Clear Sky Science · ar
سلسلة ديناميكية لجدولة نظم المركبات الموجهة الآلية المتعددة مع نمذجة حركة واعية بالحمل
لماذا تحتاج روبوتات المخازن إلى توقيت أفضل
ملأت التسوق عبر الإنترنت المستودعات ببضائع يجب تحريكها بسرعة وأمان وعلى مدار الساعة. تعتمد العديد من المنشآت الآن على أساطيل من روبوتات الأرض—المركبات الموجهة الآلية (AGVs)—لنقل الأرفف والمنصات. لكن إذا جُدولت هذه الروبوتات بافتراضات مبسطة للغاية عن كيفية حركتها، فقد تهدر الوقت، أو تهتز الطرود الحساسة، أو حتى تتسبب في مخاطر تصادم. تعرض هذه الورقة طريقة جديدة للتخطيط وتنسيق العديد من AGV في آن واحد من خلال أخذ سلوكها الفيزيائي الحقيقي بالحسبان، ما يعد بحركة أكثر سلاسة وبضائع أكثر أمانًا في المستودعات المزدحمة.
روبوتات تنقل البضائع، وليس الأرقام فحسب
تعبر المركبات الموجهة الآلية الحديثة المستودعات والمطارات والمصانع بالفعل، سَاحِبة عربات أو رافعة أرفف ومنصات. تعمل معظم البرمجيات الحالية التي تدير هذه الأساطيل على مستوى عالٍ: تقرر أي روبوت يجب أن يتولى أي مهمة والمسار التقريبي الذي ينبغي أن يسلكه. ولتبسيط الحسابات، تفترض عادةً أن زمن السفر بين نقطتين ثابت، متجاهلةً مدى قدرة الروبوت على التسارع أو التباطؤ فعليًا، أو مدى ثِقَل حمّله. يوضح الباحثون أن هذه الحيلة تخلق مشاكل في المباني الواقعية. فقد يصل الروبوت إلى التقاطعات أبكر أو أَخَر مما هو متوقع، ما يزيد احتمال حدوث اختناقات مرورية أو اقتراب خطير أو فرملة مفاجئة تهز ما يحملونه.
إضافة فيزياء العالم الحقيقي إلى الجدول
يتناول الباحثون هذه الفجوة بنهج من مرحلتين يمزج الفيزياء بالجدولة. أولاً، يصممون مقدرًا لزمن السفر الديناميكي للمركبات الموجهة الآلية، يسمى DTT-AGV. بدلًا من اعتبار الممر كمقطع زمني واحد، يكسر DTT-AGV كل حركة إلى مراحل: التسارع، والإبحار بسرعة ثابتة، والتباطؤ. يستخدم نموذجًا ميكانيكيًا بسيطًا لروبوت يحمل رفًا، حيث يتصرف الرف ككتلة مرتبطة بزنبركات ومخمدات. يلتقط هذا النموذج كيف يمكن للتسارع والتباطؤ أن يجعلا الحمولة تتأرجح أو تهتز. من ذلك، يحسب الخوارزمية السرعة الآمنة التي يمكن للمركبة أن تسير بها لمسافة معينة وحمولة معينة دون تجاوز حدود السرعة أو القوة أو الاهتزاز، ويُرجع زمن سفر واقعي لكل جزء من المسار.
