Clear Sky Science · ar
بحث في طريقة تحديد الموضع في فرز الطرود في اللوجستيات المختلطة
لماذا يهم فرز الطرود بذكاء أكبر
كل طلب عبر الإنترنت تقوم به يطلق رقصة خفية من الصناديق داخل مراكز لوجستية ضخمة. قبل أن تتجه الطرد بسرعة نحو باب منزلك، يجب العثور عليها والتقاطها وقياسها ومسحها وتوجيهها—غالبًا من كومة فوضوية من الطرود المختلفة. اليوم، يعتمد الكثير من عملية «تفكيك الفوضى» هذه على عاملين بشريين يقومون بمهام متكررة ومرهقة. يعرض هذا البحث طريقة جديدة قائمة على الرؤية تساعد الروبوتات على إيجاد نقطة الالتقاط لكل طرد ضمن خليط من الطرود بشكل موثوق، مما يقربنا خطوة نحو فرز طرود أسرع وأكثر أتمتة وبجهد بشري أقل.
من الكومات الفوضوية إلى بيانات ملائمة للروبوت
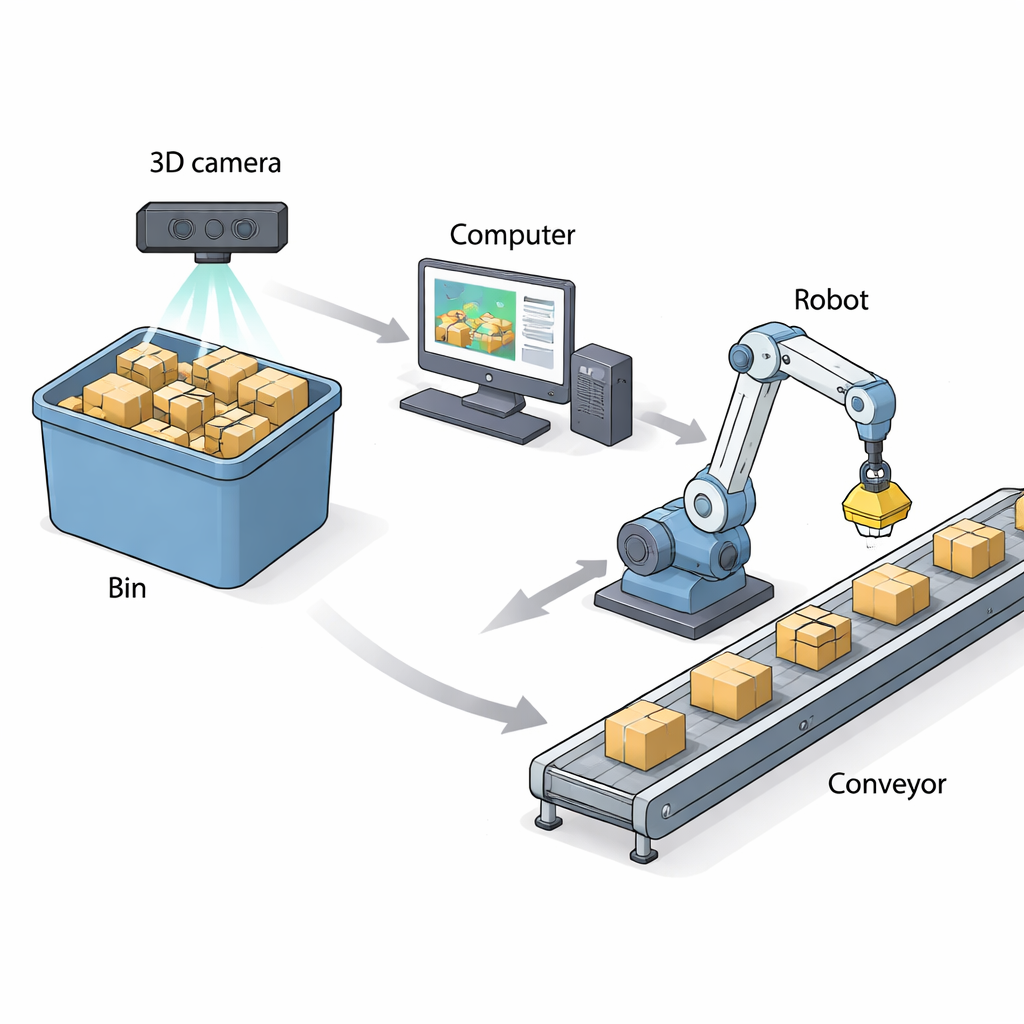
يركز الباحثون على ما يسميهــم طرود اللوجستيات «المختلطة»: صناديق يومية وأظرف مبطنة بالملاطف تُلقى في حاويات بدون ترتيب معين، وأحيانًا تُعصر أو تنحني نتيجة التكديس. لاستبدال العاملين البشر في هذا المحيط الفوضوي، يحتاج الروبوت أولاً إلى معرفة بالضبط أين يصل وماذا تكون زاوية مسكة الممسك على سطح الطرد المستهدف. يبني الفريق نظامًا حول كاميرا ثلاثية الأبعاد تلتقط صورة ملونة وخريطة عمق للطبقة العلوية من الطرود. تكشف شبكة تعرفٍ حديثة (مبنية على YOLOv8) عن الطرود الفردية في الصورة الملونة، بينما تكشف خريطة العمق عن شكلها الثلاثي الأبعاد. تسمح هذه المجموعة للحاسوب باختيار أفضل طرد يُمسك به تاليًا — واحد ليس محجوبًا كثيرًا وبعيدًا بما يكفي عن حواف الصندوق — قبل حساب نقطة مسك دقيقة.
