Clear Sky Science · ar
دمج Swin-T المبسط مع EFS-Net المعدّل لتقسيم خطوط الأنابيب تحت الماء بتوجيه انتباه في بيئات بحرية معقدة
لماذا يهم مراقبة قاع البحر
مخفية تحت الأمواج، تنقل شبكات واسعة من الأنابيب النفط والغاز وكابلات الطاقة التي تعتمد عليها المجتمعات الحديثة. إذا تشققت هذه الأنابيب تحت الماء أو تآكلت أو تحركت، فقد يؤدي ذلك إلى تعطيلات مكلفة وتلوث شديد. اليوم، يتم إجراء جزء كبير من أعمال التفتيش بواسطة مشغلين بشريين يراقبون ساعات من الفيديو العكر القادم من روبوتات تحت الماء. يقدم هذا البحث نظام ذكاء اصطناعي جديد يمكنه الاستخراج الآلي لخطوط الأنابيب من صور بحرية صعبة، حتى عندما تكون خافتة أو مغطاة بـ "ثلج البحر" أو مدفونة جزئياً في الرمال. هذه الخطوة نحو تفتيش مؤتمت وموثوق قد تجعل طاقة وبنية تحتية البحر المفتوح أكثر أماناً وأقل كلفة للصيانة.
الرؤية الواضحة في عالم عكر
صور تحت الماء صعبة التفسير للحواسيب. يتلاشى الضوء بسرعة مع العمق، وتميل الألوان نحو الأخضر والأزرق، والجسيمات العائمة تخلق ضباباً ونقاطاً تشبه الثلج. تقنيات الصور التقليدية، التي تعتمد على الحواف الحادة والتباين النظيف، تفشل عادة عندما تغطي الرمال الأنبوب أو تحجبه النباتات أو يطمسه الضباب. حسن