Clear Sky Science · ar
مقياس تكوين آمن وتخطيط حركة لفرق هجينة من الطائرات بدون طيار والمركبات الأرضية في بيئات مزدحمة
روبوتات تتعاون في الجو وعلى الأرض
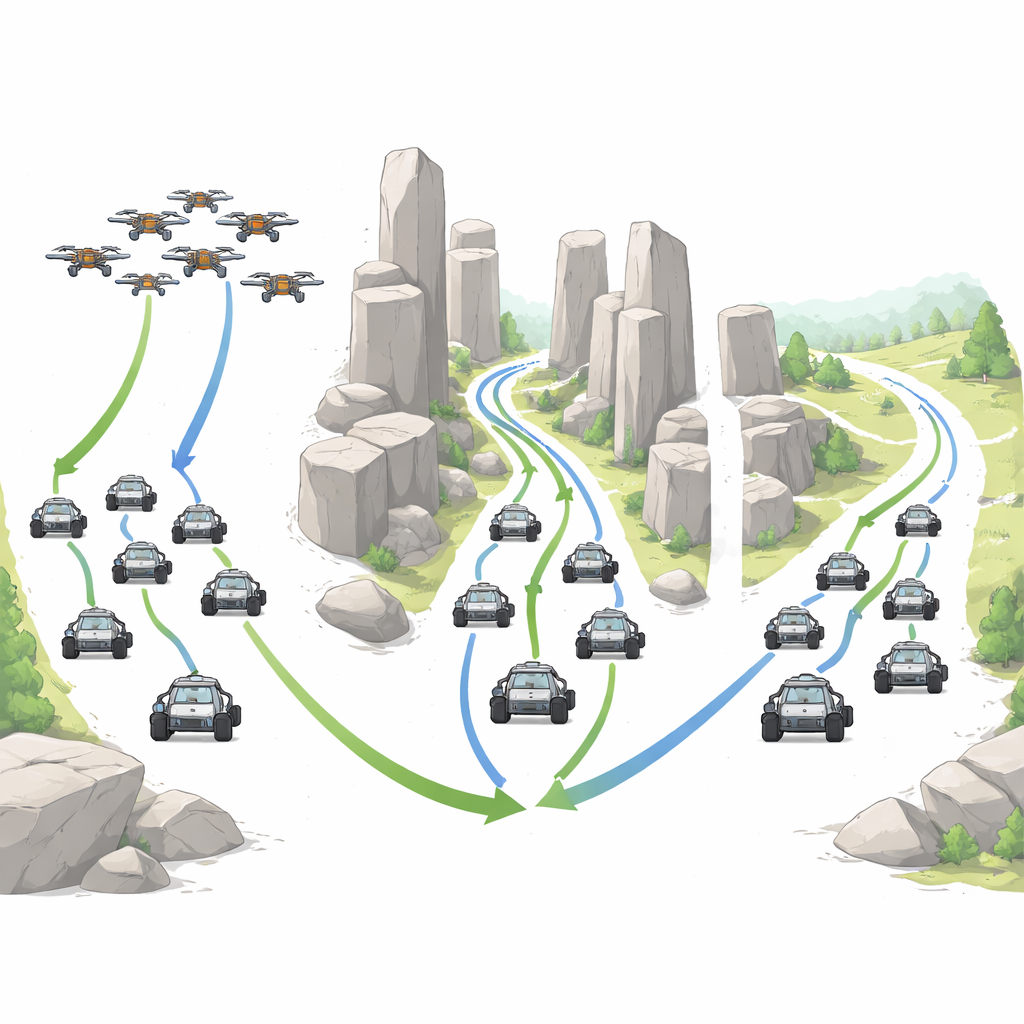
تخيّل سربًا من الطائرات الصغيرة يستكشف أعلاه منطقة كارثة بينما تتسلّل مركبات أرضية قوية عبر الأنقاض أدناه، جميعها تتحرك كفريق منسق واحد. تستعرض هذه الورقة كيفية الحفاظ على تماسك مجموعات الروبوتات المختلطة في مساحات ضيقة ومليئة بالعقبات دون اصطدامات أو إعادة تخطيط محمومة. يقترح المؤلفون طريقة جديدة لتمكين الروبوتات الجوية والبرية من مشاركة تشكيل ثابت، والمرور عبر فتحات ضيقة، والوصول بسرعة وأمان إلى الهدف.
لماذا من الصعب تنسيق فرق الروبوتات المختلطة
تتصرف الطائرات بدون طيار والمركبات المدولبة بشكل مختلف جذريًا. الطائرات تقفز في الفضاء ثلاثي الأبعاد وتتأثر بسهولة بالرياح، بينما يجب على المركبات الأرضية الالتزام بحدود الانعطاف ومواجهة التضاريس الوعرة. ومع ذلك، تستفيد العديد من المهام الحقيقية—من البحث والإنقاذ إلى فحص البنية التحتية—إذا تمكنت هذه الروبوتات من التحرك معًا كمجموعة ثلاثية الأبعاد واحدة. غالبًا ما تعامل الطرق الحالية الحفاظ على التشكيل وتجنّب العوائق كمشكلتين منفصلتين. عندما يصبح المحيط مزدحمًا، يميل التشكيل إلى التفكك ثم إعادة التجميع لاحقًا، مما يضيّع الوقت ويزيد من احتمال الاصطدامات.
