Clear Sky Science · ar
YOLO-DC لاكتشاف المركبات باستخدام شبكات الالتفاف القابلة للتشوه والانتباه الإحداثي عبر القنوات
لماذا يهم رصد السيارات بالكاميرات فعلاً
تعتمد المدن الحديثة على كاميرات تراقب الطرق المزدحمة، فتساعد على إدارة الاختناقات المرورية وتمهد الطريق للسيارات ذاتية القيادة. لكن تمييز كل مركبة بشكل موثوق في تلك اللقطات أمر أصعب مما يبدو، خصوصاً عندما تظهر السيارات صغيرة في المسافة أو مخفية جزئياً في الاختناقات أو مشوشة بفعل المطر أو الضباب أو الظلام. يقدم هذا البحث نظام رؤية حاسوبية جديد اسمَه YOLO‑DC يهدف إلى رصد السيارات والحافلات والمركبات الأخرى بسرعة ودقة، حتى في ظروف العالم الحقيقي الفوضوية وعلى أجهزة ذات قدرة حاسوبية محدودة.
مشكلة المرور وراء البحث
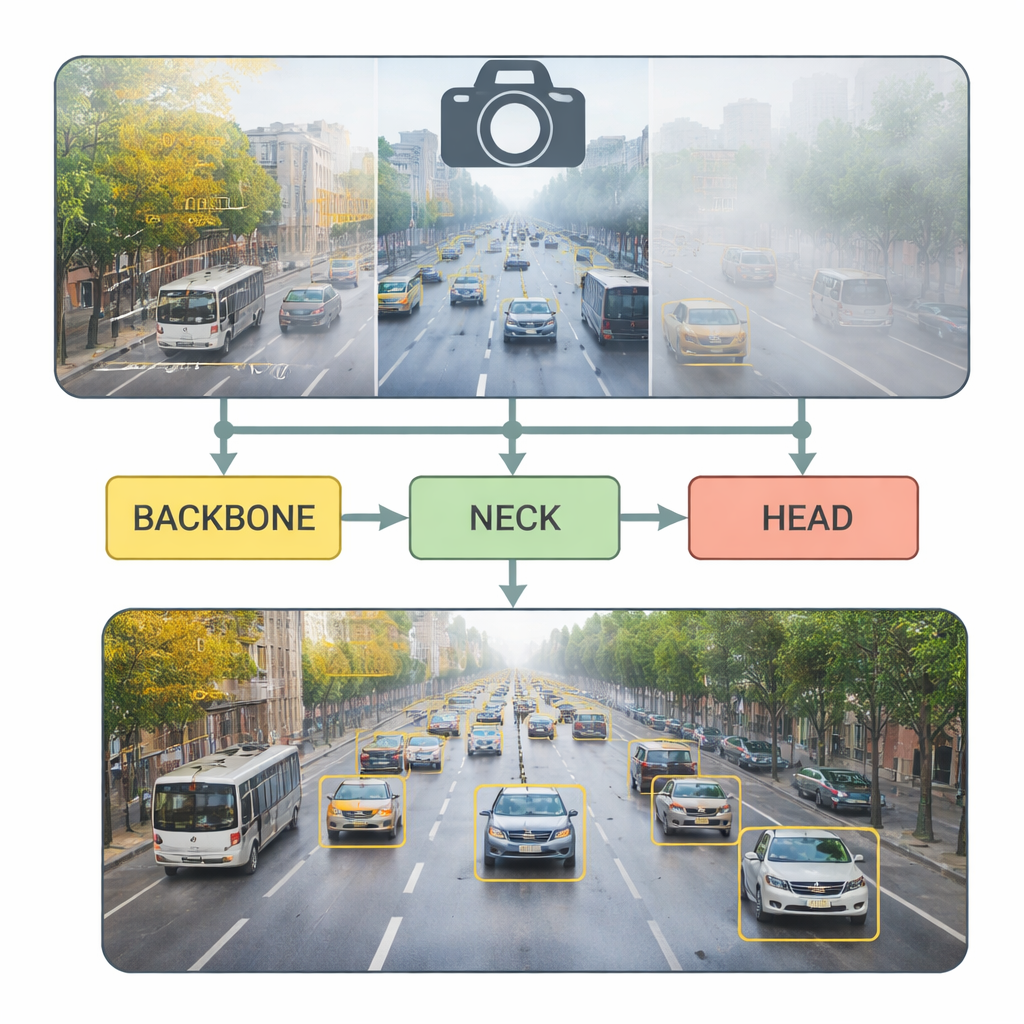
تواجه المدن المتنامية طرقاً مزدحمة وحوادث متزايدة وانبعاثات أعلى. تعد نظم النقل الذكي بالمساعدة عبر مراقبة الحركة في الوقت الحقيقي وتوجيه السائقين البشريين والذاتيين. المكون الأساسي هنا هو كشف المركبات بسرعة وبشكل موثوق في الفيديو. خوارزميات "المرحلتين" السابقة تفحص الصور على دفعات متعددة وقد تكون دقيقة جداً، لكنها غالباً ما تكون بطيئة للغاية للاستخدام في الوقت الحقيقي على كاميرات الطرق أو داخل المركبات. الأنظمة الأحدث ذات "المرحلة الواحدة"، مثل عائلة YOLO ("You Only Look Once"), تتخلى عن بعض التعقيد مقابل سرعة أعلى بكثير، مما جعلها شائعة عملياً. مع ذلك، لا تزال تواجه صعوبات مع المركبات الصغيرة والمتداخلة ومع الطقس القاسي الذي يخفي التفاصيل. يبني YOLO‑DC على أحدث نموذج YOLOv8 ويعيد تصميم طبقاته الداخلية للتعامل بشكل أفضل مع هذه التحديات.