التعلم العميق الحال، وهناك عدة شبكات عصبية شائعة يمكنها بالفعل رصد الأنابيب في مجموعات بيانات محددة. ومع ذلك، هذه الأنظمة تتخصص عادة في نوع واحد من ظروف الماء أو إعدادات الكاميرا. عندما تواجه بيئة جديدة — ماء أو إضاءة أو خلفية مختلفة — ينخفض دقتها بشدة. التحدي المركزي هو بناء نموذج دقيق وقابل للتكيف وفي الوقت نفسه فعال بما يكفي للعمل في أنظمة التفتيش الواقعية.
نهجان في عقلين لمعالجة الصور تحت الماء
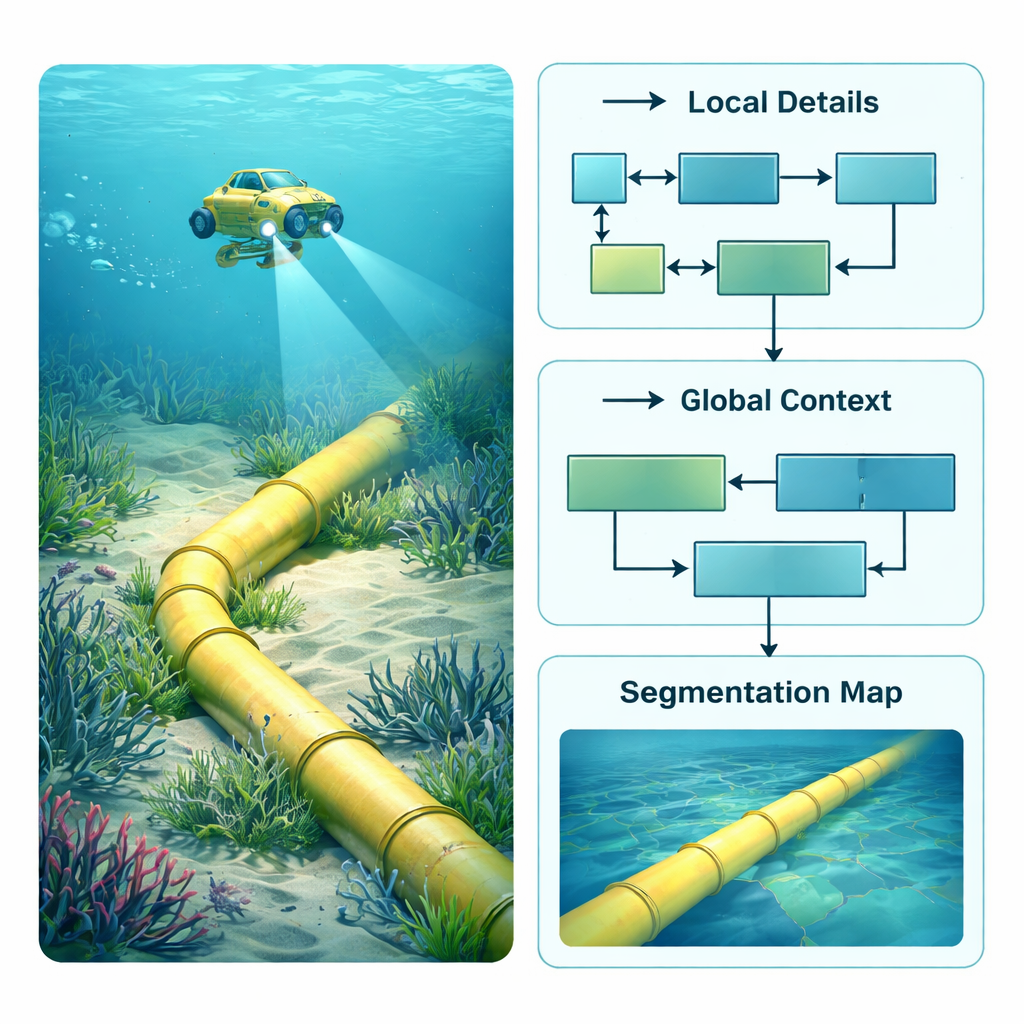
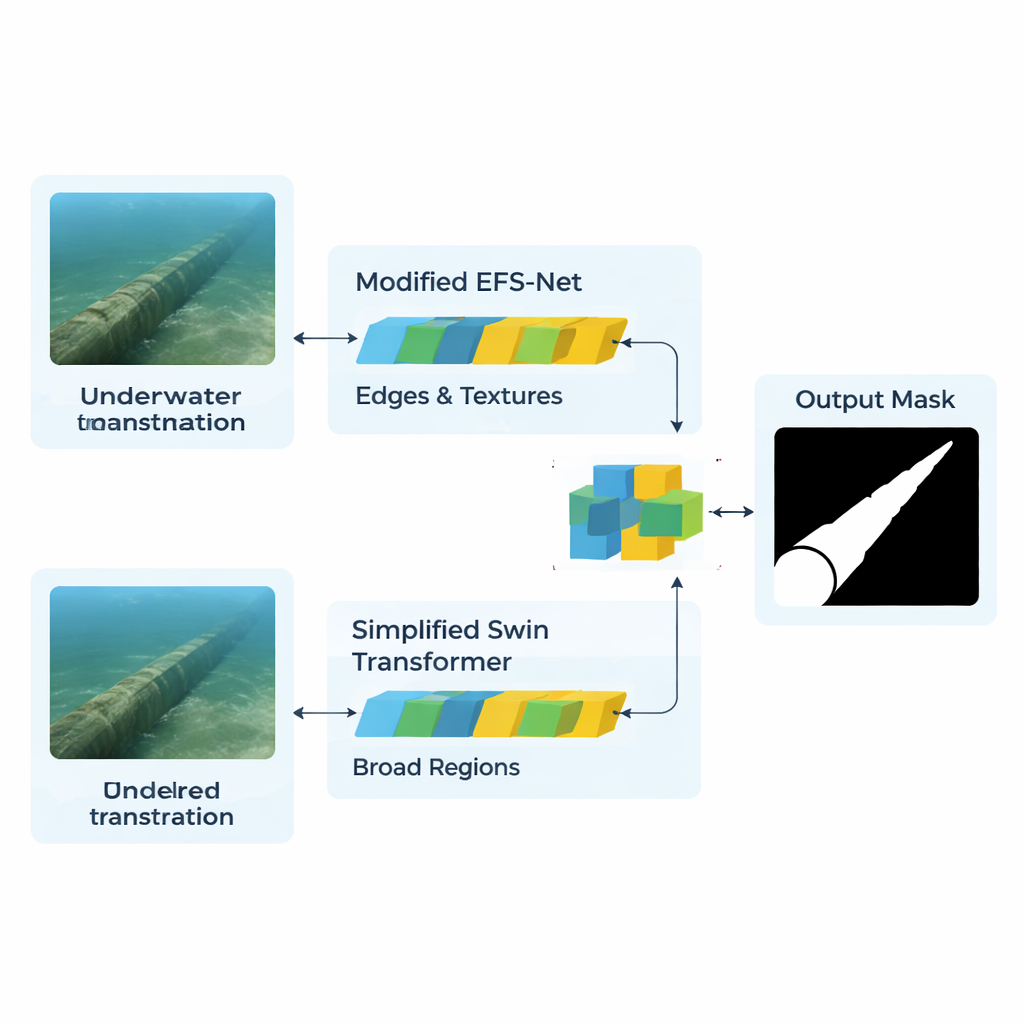
يعالج المؤلفون هذا ببناء بنية ذكاء اصطناعي هجينة تجمع بين «طريقتين للرؤية» مختلفتين للغاية. أحد الفروع، المستند إلى نسخة مبسطة من Swin Transformer، يعمل كراصد واسع النطاق. يمسح الإطار بأكمله لفهم الأنماط الكلية، مثل مسار الأنبوب عبر قاع البحر. الفرع الثاني، المستوحى من نموذج يسمى EFS-Net والمدعوم بعمود فقري EfficientNet، يتصرف كمكبر. يركز على التفاصيل الدقيقة — الحواف والملمس والهياكل الرفيعة التي تكشف أين يبدأ الأنبوب وأين تنتهي الرمال أو النباتات. يعالج كلا الفرعين نفس الصور المعاد تحجيمها ويحولانها إلى خرائط ميزات داخلية تصف ما قد تكونه الهياكل المهمة في كل منطقة من الصورة.