منع لقاءات الأنوف بين الروبوتات
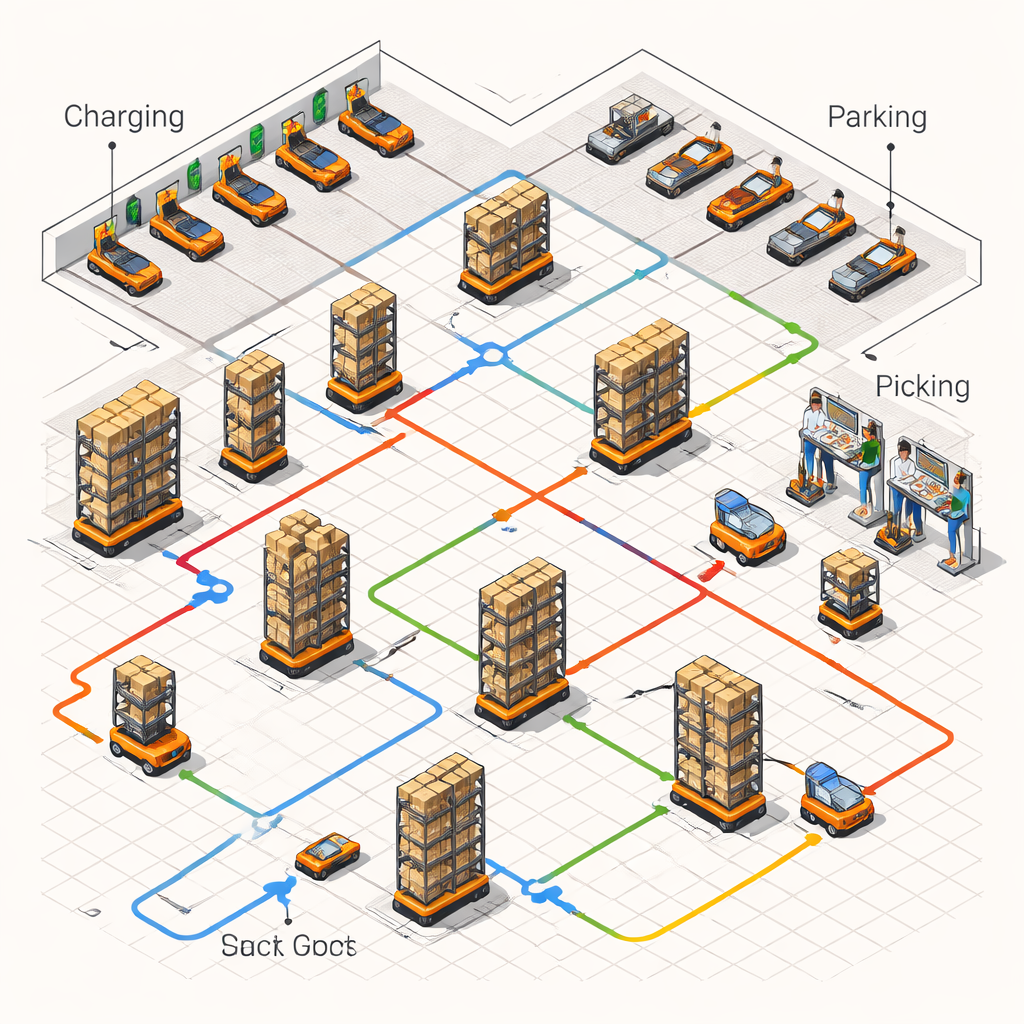
ثانيًا، يقدم الفريق طريقة ربط أوقات الوصول، ATC-AGV، التي تنسق العديد من الروبوتات على مسارات مشتركة. بمجرد أن يقدر DTT-AGV مدة كل مقطع، يعين ATC-AGV أوقات وصول ومغادرة دقيقة عند كل عقدة—التقاطعات أو المنعطفات أو نقاط النقل—على طول مسار كل روبوت. يبني "سلسلة" زمنية عند كل عقدة مشتركة، ضامنًا وجود هامش أمان بين المركبات مع الأخذ في الاعتبار حالات الروبوت الحالية، مثل ما إذا كان محملاً أو يشحن أو يدور. إذا كان الخطة الجديدة قد تتسبب في تواجد مركبتين في نفس العقدة على فترات زمنية متقاربة جدًا، يقوم ATC-AGV بتحريك جدول أحد الروبوتات بالقدر الكافي لاستعادة هامش الأمان. في الممارسة، يحول ذلك شبكة أرضية المستودع إلى خريطة واعية بالزمن تساعد على منع التصادمات قبل أن تنشأ.
