlock بعدة فروع متوازية تنظر إلى المشهد بأحجام "نوافذ" وتباعد مختلف. يساعد هذا الشبكة على ملاحظة التفاصيل الدقيقة، مثل حافة غطاء زجاجة، والأشكال الأكبر، مثل كيس طافٍ. بالإضافة إلى ذلك، تتضمن الوحدة آليات انتباه بسيطة تتعلم أن تعطي أولوية للألوان والمواقع الإعلامية مع تقليل وزن بقع الخلفية غير المفيدة. النتيجة مجموعة ميزات أغنى وأنقى تجعل قطع الحطام الصغيرة والباهتة أسهل في الاكتشاف.
تعليم الشبكة أين تتركّز
الترقية الثانية هي وحدة الانتباه متعدد المقاييس الفعّالة (EMA)، المضافة لاحقاً في الشبكة حيث تُجرى عمليات الكشف. تنظر EMA إلى خرائط السمات عبر المكان والقنوات معاً، وتطرح عملياً سؤالين في آن واحد: "أين في الصورة يحدث شيء مهم؟" و"أي أنواع الأنماط هي الأكثر صلة الآن؟" عن طريق تجميع المعلومات على مقاييس متعددة واستخدام عمليات رياضية خفيفة الوزن، تُحسّن EMA تركيز الشبكة على مناطق الحطام المحتملة—مثل الأجسام المتداخلة أو العناصر الخافتة البعيدة عن الكاميرا—مع الحفاظ على نموذج مضغوط وسريع بما يكفي للاستخدام في الزمن الحقيقي على أجهزة مضمنة.
اختبار النظام
لتقييم تصميمهم، درّبت الفريق النموذج وقيّموه على TrashCan، مجموعة عامة كبيرة من صور أعماق البحار جُمعت في اليابان. تصنّف نسخة من مجموعة البيانات الحطام حسب نوع الشيء المحدد (مثل كوب، كيس أو أنبوب معدني)، بينما تجمع نسخة أخرى العناصر حسب المادة (مثل بلاستيك أو نسيج). على كلتا النسختين، يتفوق النموذج المحسّن على عدة خطوط أساس قوية، بما في ذلك YOLOv11 الأصلي، وأنظمة حطام بحرية سابقة ونماذج YOLO مخصّصة للمياه. فهو لا يكتشف المزيد من الحطام بشكل صحيح، خصوصاً العناصر الصغيرة والمتكدسة، فحسب، بل يفعل ذلك أيضاً بحجم نموذج صغير ملحوظ يقارب 5 ميغابايت، وهو مناسب للمركبات تحت الماء ذات القدرة المحدودة.
ماذا يعني هذا لمحيطات أنظف
بمصطلحات بسيطة، تُظهر الدراسة أن إعادة التفكير بعناية في كيفية "رؤية" الذكاء الاصطناعي للصور تحت الماء يمكن أن تُحدث فرقاً واقعياً في العثور على النفايات تحت الأمواج. من خلال الجمع بين استخراج الأنماط متعدد المقاييس والانتباه الذكي للمناطق المهمة، يكتشف النظام المقترح مزيداً من الحطام مع البقاء فعّالاً بما يكفي للاستخدام في الزمن الحقيقي. عند نشره على أنظمة الكاميرا والروبوتات تحت الماء، يمكن أن تساعد هذه التقنية العلماء والوكالات البيئية في رسم خرائط بؤر التلوث، وتوجيه جهود التنظيف، ومراقبة ما إذا كانت السياسات للحد من النفايات البحرية تجدي—مما يقربنا خطوة نحو محيطات أكثر صحة.
الاستشهاد: Yuanwei, J., Yijiang, D., Xuemei, W. et al. An improved YOLOv11 network for marine debris detection in underwater environment. Sci Rep 16, 7074 (2026). https://doi.org/10.1038/s41598-026-38305-0
الكلمات المفتاحية: اكتشاف الحطام البحري, الروبوتات المائية, كشف الأجسام, التعلم العميق, تلوث المحيط