السماح للاهتمام بتحديد ما هو مهم
جمع مخرجات هذين الفرعين ببساطة سيخلق تشابكاً من المعلومات المتكررة. بدلاً من ذلك، يستخدم النموذج آلية «الانتباه» ليقرر، بكسلًا بكسل، أي التفاصيل تستحق التركيز. وحدة انتباه متقاطع بثلاث رؤوس تقارن ميزات فرع التفاصيل مع ميزات فرع السياق. في الجوهر، يطرح فرع التفاصيل أسئلة مستهدفة — «هل هذه الحافة جزء من أنبوب؟» — بينما يوفر فرع السياق دلائل عامة — «هل يبدو أن هذا الخط في هذا الموضع والاتجاه منطقياً كجزء من أنبوب؟» خطوة تحسين إضافية، تسمى CBAM، تعزز الإشارة من المناطق المحتملة لوجود أنبوب وتقلل ضوضاء الخلفية مثل الصخور والطحالب أو الجسيمات المعلقة. ثم يعيد شبكة فك التشفير تدريجياً بناء قناع بالحجم الكامل يعلّم كل بكسل إن كان أنبوباً أم لا.
اختبار النظام
لتقييم ما إذا كان هذا التصميم يعمل عملياً، جمع الباحثون مجموعة بيانات كبيرة ومتطلبة اسمها HOMOMO. تحتوي على أكثر من 120,000 صورة ملونة لخطوط أنابيب بحرية حقيقية مأخوذة على طول 1.2 كيلومتر من الأنبوب في ظروف متنوعة وغالباً معادية: إضاءة منخفضة، ضباب بحري، "ثلوج" عائمة، انساب الرمال ونمو نباتي كثيف. دربوا نموذجهم على جزء من هذه المجموعة ثم قارنوه مع أنظمة مستخدمة على نطاق واسع مثل UNet وDeepLab وSwinUNet وTransUNet وMask2Former وعدة إصدارات من كاشف الكائنات YOLO. على HOMOMO، قسمت نموذجهم الهجين بكسلات الأنبوب بدقة متوسطة للتقاطع على الاتحاد تبلغ حوالي 98%، أعلى بكثير من أفضل وسيلة منافسة. وبالمثل الأهمية، عندما اختبر دون إعادة تدريب على مصدرين مختلفين تماماً للصور، مجموعة Roboflow الاصطناعية وفيديوهات واقعية من يوتيوب، استمر النموذج في الأداء القوي، مما يدل على قدرته على التعامل مع كاميرات وظروف مياه جديدة.
ماذا يعني هذا للمحيط الحقيقي
لغير المتخصصين، الخلاصة هي أن هذا النظام الذكي يمكنه تحديد محيط خطوط الأنابيب تحت الماء بشكل موثوق في إطارات فيديو صاخبة وغير متسقة لدرجة أن الطرق التقليدية تفشل فيها. بمزج رؤية شاملة للمشهد مع عين حادة للحواف والملمس، وباستخدام الانتباه لدمج هذين المنظورين، يحقق النموذج دقة عالية دون الحاجة لقوة حوسبة هائلة. عملياً، يمكن لأداة كهذه أن تساعد الروبوتات المستقلة على مراقبة امتدادات طويلة من البنية التحتية تحت البحر باستمرار، مع الإشارة إلى أضرار محتملة أو دفن ليفحصها البشر. رغم أنه لا يزال يواجه صعوبة مع الأنابيب الرفيعة للغاية أو المخفية تماماً، فإن هذا النهج يمثل خطوة مهمة نحو تفتيش أكثر أماناً وتلقائية لتمديدات الأنابيب المخفية التي تدعم شبكات الطاقة والاتصالات الحديثة.
الاستشهاد: Hosseini, N., Mohanna, F. & Moghimi, M.K. Integrating simplified Swin-T with modified EFS-Net for attention-guided underwater pipelines segmentation in complex underwater environments. Sci Rep 16, 6987 (2026). https://doi.org/10.1038/s41598-026-38081-x
الكلمات المفتاحية: خطوط أنابيب تحت الماء, تقسيم الصور, التعلم العميق, تفتيش بحري, شبكات المحولات