إيجاد نقطة مسك مستقرة بثلاث نقاط وظل
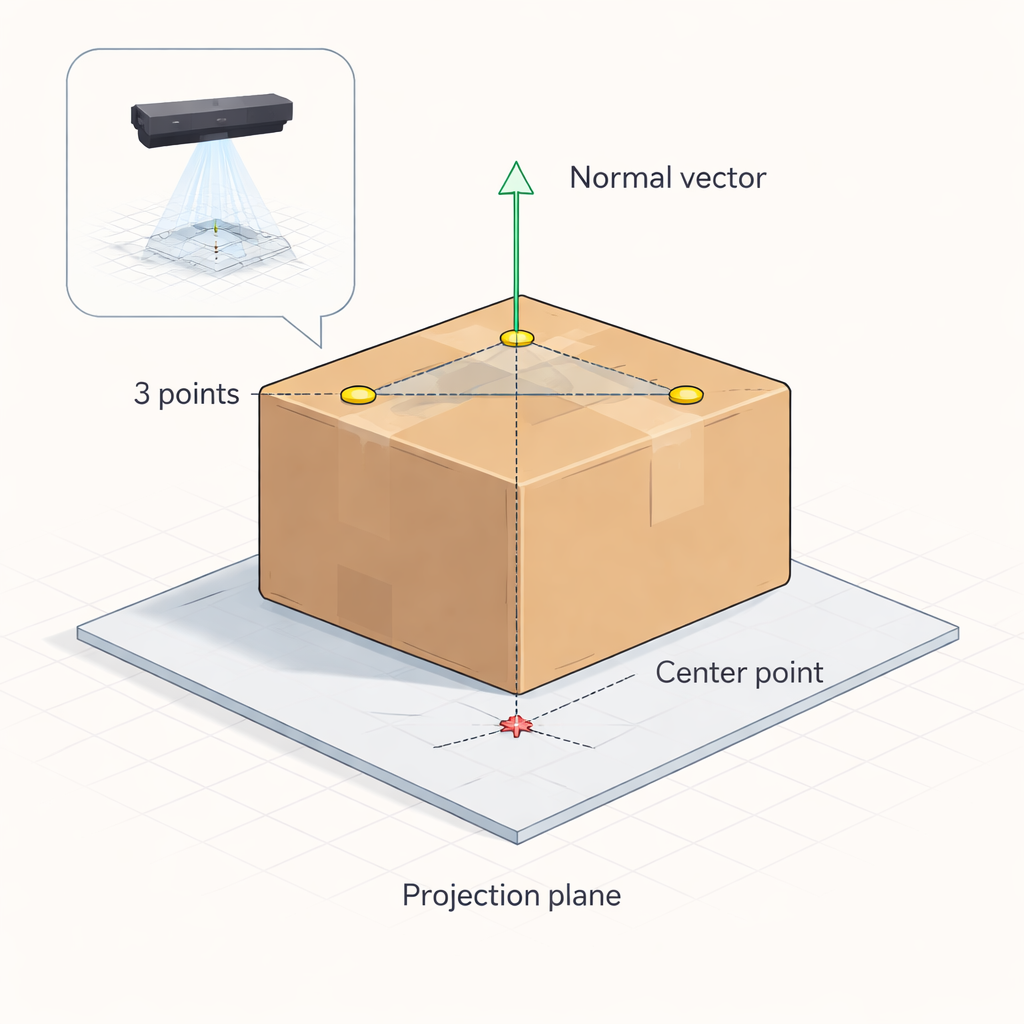
في قلب الطريقة حيلة هندسية يسميها المؤلفون خوارزمية التوسيط بالإسقاط-الاتجاه ثلاثي النقاط. بمجرد اختيار الطرد المستهدف، يختار النظام بشكل عشوائي ثلاث نقاط على سطحه العلوي من بيانات العمق. تعرف هذه النقاط الثلاث مستوىً، تمامًا كما تحدد ثلاث دبابيس على طاولة ميل تلك الطاولة. من هذا المستوى، تحسب الخوارزمية اتجاهًا «ناظمًا» — خطًا مستقيمًا يخرج بشكل عمودي على سطح الطرد. بالتوازي، يستخدم النظام زوايا الطرد الأربع العليا في الصورة لاستنتاج المركز الهندسي لمخططه المسقط، شبيهةً بإيجاد مركز ظل مستطيل. يجمع الدمج بين اتجاه المستوى وموقع هذا المركز لإنتاج موضع مسك ثلاثي الأبعاد دقيق واحتياج ميل سطح الطرد العلوي، ما يمكن أن يوجه كوب الشفط أو الممسك للروبوت.
