Clear Sky Science · ar
التقدير الفوري لحالة شحن البطارية واستراتيجية الشحن المستقل لروبوت شحن تخزين طاقة ديناميكي باستخدام مرشح كالمان الممتد
لماذا تهم بطاريات الروبوتات الأذكى
من سعاة المستودعات إلى روبوتات التفتيش، تعتمد فائدة الروبوتات المتنقلة على قدرات بطارياتها. إذا أخطأ الروبوت في تقدير كمية الطاقة المتبقية، فقد يتعطل بعيدًا عن محطة الشحن، ما يوقف العمل ويعرض البطارية لخطر التلف. تعرض هذه الورقة طريقة جديدة تُمكّن الروبوتات من "معرفة" مستوى بطاريتها الحقيقي في الزمن الفعلي واختيار متى وكيف تعيد شحن نفسها، بحيث تعمل لفترات أطول وبأمان أكبر ومع إشراف بشري أقل.

الروبوتات والمهام المكثفة والبطاريات المتوترة
على عكس السيارات الكهربائية التي تقود بسلاسة على الطرق السريعة، تواجه العديد من الروبوتات المتنقلة بدايات وتوقفات حادة وتغيرات متكررة في عبء العمل. تتسبب هذه الصدمات في تقلبات سريعة في تيار وجهد البطارية، مما يربك طرق التقدير التقليدية للشحنة المتبقية. الطرق البسيطة التي تقيس الجهد فقط أو تحسب التيار عبر الزمن تفترض عادة ظروفًا هادئة وثابتة ولا تتتبع كيف تتقدم البطارية في العمر أو ترتفع حرارتها. نتيجة لذلك، تنجرف تقديراتها وتتراكم الأخطاء، وقد ينتهي الأمر بالروبوت إلى الشحن المتكرر أو إجهاد البطارية بشكل مفرط، ما يقصر عمرها.
نموذج أذكى لما يحدث داخل البطارية
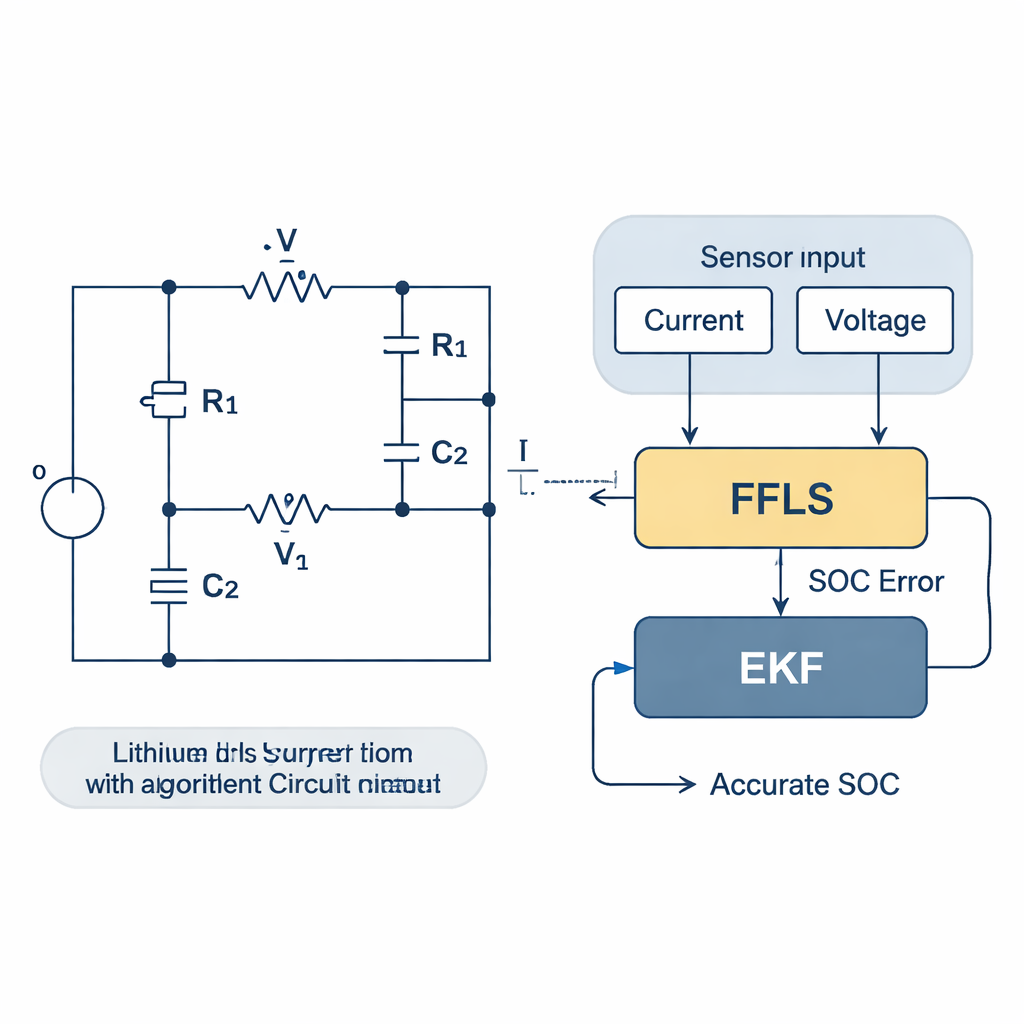
يتعامل المؤلفون مع هذه المشكلة من خلال تزويد الروبوت بصورة أكثر واقعية لحزمة بطارية فوسفات حديد الليثيوم الخاصة به. بدلاً من اعتبار البطارية صندوقًا أسود برقم جهد واحد، يمثلونها كشبكة كهربائية بمقاومة داخلية وفرعين "استقطاب" يحاكيان حركة وتراكم الأيونات داخل الخلية. يلتقط هذا النموذج من الرتبة الثانية من نوع RC الاستجابات السريعة والبطيئة لتغيرات الحمل. يقيس الروبوت باستمرار التيار والجهد ويلائم هذه الإشارات مع النموذج باستخدام طريقة المربعات الصغرى التي تتضمن "عامل نسيان" — طريقة رياضية لإعطاء وزن أكبر للبيانات الحديثة وتلاشي التاريخ القديم عندما تتغير الظروف.