كيف يرى YOLO‑DC أكثر بتركيز أذكى
في قلب YOLO‑DC شبكة "عمق" مُجدَّدة، الجزء الذي يحول الصور الخام أولاً إلى ميزات مجردة. يقدم الباحثون آلية تسمى الانتباه الإحداثي عبر القنوات، التي تعلم الشبكة ليس فقط أين تنظر في الصورة بل أيضاً أي أنواع الأنماط البصرية تستحق وزنًا أكبر. إلى جانب ذلك، تُستخدم الالتفافات القابلة للتشوه — مرشحات يمكنها تعديل نمط العينة لمتابعة مركبات مائلة أو ذات أشكال غير اعتيادية — ليتمكّن العمق من التكيف بشكل أفضل مع السيارات الملتقطة من زوايا ومقاييس ومواقع مختلفة. بدلاً من معاملة كل بقعة في الطريق على قدم المساواة، يتعلم النظام إبراز المخططات والقوام الدالة التي تميّز المركبات الحقيقية عن المباني أو الأشجار أو علامات الطريق.
التقاط المركبات الصغيرة والبعيدة دون إبطاء الأداء
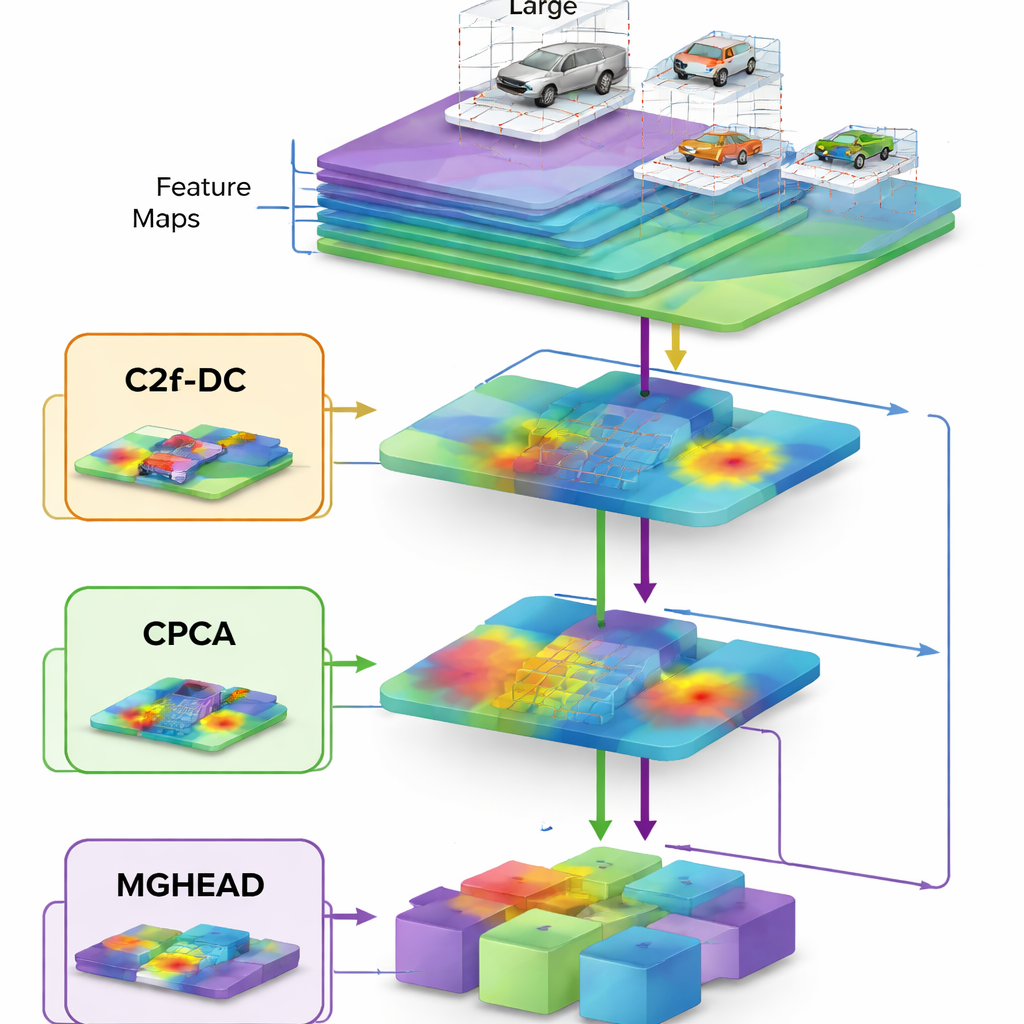
الجزء الأوسط من النموذج، المعروف بالعنق، مسؤول عن دمج المعلومات من مشاهد موسعة وخشنة مع التفاصيل الدقيقة المقربة. يطوّر YOLO‑DC هذه المرحلة بطريقتين. أولاً، يساعد نموذج انتباه جداء القنوات الشبكة على قمع الضوضاء وإبراز الإشارات الطفيفة الصادرة عن المركبات الصغيرة البعيدة في الإطار. ثانياً، قطعة معاد تصميمها مستوحاة من بنية FasterNet الخفيفة تقلل عدد العمليات عبر تطبيق الالتفافات الكاملة على جزء فقط من البيانات ثم خلطها بكفاءة. هذا التصميم الحذر يقلل من عدد المعاملات وكمية حركة الذاكرة، مما يسمح للنموذج بالعمل أسرع مع تحسين الدقة — مزيج غير شائع ولكنه مرغوب بشدة لأجهزة الحافة مثل كاميرات المرور وأجهزة الحاسوب داخل المركبات.
رؤية المركبات عبر مقاييس متعددة وفي الطقس السيئ
