Clear Sky Science · ar
التخطيط الديناميكي للمسارات مع الوعي بالجودة لأذرع روبوتية بست درجات حرية باستخدام BiRRT والتحسين الميتاهيوريستيكي القائم على مسارات B-spline
روبوتات تتحرك بسلاسة وأمان
تشارك الروبوتات الصناعية اليوم مساحات عمل مزدحمة مع الأشخاص والأدوات وأنظمة النقل. في هذه المساحات الضيقة، لا يكفي أن يتحرك الذراع من النقطة أ إلى النقطة ب فحسب؛ بل يجب أن يفعل ذلك دون اصطدامات، وباستهلاك طاقة منخفض، ودون اهتزاز يعرّضه أو المعدات المجاورة للتلف. يصف هذا البحث طريقة عملية لتخطيط مثل هذه الحركات الدقيقة لذراع صناعي شائع ذو ستة مفاصل، بتحويل مسارات مكتشفة بشكل تقريبي عبر الحاسب إلى حركات ناعمة وواعية للطاقة يمكن تنفيذها بأمان على أجهزة المصنع الحقيقية.
لماذا التخطيط لوصول بسيط أصعب مما يتوقع
عندما يتحرك ذراع روبوت، يجب موازنة عدة عوامل في آن واحد. ينبغي أن يكون المسار قصيرًا حتى تُنجَز المهام بسرعة، ويجب أن يكون استهلاك الطاقة معتدلاً للحد من الحرارة والتآكل، ويجب أن تكون الحركة لطيفة بما يكفي حتى لا يحدث ارتجاج أو اهتزاز للذراع. الأساليب التقليدية ترسم منحنيات رياضية ناعمة (مثل السبلين) عبر عدد قليل من نقاط المسار المنتقاة يدويًا، وهذا ينجح في الفراغ المفتوح لكنه قد يصبح غير فعال أو حتى غير آمن في خلايا العمل المزدحمة. أما طرق العينة الأحدث، مثل أشجار الاستكشاف العشوائية السريعة (RRT)، فهي جيدة في الشق عبر حقول الحواجز المعقدة لكنها تميل لإنتاج مسارات ذات انحناءات حادة تجهد المحركات والتروس. يجادل المؤلفون بأن أياً من العائلتين ليس كافياً بمفرده؛ بدلًا من ذلك، يدمجانهما في إطار عمل من مرحلتين.
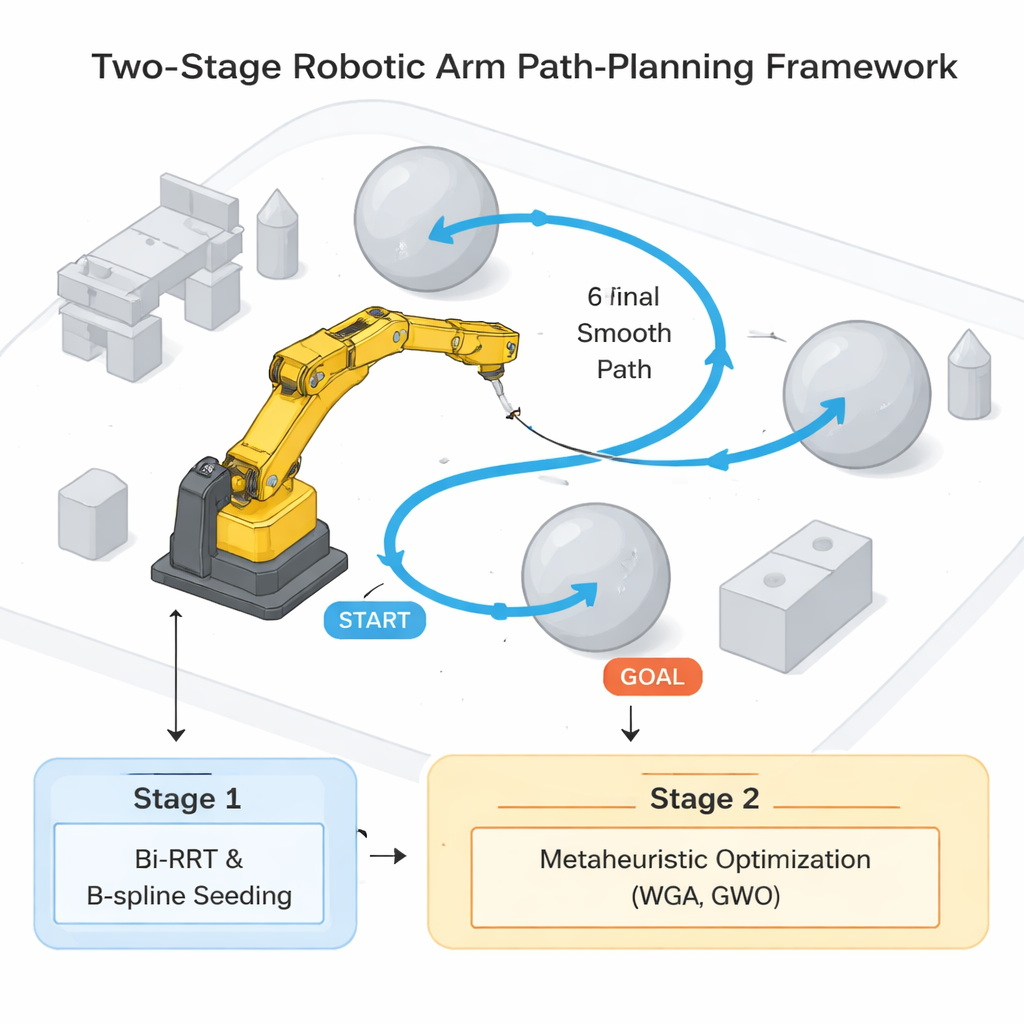
خارطة طريق من مرحلتين لحركة الروبوت
