Clear Sky Science · ar
هيكل خارجي تحكمي للطرف العلوي مع ضبط طول الذراع بدون خطوات واندماج مقاوم قابل للتكيّف مُحفَّز بالقوة
عمل مباشر آمن من مسافة آمنة
لا تزال العديد من أخطر الوظائف على الأرض — وفي الفضاء — تتطلب حكمًا بشريًا ومهارة يد دقيقة. فكر في إصلاح منشأة نووية متضررة، أو التعامل مع مواد متفجرة، أو استقرار مركبة فضائية. تعرض هذه الدراسة نوعًا جديدًا من الهياكل الخارجية المحركة للذراع يسمح للشخص بالتحكم في ذراعٍ روبوتية بعيدة كما لو كانت ذراعه الخاصة، مع بقائه بعيدًا عن الخطر. يهدف الجهاز إلى جعل الروبوت يتحرك ويُـحَسّ كامتداد طبيعي لجسم المُرتدي، حتى أثناء التكيف مع أطوال ذراع مختلفة والقوى المتغيرة في البيئة.
لماذا تهم الأذرع البعيدة
تعمل الروبوتات بالفعل تحت الماء، وفي مناطق الكوارث، وداخل المفاعلات، لكن معظمها إما مبرمج مسبقًا أو يُوجَّه بعصي تحكم بسيطة. وهذا يقيّد ما يمكنها فعله عندما تتغير الظروف فجأة. تقدم أنظمة التحكم عن بُعد — حيث يتحكم إنسان في روبوت بعيد في الوقت الحقيقي — طريقًا وسطًا يربط بين اتخاذ القرار البشري وقوة ونطاق الروبوت. كانت الأنظمة السابقة تستطيع تحريك الأدوات، لكنها غالبًا ما افتقرت إلى تغذية راجعة دقيقة عن القوى ولم تستطع التكيّف بسهولة مع أجسام مستخدمين مختلفين. وكانت النتيجة حركة متثاقلة، وإحساس ضعيف، وإجهاد إضافي لكل من المشغل والآلة.
روبوت بديل يرتديه الجسم ويناسب فعلاً
بنى الفريق هيكلًا خارجيًا قابلًا للارتداء للطرف العلوي مع سبع مفاصل محركة تتوافق مع الكتف والمرفق والمعصم. تحافظ المواد خفيفة الوزن مثل ألياف الكربون والألمنيوم على استجابة الجهاز بدلاً من أن يكون ثقيلًا وبطيئًا. ابتكار رئيسي هو أن طول الذراع العلوية والساعد في الهيكل الخارجي قابل للتعديل بسلاسة، لا بعدة درجات ثابتة. تقيس قضبان انزلاقية مزودة بمستشعرات كهربائية مدمجة طول الذراع الفعلي للمُرتدي بشكل مستمر وتغذي تلك المعلومات إلى نموذج رقمي للجسم. ونتيجة لذلك، يعيد الجهاز تشكيل هندسته الداخلية تلقائيًا لكل شخص، مما يحسّن الراحة ويجعل حركات الروبوت أكثر وفاءً لنوايا الإنسان. 