المرحلة النهائية، أو الرأس، تقرر أين الكائنات وما هي. يقدم YOLO‑DC التلافيف المجمعة متعددة المقاييس هنا، حيث يقسم خرائط الميزات إلى عدة مجموعات قنوية يستخدم كل منها أحجام مرشحات مختلفة قبل إعادة دمجها. يمنح ذلك الكاشف إحساساً أغنى بالمقياس، فيستطيع التعرف على الحافلات الضخمة التي تملأ الإطار والشاحنات متوسطة الحجم والسيارات الصغيرة بالكاد المرئية في المسافة، كلها في آن واحد. في اختبارات واسعة على مجموعة بيانات UA‑DETRAC، التي تحتوي مشاهد طرقية تحت ظروف غائمة ومشمسة وممطرة وفي أوقات الليل، حقق YOLO‑DC دقة تنافس أو تتفوق على أفضل الكواشف مع استخدام جزء صغير فقط من حساباتها وتشغيل مئات الإطارات في الثانية على أجهزة حديثة. وعلى مجموعة DAWN المصممة خصيصاً للضباب والمطر والثلوج والعواصف الرملية، قدم النموذج الجديد مكاسب كبيرة خاصة في الأمطار الغزيرة والضباب الكثيف، حيث تفشل الأنظمة التقليدية غالباً.
ماذا تعني النتائج للطرقات اليومية
لغير المتخصصين، الرسالة الأساسية هي أن YOLO‑DC أفضل في "رؤية" حركة المرور الحقيقية كما تبدو فعلاً: مزدحمة وفوضوية وغالباً ما تكون مغطاة بالطقس السيئ أو الإضاءة الضعيفة. من خلال الجمع بين مرشحات مرنة تتبع أشكال المركبات وآليات انتباه تركز على المناطق الأكثر إفادة، يكتشف النظام مزيداً من المركبات ويقلل من الفاقد ويعمل بسرعة كافية لتحليل الفيديو المباشر على أجهزة متواضعة. هذا يجعله لبنة واعدة لأنظمة إدارة المرور الأكثر ذكاء، ولمراقبة الحوادث بشكل أكثر موثوقية، وللقيادة الذاتية الآمنة — مع إبقاء تكاليف المعالجة منخفضة بما يكفي للنشر على نطاق واسع عبر شوارع المدينة والمركبات المستقبلية.
الاستشهاد: Liu, Z., Zhu, M., Gao, B. et al. YOLO-DC for vehicle detection using deformable convolutional networks and cross-channel coordinate attention. Sci Rep 16, 6284 (2026). https://doi.org/10.1038/s41598-026-37094-w
الكلمات المفتاحية: كشف المركبات, النقل الذكي, YOLO, الطقس القاسي, الرؤية في الوقت الفعلي