طريقة جديدة للحفاظ على تماسك المجموعة
لمعالجة ذلك، يصمم المؤلفون إطار عمل يسمّونه RG–ASAPF، الذي يربط بقوة بين كيفية تشكيل المجموعة وكيفية حركتها. في جوهره يوجد وصف رياضي للتشكيل بوصفه بنية «قاسية»: تُختار المسافات المطلوبة بين الروبوتات بحيث يتحدد الشكل الكلي بشكل فريد، كقضبان هيكل ثلاثي الأبعاد ثابت. ثم يستخدم كل روبوت قاعدة مشتركة لضبط حركته لاستعادة هذه المسافات والحفاظ عليها، حتى أثناء تحرك التشكيل وانعطافه. صيغت هذه القاعدة للعمل مع كل من الروبوتات الطائرة والبرية، وتتكيّف عبر الإنترنت مع حالات عدم اليقين مثل الاحتكاك غير المُمثل أو الدفعات الخارجية الصغيرة.
السماح للتشكيل بالمرونة أثناء المرور في مساحات ضيقة
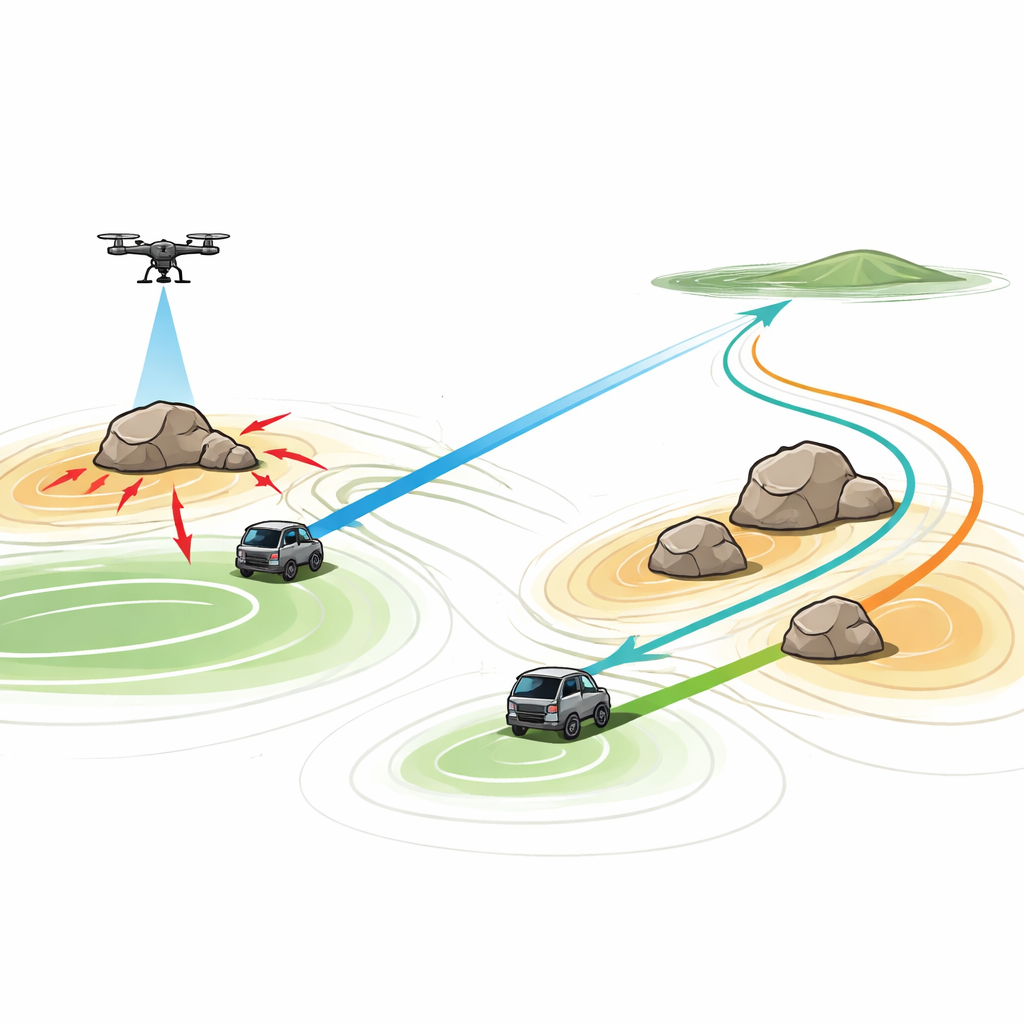
نادرًا ما تكون البيئات الحقيقية حقولًا مفتوحة؛ فهي مليئة بالمباني والأشجار والمركبات والأجسام المتحركة. قد يكون تشكيل آمن في الفضاء المفتوح كبيرًا جدًا للمرور عبر زقاق ضيق أو مجموعة كثيفة من العوائق. تسمح الطريقة المقترحة للتشكيل بالتدرج بسلاسة—التقلص أو التمدد في الحجم الكلي—مع الحفاظ على هيكله الأساسي. يقدم الفريق مركبة أرضية قيادية تخطط مسارًا باستخدام حقل جهد اصطناعي، حيث يعمل الهدف كقابض وتجبر العوائق التشكيل على الابتعاد. على عكس حقول الجهد التقليدية، التي قد تعلق في مآزق أو تتسبب في حركة متذبذبة، فإن نسختهم «الآمنة التكيفية» تضبط باستمرار مدى قوة تنافر العوائق بحيث تحافظ الروبوتات على مسافة آمنة دون أن تصبح مفرطة الحذر أو محاصرة.