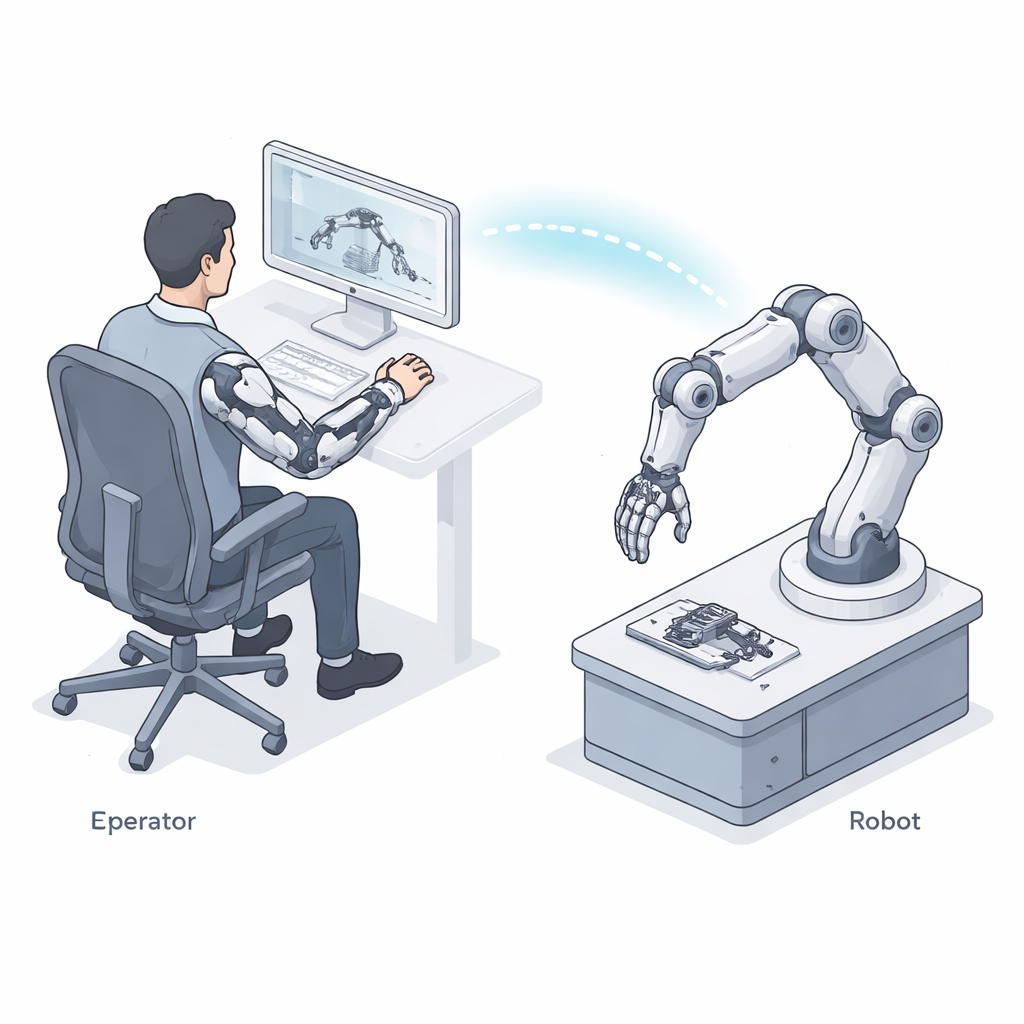
التحرك مع الجسم لا ضدّه
لا تدور أكتاف البشر ببساطة مثل محاور؛ فكِ الكتف ينزلق أيضًا عبر القفص الصدري. تتجاهل العديد من الهياكل الخارجية هذا وتنتهي بمقاومة الحركة الطبيعية، مما يسبب الانزعاج. يضيف هذا التصميم وحدة سلبية بها عدة درجات حرية إضافية تواكب بهدوء التحركات الطفيفة للكتف وجزء الجسم العلوي، مما يخفف الضغط على الجلد والمفاصل. في الوقت نفسه، يتم ضبط المفاصل المحركة بحيث يبقى عزمها — قوة الالتواء — أقل من حدود الأمان للأنسجة البشرية. تكمل مميزات السلامة نظاميات الإيقاف الطارئ وكاشفات الانسداد، مما يسمح للنظام بالاستجابة بسرعة إذا حدث خطأ ما.
طريقة أذكى لإحساس التلامس
بعيدًا عن الميكانيكا، يركز المؤلفون على ما يشعر به المُرتدي. عندما تلمس الروبوت البعيد أو تدفع شيئًا — جدارًا أو مقبض أداة أو جسمًا آخر — تُترجم تلك القوى عائدًا عبر الهيكل الخارجي بحيث يشعر المستخدم بالمقاومة. يمزج نظام التحكم بين حاجتين تتعارضان عادة: تتبع دقيق لحركات المشغل وسلوك طيع ولين عندما تزداد قوى التلامس. عند القوى المنخفضة، يتصرف النظام بصلابة ودقة، متتبعًا مسار ذراع المُرتدي عن كثب. ومع ارتفاع القوى فوق عتبة أمان، يلين التحكم تلقائيًا، مما يتيح بعض الامتداد ليُوسّع الصدمات بدل أن تكون صادمة. يستخدم المؤلفون أدوات رياضية قائمة على الطاقة لإظهار أن هذا السلوك الممزوج يظل مستقرًا بدلاً من الانزلاق إلى تذبذبات. 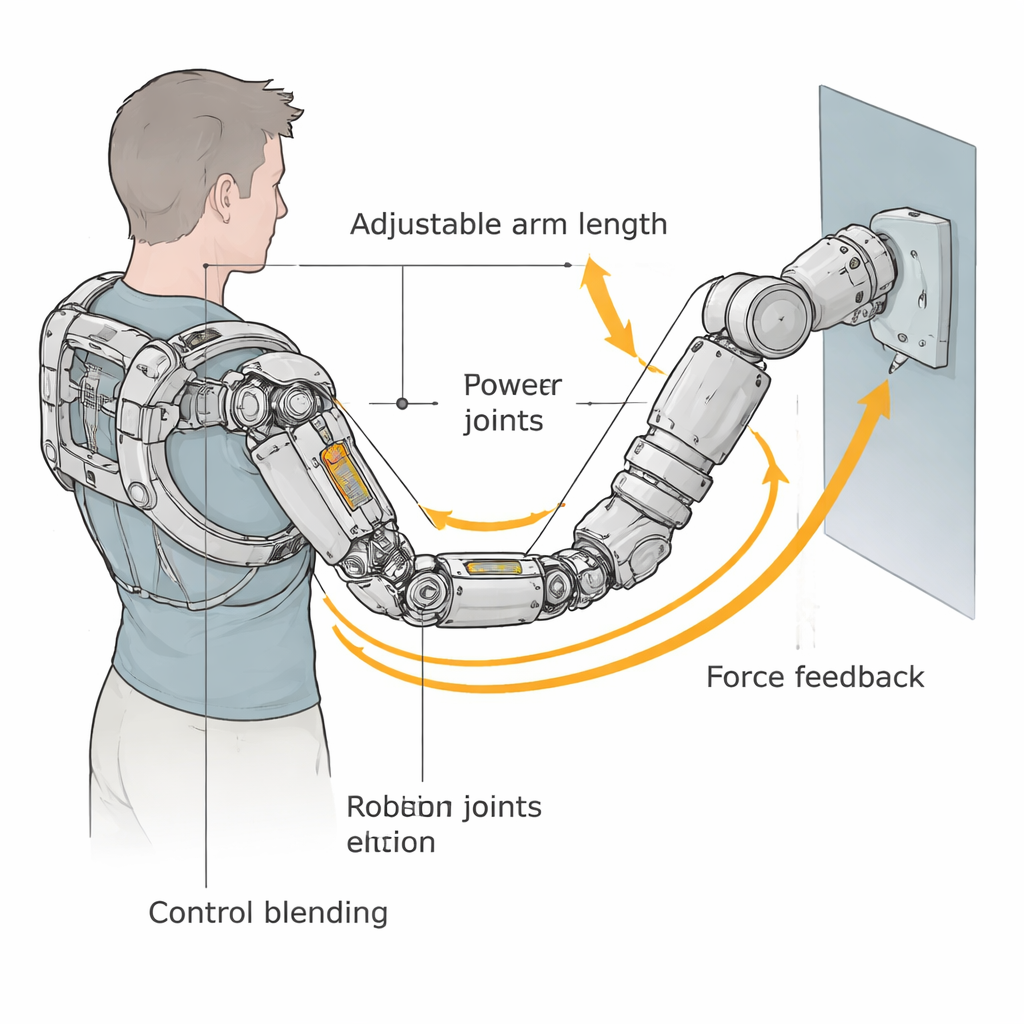
وضع النظام تحت الاختبار