التعامل مع الطرود المسطحة والمتورمة
الطرود الحقيقية ليست مكعبات مثالية: الأظرف المبطنة بالفقاعات تنهار، والحقائب اللينة تنتفخ، وصناديق الكرتون قد تنحرف تحت الحمل. ستفشل فرضية السطح المسطح البسيط في هذه الحالات. لمعالجة ذلك، يوسع المؤلفون رياضياتهم لتمييز بين ثلاث حالات: طرود شبه مسطحة، وأسُطح علوية محدبة (منتفخة)، وأسُطح مقعرة (متهدلة). بمقارنة أعلى وأدنى قيم العمق على سطح الطرد، يقرر النظام أولًا ما إذا كان الطرد مشوهًا بشكل ملحوظ. إذا كان كذلك، يحلل كيفية تقاطع السطح المشوه مع مستوى مرجعي متخيل ويناسب قطع ناقص تقريبي لتقاطع ذلك. من هذا، يحل النظام لإيجاد مستوى «أمثل» يمثل أفضل سطح مسك مستقر — حتى لو كان السطح العلوي الحقيقي متهدلًا أو منتفخًا — ثم يعيد إسقاط نقطة المسك الأساسية على ذلك المستوى.
اختبار الخوارزمية
للتحقق من فاعلية الرياضيات في التطبيق العملي، بنى الفريق منصة اختبار تحتوي على روبوت صناعي بستة محاور، وكاميرا ثلاثية الأبعاد، وجهاز مخصص ليزر-ومسبار. أولًا، وضعوا علامة على المركز الهندسي الحقيقي لسطح كل طرد اختبار واستخدموا شعاعين ليزريين لتحديد ذلك الموقع الفيزيائي في الفضاء. بعد ذلك، سمحوا لخوارزمية الرؤية بحساب تقديرها لمركز نفس الطرد وأمروا الروبوت بتحريك مسبار ثانٍ إلى تلك النقطة المحسوبة. بقياس الإزاحة الصغيرة بين طرفي المسبارين، تمكنوا من حساب خطأ التموقع. أظهرت الاختبارات مع نماذج صناديق خشبية صلبة ومواد تعبئة واقعية — كرتون مموج، أظرف مبطنة بالفقاعات وحقائب بلاستيكية، بأحجام تصل إلى 250×250 مم — حدًا أقصى لخطأ التموقع يقارب 1.7 مليمترًا وأخطاء متوسطة قريبة من 1 مليمتر لكل محور. استغرق الحساب الكامل لكل طرد نحو 17.5 ميلي ثانية، وهي سرعة كافية لخطوط فرز عالية الإنتاجية.
ماذا يعني هذا لمستودعات المستقبل
بعبارات بسيطة، يوضح البحث أن روبوتًا مزودًا بكاميرا ثلاثية الأبعاد وهذه الخوارزمية الثلاثية النقاط المعتمدة على الإسقاط يمكنه أن يحدد باستمرار أين وكيف يلتقط الطرود من حاوية فوضوية بدقة على مستوى المليمترات. بينما تقل الدقة بعض الشيء مع التشوهات الشديدة في الطرود اللينة جدًا، تظل الطريقة متينة بما يكفي لظروف المستودعات الواقعية. مع استمرار ارتفاع حجم الطرود واستمرار نقص العمالة، يمكن لمثل هذه الخوارزميات تمكين عمل أكثر أمانًا وأقل رتابة من خلال نقل أعباء الفرز الأثقل والأكثر تكرارًا من البشر إلى الآلات—مع المساهمة في إبقاء عالم التجارة الإلكترونية المتنامي يعمل بسلاسة.
الاستشهاد: Han, Y., Zhang, F., He, A. et al. Research on positioning method in parcel sorting in disordered logistics. Sci Rep 16, 7524 (2026). https://doi.org/10.1038/s41598-026-38092-8
الكلمات المفتاحية: رؤية ثلاثية الأبعاد, فرز الطرود, انتقاء روبوتي, أتمتة اللوجستيات, تحديد موضع الأجسام