Clear Sky Science · ar
التحليل القابل لإعادة التشكيل وتحسين فضاء العمل لروبوت موازٍ معيَّن بكوابل ومودولي
روبوتات تسافر على مسارات غير مرئية
تخيل روبوتًا ينزلق بكاميرا ثقيلة عبر ملعب، أو يرفع مواد بناء فوق موقع تشييد، أو يوجه جهازًا للعلاج حول مريض، وكل ذلك معلقًا بواسطة كابلات بدلاً من التحرك على ذراعين صلبين. تقدم هذه الورقة نوعًا جديدًا من الروبوتات المعلقة بالكابلات يمكن إعادة تشكيل بنيتها حسب الطلب، مما يسمح لماكينة واحدة بالتكيف مع مهام مختلفة مع استغلال أقصى حركة مفيدة ضمن مساحة عملها.
بناء روبوت من قطع قابلة للتبديل
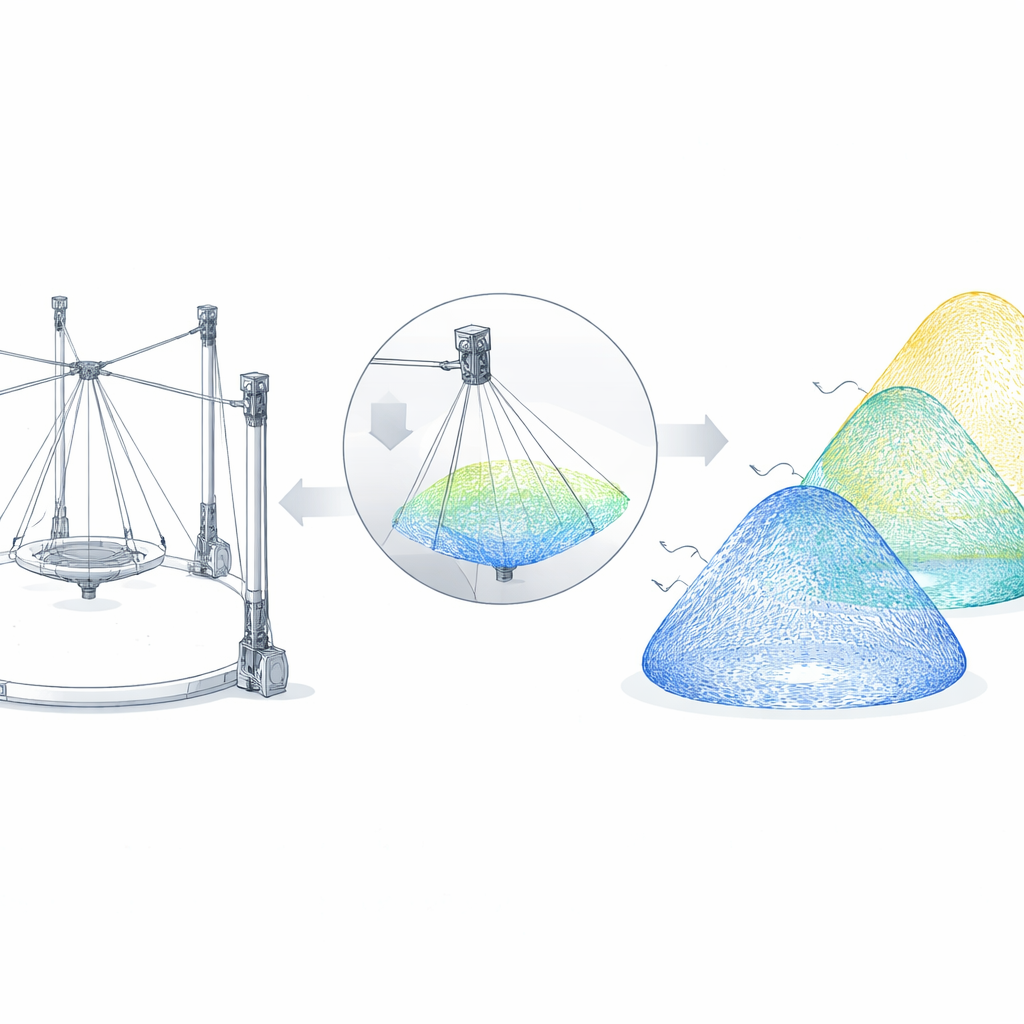
في صلب الدراسة يوجد روبوت موازي معيَّن بكوابل ومودولي (MCSPR). بدلًا من الأذرع المعدنية الثابتة، يستخدم ما يصل إلى ستة «فروع» متطابقة، كل واحدة عبارة عن برج يحتوي محركات وبكرات وكابل يتصل بمنصة مركزية متحركة تسمى المنفِّذ النهائي. توضع هذه الفروع حول مسار دائري ويمكن إضافتها أو إزالتها أو تدويرها أو رفعها وخفضها. بإعادة ترتيبها، يمكن لنفس الأجهزة أن تتصرف كعدة روبوتات مختلفة: بفرعين يتحرك المنفِّذ على مستوى، وبثلاثة أو أربعة يتحرك بحرية في الفراغ، وبخمسة أو ستة يمكنه أيضًا الإمالة والدوران في اتجاهات متعددة.