السماح للخوارزمية بالتعلم والتكيف أثناء العمل
فوق هذا النموذج، يطبق الفريق مرشح كالمان الممتد، وهي أداة مستخدمة على نطاق واسع لتتبع الحالات الخفية في بيانات مشوشة. هنا، الحالة الخفية هي حالة الشحنة الحقيقية للبطارية. أثناء عمل الروبوت، يتنبأ المرشح بكيفية تغير الشحنة اعتمادًا على النموذج والتيار المقاس، ثم يصحح هذا التنبؤ باستخدام الجهد المقاس. وحدة المربعات الصغرى بعامل النسيان تواصل تحديث معلمات النموذج الرئيسية عبر الإنترنت، بحيث لا يعتمد المرشح على وصف بطارية قديم أو معاير المصنع. وبذكاء، يستغل الباحثون أيضًا علاقة بين المقاومة الداخلية وكمية تسمى سعة الاستقطاب: مع ارتفاع الحرارة تنخفض المقاومة وتزداد السعة. بمراقبة كلاهما معًا، يمكن للنظام استنتاج تأثيرات الحرارة دون أي حساس حرارة مادي وتعديل النموذج وفقًا لذلك.
تعليم الروبوتات متى وكيف تشحن
تقديرات الشحنة الدقيقة ليست سوى نصف القصة؛ النصف الآخر هو كيفية استخدام الروبوت لها. يصمم المؤلفون استراتيجية شحن مستقلة تتجنب كلًا من الشحن المستمر الخفيف وعمق التفريغ الكبير. يعرفون حدودًا عليا وسفلى للشحنة: إذا هبطت البطارية تحت عتبة، يعطي الروبوت أولوية للعودة إلى المرسى؛ وإذا كانت قريبة من الحد العلوي، يؤجل الشحن ويستمر في العمل. ضمن النطاق الآمن، يعيد الروبوت الشحن خلال لحظات الخمول. يراقب النظام أيضًا كل خلية في حزمة البطارية ويوازن شحنتها بحيث لا تمتلئ خلية بينما تتخلف أخرى، وهي خطوة أساسية لمنع الشيخوخة المبكرة. لجعل عملية الإرساء فعالة، يجمع الروبوت بين ملاحة على مستوى الغرفة وإرشاد بالأشعة تحت الحمراء قصير المدى، مما يقصر المسارات ووقت الإرساء.
طاقة روبوتية تدوم أطول وأكثر موثوقية
في اختبارات باستخدام مجموعات بيانات بطارية عامة ومحاكاة وروبوتات حقيقية، قدّرت الطريقة الجديدة حالة الشحنة بدقة تقارب 98%، متفوقة بوضوح على عدة بدائل متقدمة تعتمد على مرشحات الجسيمات والشبكات العصبية والمحولات. حافظت البطاريات المدارة بهذه الطريقة على شحنتها بشكل أفضل عبر أسابيع من الاستخدام المحاكى وبقيت صالحة لمزيد من دورات الشحن والتفريغ بنسبة 15–40% أكثر من الطرق المنافسة. نمت المقاومة الداخلية بشكل أبطأ، وهو مؤشر على خلايا أكثر صحة، وقضت الروبوتات وقتًا أقل في المرسى مع الحفاظ على صحة بطارية أعلى. للمختص غير المتعمق، الخلاصة أن هذه التقنية تمكّن الروبوتات من أن تصبح "قائمين رعاية" أفضل لبطارياتها: يمكنها تقييم طاقتها بدقة أكبر، اختيار أوقات أذكى للشحن، وتمديد عمر العمل لحزم البطاريات المكلفة بهدوء دون حساسات إضافية أو قدرة حوسبة ثقيلة.
الاستشهاد: Zhou, Y., Liang, X., Li, W. et al. Real time estimation of battery SOC and autonomous charging strategy for dynamic energy storage charging robot with extended Kalman filter. Sci Rep 16, 7810 (2026). https://doi.org/10.1038/s41598-026-37184-9
الكلمات المفتاحية: الروبوتات المتنقلة, حالة شحن البطارية, الشحن المستقل, مرشح كالمان الممتد, بطاريات فوسفات حديد الليثيوم