لتقييم الهيكل الخارجي، ربط الباحثون الجهاز بذراع روبوت صناعي مستخدم على نطاق واسع. عندما تتبع شخص يرتدي الهيكل الخارجي مسارًا على شكل ثمانية في الهواء، أعاد الروبوت البعيد إنتاج الحركة عن كثب، رغم تأخيرات اتصال صغيرة. اختبرت تجارب إضافية مدى جودة قياس طول الذراع: تطابقت قراءات الفولتية من المستشعرات الانزلاقية مع القياسات الفيزيائية بأخطاء تقل عن بضعة ملليمترات، حتى بعد ارتداء وخلع متكرر. في محاكاة خاضعة للضبط حيث ضغط الروبوت على جدار افتراضي صلب، قلّص مخطط التحكم الكامل ذروات قوى التلامس بحوالي 70 بالمئة مقارنةً بإعداد أساسي، مع الحفاظ إلى حد كبير على دقة التتبع في الحركة الحرة.
ماذا يعني هذا للعمل والرعاية في العالم الحقيقي
بعبارات مبسطة، تقربنا هذه الأبحاث من روبوتات بعيدة يشعر التحكم بها طبيعيًا وآمنًا كما لو أننا نحرك ذراعنا بأنفسنا. من خلال الجمع بين إطار قابل للتعديل يلتف حول الجسم، وتتبع دقيق للحركة البشرية، وتغذية راجعة ذكية للقوة تتكيف لحظيًا، يعد النظام بتشغيل تحكم عن بُعد أكثر دقة وأقل إجهادًا في البيئات الخطرة. يمكن أن تخدم نفس التقنية أيضًا المرضى المتعافين من السكتة الدماغية، إذ يسمح للمعالجين بتوجيه وتسجيل حركات الذراع بينما يتلقى المرضى مساعدة وتغذية راجعة واقعية. ومع دمج الإصدارات المستقبلية إشارات من العضلات ونظرة العين والتعلم من الخبرة، قد تُصبح أزواج الهيكل الخارجي والروبوت أدوات متعددة الاستخدامات للمهمات القصوى ولإعادة التأهيل اليومي.
الاستشهاد: Zeng, P., Xu, Y., Zheng, S. et al. An upper-limb teleoperation exoskeleton with stepless arm-length parameterization and adaptive force-triggered impedance blending. Sci Rep 16, 7529 (2026). https://doi.org/10.1038/s41598-026-37205-7
الكلمات المفتاحية: هيكل خارجي للتحكم عن بُعد, تحكم ذراع آلية, تغذية راجعة للقوة, روبوتات التأهيل, عمليات خطرة عن بُعد