مسارات أذكى عبر الازدحام والحركة
يتم تنقيح حقل الجهد أكثر بحيث يكون للنطاق العام للجذب والتنافر دائمًا أدنى نقطة عند الهدف. يساعد هذا على منع التشكيل من التعثر في نقاط محرجة بين العوائق. يتم تعديل قوة التأثير الطارد أثناء الحركة باستخدام قاعدة تعلم بسيطة مقتبسة من تدريب الشبكات العصبية المبكر. عندما تقترب الروبوتات كثيرًا من العوائق، ينمو التنافر تلقائيًا؛ وعندما تتوفر مسافات كافية، يخفّ. إذا أصبح البيئة ضيقة جدًا لدرجة أن التشكيل حتى بعد التصغير لا يمكنه المرور بأمان، تفعل الطريقة خطة بديلة: يتوقف الفريق مؤقتًا، وينفخ ممر أمني افتراضي، ويعيد تخطيط مسار أكثر أمانًا حول المنطقة المشكلة قبل أن يستمر.
الاختبار في عوالم افتراضية
لمعرفة مدى فاعلية الطريقة، يجري المؤلفون محاكاة حاسوبية واسعة مع فرق مختلطة من الطائرات والمركبات الأرضية. يختبرون مناطق مفتوحة تحتوي على عدد قليل فقط من العوائق، ومتاهات كثيفة بها حواجز عديدة، ومشاهد تحتوي على عوائق متحركة، وتشكيلات يجب أن تتحول إلى أشكال ثلاثية الأبعاد أكثر تعقيدًا مثل منشور سداسي. في جميع هذه الحالات، يبقى التشكيل متماسكًا في ثلاثية الأبعاد، ويتجنب العوائق الثابتة والمتحركة بأمان، ويعدّل حجمه عند الحاجة. تتبع الروبوتات مسارات ناعمة وفعالة بدلاً من التفاف حول الحواجز بشكل متعرج. بالمقارنة مع عدة طرق تخطيط شائعة—بما في ذلك حقول الجهد الكلاسيكية والمحسّنة، وتحسين سرب الجسيمات، والتحكم التنبؤي النموذجي الخطي وغير الخطي—تجد المقاربة الجديدة مسارات عادة أقصر وأكثر سلاسة وأقل استهلاكًا للطاقة، كما تحسبها أسرع من تقنيات التحسين الثقيلة.
ما يعنيه هذا للمهام الواقعية
بالنسبة لغير المتخصصين، الرسالة الأساسية هي أن الورقة توضح كيفية جعل فرق مختلطة من الروبوتات الطائرة والبرية تتحرك كجسم مرن واحد عبر مساحات ثلاثية الأبعاد مزدحمة. بدلًا من تفكك التشكيل عند ظهور العوائق، يمكن للمجموعة الانحناء والتقلص وإعادة التوجه مع البقاء متماسكة وآمنة. قد يترجم هذا إلى دعم روبوتي أسرع وأكثر موثوقية خلال الكوارث، وفحوصات صناعية، ودوريات أمنية. بينما العمل الحالي معروض في محاكاة ويعتمد على مركبة قيادية محددة، يحدد المؤلفون خطوات مستقبلية نحو فرق أكثر تحملًا للأخطاء وتجارب في العالم الحقيقي، مما يقرب رؤية أسراب الروبوتات الأرضية-الجوّية المنسقة بإحكام من التطبيق العملي.
الاستشهاد: Chen, Q., Liu, X., Nie, W. et al. Safe formation scaling and motion planning for heterogeneous UAV–UGV teams in cluttered environments. Sci Rep 16, 9127 (2026). https://doi.org/10.1038/s41598-026-37211-9
الكلمات المفتاحية: تشكيل متعدد الروبوتات, تعاون الطائرات بدون طيار والمركبات الأرضية, تجنّب العوائق, تخطيط الحركة, روبوتات جماعية