تخطيط هيكل آلة متغيرة الشكل
تصميم نظام مرن كهذا ليس مجرد مسألة ربط قطع معًا. يستخدم المؤلفون نهج «التوليف الهيكلي» المنهجي، معاملين كل كابل وبكرة ومفصل ككتلة بناء أساسية في شبكة. من خلال مخططات شبيهة بالرسوم البيانية، يرسمون كيف تتصل هذه العناصر بحيث تنتهي المنصة بالحريات الحركية المطلوبة — مثل الانزلاق على ثلاثة محاور أو الدوران حولها. يعمل هذا فهرس الوحدات والروابط كصندوق أدوات تصميم: اعتمادًا على الحركة التي تتطلبها المهمة، يمكن للمصمم اختيار عدد الفروع ومواقعها على المسار الدائري، مطمئنًا إلى أن البنية الناتجة ستتصرف كما هو مقصود.
معرفة كيف سيتحرك المنفِّذ
بما أن المنصة معلقة بكابلات لا تستطيع سوى الشد ولا تدفع، فالتنبؤ بحركتها أعقد من الروبوتات التقليدية. يطور الفريق وصفًا رياضيًا موحدًا يعمل لجميع التراكيب الخمسة الرئيسية للـ MCSPR. بالنظر إلى موضع ووجهة المنصة المرغوبة، يحسبون بدقة طول كل كابل ومدى سرعة تغير طوله. ثم يبنون نموذجًا فعليًا ويؤمرونه بتتبُّع مسار حلزوني ناعم في الفضاء. تقوم أجهزة الاستشعار على طول الكابلات بتسجيل الحركات الفعلية، والتي تطابق التنبؤات عن كثب. هذا يؤكد أن النموذج يمكنه توجيه الروبوت بثقة حتى مع إعادة تشكيل هندسته.
معرفة المواضع التي يمكن للروبوت أن يثبت فيها بأمان
لا يقل أهمية فهم الأماكن التي يمكن للمنصة المعلقة أن تبقى متوازنة. إذا ارتخى أي كابل، يفقد النظام السيطرة. يركز المؤلفون على ما يسمونه فضاء عمل التوازن الساكن: المنطقة في الفضاء حيث يمكن أن تبقى جميع الكابلات تحت شد موجب بينما تؤثر الجاذبية فقط على المنصة. باستخدام نهج مونت كارلو، يأخذون عينات عشوائية من أوضاع ومنحنيات المنصة المحتملة ويفحصون، لكل واحدة منها، ما إذا كانت توترات الكابلات اللازمة للحفاظ على تلك الوضعية تقع ضمن الحدود الآمنة. تشكل العينات المقبولة سحابة ثلاثية الأبعاد تحدد حجم العمل المتاح للروبوت.
زيادة مدى الروبوت بالضبط الذكي
بما أن ارتفاعات وزوايا فروع الـ MCSPR قابلة للتغيير، ويمكن للمنصة حمل أحمال ذات كتل وزوايا إمالة مختلفة، فإن حجم وشكل هذه المنطقة الآمنة ليست ثابتة. يغيّر الباحثون هذه العوامل بشكل منهجي في إعداد بستة فروع. يظهرون أن حملًا أثقل يقلص بشدة المنطقة التي يمكن للروبوت أن يثبت فيها، بينما يمكن للاختيارات الذكية لارتفاعات الفروع وتباعدها الزاوي توسيعها. ثم يطرحون مسألة تحسين: ضبط الحمولة، وارتفاعات الفروع، وزوايا الفروع ونطاق إمالة المنصة لزيادة حجم فضاء العمل الآمن. عند تشغيل هذا البحث في البرامج، يجدون تكوينًا تكون فيه المساحة المتاحة للمناورة والتوازن أكبر بعدة مرات مقارنة بتخطيط بسيط.
لماذا يهم هذا في الأعمال الحقيقية
لغير المتخصص، الرسالة الأساسية هي أن هذا الروبوت يمكن إعادة تشكيله تقريبًا مثل مجموعة بناء، ومع ذلك يمكن تحليله وضبطه بدقة. من خلال الجمع بين الأجهزة المعيارية والتخطيط الرياضي الدقيق والبحث الحاسوبي، يحول المؤلفون آلة معلقة واحدة بالكابلات إلى منصة متعددة الاستخدامات يمكن تكييفها لعدة مهام — من التصنيع الدقيق إلى إعادة التأهيل — مع استثمار أقصى قدر من مساحة التشغيل والحفاظ على حمل آمن مدعوم.
الاستشهاد: Zhao, T., Dai, W., Zheng, F. et al. Reconfigurable analysis and workspace optimization of modular cable-suspended parallel robot. Sci Rep 16, 9210 (2026). https://doi.org/10.1038/s41598-026-37947-4
الكلمات المفتاحية: روبوتات الكابل, الروبوتات المعيارية, الآليات القابلة لإعادة التشكيل, فضاء عمل الروبوت, المُعالِجات الموازية