في المرحلة الأولى، يبني الفريق "مسار مرجعي" آمنًا في فضاء مفاصل الروبوت بدلاً من التركيز فقط على موضع اليد في الفضاء. يبدأون بمنحنى B-spline ناعم يربط موضع البداية بالهدف مع تجنّب العقبات الكروية مع هامش أمان. ثم يوجه هذا المنحنى مخطط Bi-RRT ثنائي الاتجاه الذي ينمّي شجرتين عشوائيتين—من البداية ومن الهدف—حتى تلتقيان في مسار خالٍ من الاصطدامات. على طول الطريق، تُفحَص كل حركة مؤقتة للذراع ككل مقابل أشكال مبسطة للعقبات. بمجرد العثور على مسار، تُقَلَّص الانحناءات الزائدة بواسطة "التقصير"، ويُعاد التعبير عن النتيجة كسبلاين مبرمَج زمنيًا يمكن للروبوت، من حيث المبدأ، اتباعه.
تعليم الروبوت كيف يتحرك بلطف أكبر
المرحلة الثانية تأخذ هذا المسار القابل للتنفيذ لكنه غير المثالي وتعدله لتحسين جودته. هنا يستخدم المؤلفون طريقتين منتحيتين مستلهمتين من الطبيعة: خوارزمية هجينة تجمع بين الحيتان والخوارزميات الجينية (WGA) وخوارزمية ذئب الرمادي (GWO). كلاهما يعملان على مجموعة محدودة من نقاط التحكم ومقابض التوقيت على السبلين الأصلي، لكن يُسمَح لهما فقط بتحريك هذه النقاط داخل ممرات أمنة محسوبة مسبقًا حول المسار. يُقيَّم كل مسار مرشح بمقياس مركب واحد يمزج ثلاثة مكونات: مدى تحرك يد الروبوت، وكمية الطاقة على مستوى المفصل (بناءً على خصائص كل محرك)، ومدى "الاهتزاز" في المفاصل—أي مدى سرعة تغير تسارعاتها عبر الزمن. من خلال اقتراح واختبار وتحسين المسارات المرشحة تكراريًا، تبحث هذه المحسّنات عن حركات لا تزال خالية من الاصطدامات لكنها أكثر نعومة وجاهزية للتنفيذ.
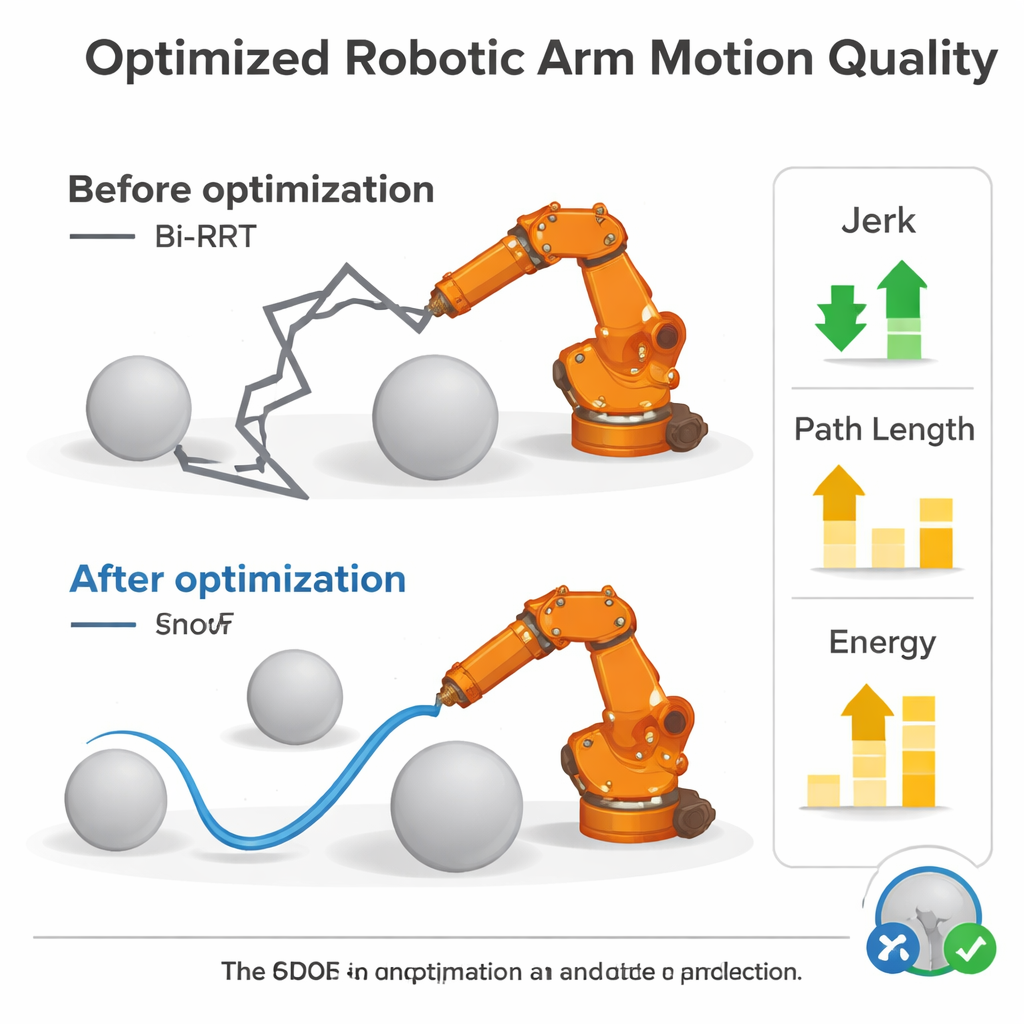
ما تكشفه المحاكيات
يختبر المؤلفون خط أنابيبهم على نموذج رقمي لذراع صناعي مستخدم على نطاق واسع، KUKA KR 4 R600، يتحرك عبر مشهد به ثلاث عقبات خلال حركة ثابتة مدتها ثانيتان. الحل القائم على السبلين وحده ناعم إلى حد معقول لكنه لا يستغل منهجياً كل المسارات الآمنة الممكنة. Bi-RRT مع التقصير يجد مسارًا بطول هندسي مماثل وحتى باستهلاك طاقة أقل، لكن مع عيب رئيسي: مؤشر الاهتزاز—وهو مؤشر على مدى حدة تغير تسارع المفاصل—أعلى بحوالي عشرة أضعاف، مما يشير إلى حركة من المحتمل أن تثير اهتزازات وتضغط الماكينة الحقيقية. بعد تطبيق WGA أو GWO، يقل الاهتزاز بنحو 94–96 بالمئة بالنسبة إلى مسار Bi-RRT الخام هذا. تأتي هذه السلسلة الدراماتيكية من التنعيم بتكلفة زيادات متواضعة فقط في مسافة السفر (حوالي 15–17 بالمئة) والطاقة (بنحو ضعف)، وهو تسوية يرى المؤلفون أنها تستحق للتطبيق على معدات حقيقية.
من النظرية إلى أرض المصنع
لغير المتخصص، الخلاصة الأساسية هي أن المؤلفين يقدمون وصفة ملموسة—وأدوات مبنية على MATLAB—لتحويل الفكرة الأولية والخشنة لحركة الروبوت إلى حركة مصقولة وصديقة للأجهزة. يضمن نهجهم أولًا وجود مسار عبر بيئة مزدحمة، ثم يعيد تشكيل ذلك المسار حتى يتحرك الذراع مع نقرات أقل مع الحفاظ على حدود المفاصل وخلو الحيزات. النتيجة النهائية هي مجموعة من الحركات التي يمكن لروبوت صناعي حقيقي تنفيذها بأمان وموثوقية أكبر، مما يمهد الطريق لتوسعات مستقبلية حيث يشارك الروبوت البشر فضاءات العمل ويتكيف في الوقت الحقيقي باستخدام كاميرات وحتى واجهات إشارات دماغية.
الاستشهاد: Elgohr, A.T., Rashad, M., El-Gendy, E.M. et al. Dynamic quality aware path planning for 6 DoF robotic arms using BiRRT and metaheuristic optimization based on B spline paths. Sci Rep 16, 7487 (2026). https://doi.org/10.1038/s41598-026-37676-8
الكلمات المفتاحية: تخطيط مسار الروبوت, ذراع روبوت صناعي, تجنب الاصطدام, نعومة الحركة, التحسين الميتاهيوريستيكي