اختبار حركة أكثر سلاسة وركوب ألطف
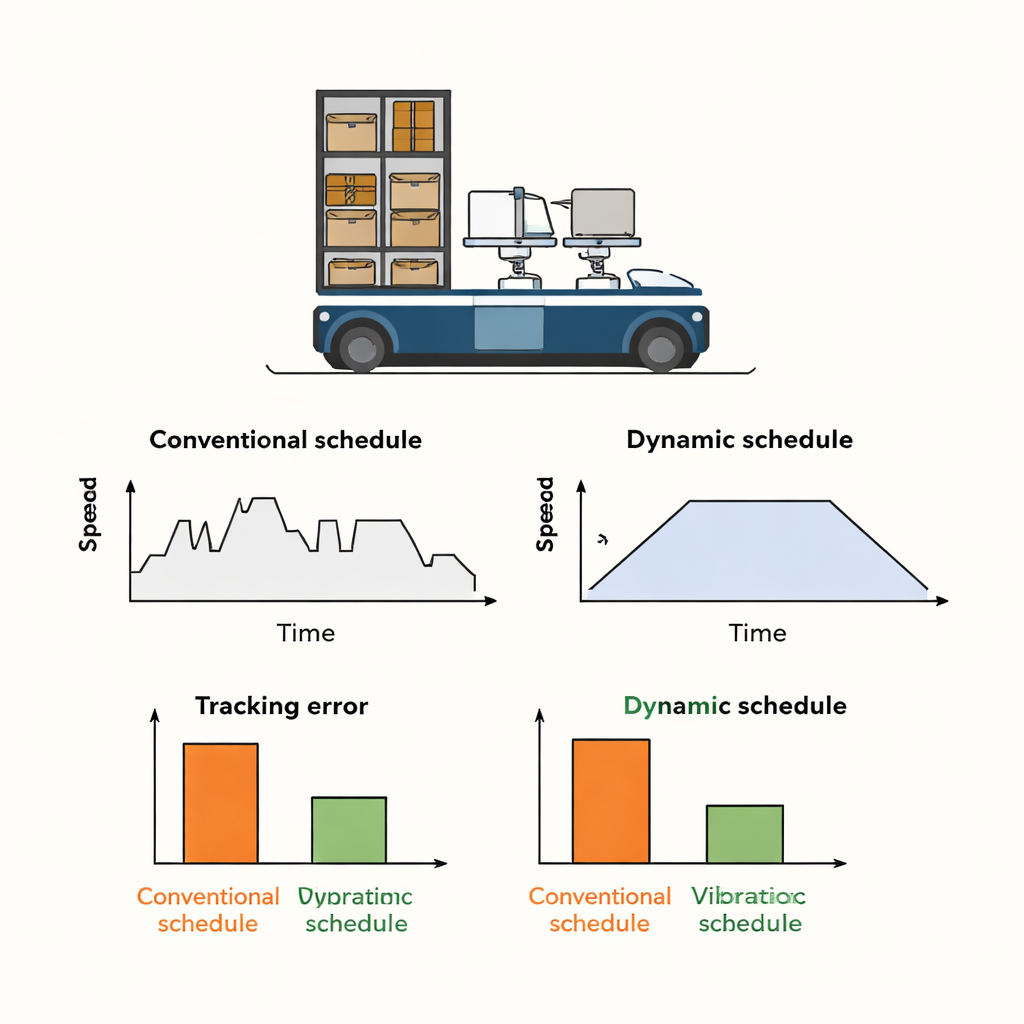
لاختبار أفكارهم، يحاكي المؤلفون AGV في مستودع تقاطع شبكي من نوع cross-docking يتضمن مناطق شحن ومواقف ومناطق أرفف. يقارنون مخططهم مع طريقة تقليدية تفترض سرعة ثابتة تقريبًا وتتجاهل مراحل الحركة المفصلة. في اختبار واحد، يسلك روبوت مسارًا على شكل حرف L ثم يدور بزاوية 90 درجة. تُولِّد الطريقة التقليدية تغييرات حادة في السرعة عند الزاوية، وهو ما لا يستطيع الروبوت الحقيقي متابعته بدقة. النتيجة أخطاء تتبع كبيرة—فوارق بين المكان الذي ينبغي أن يكون فيه الروبوت والمكان الذي هو فيه بالفعل—وارتفاعات مفاجئة في خطأ التوقيت عند نقاط محورية. مع المخطط الجديد، يُقسَّم المسار إلى مراحل واضحة للتسارع والإبحار والفرملة. يتتبع الروبوت المحاكى الآن مساره الهدف عن كثب، مع أخطاء أصغر بكثير وتحولات أكثر سلاسة.
أكثر لطفًا مع الطرود ومؤمن للمستقبل
تتركز مجموعة الاختبارات الثانية على سلوك الحمل نفسه. عند استخدام الجدول التقليدي، تتعرض قاعدة الروبوت لاهتزازات مفاجئة في التسارع تُثير سلوك الزنبرك في الرف، ما يسبب اهتزازات قوية في الحمولة. مع الجدولة الديناميكية الواعية بالحمل، تبقى التسارعات ضمن نطاق أضيق وتتغير بشكل أكثر اعتدالًا. مقاسة عبر الزمن، ينخفض كل من الذروة والمتوسط للاهتزازات في الحمولة بشكل حاد، وهو أمر حاسم للبضائع الهشة أو المكدسة أو غير المستقرة. يفحص المؤلفون أيضًا كيف قد تؤثر عوامل مهملة مثل احتكاك العجلة بالأرض على تقديراتهم ويجدون أن، تحت ظروف المستودعات النموذجية، يبقى خطأ التوقيت الإضافي ضمن وسائد الأمان المضمَّنة في خوارزميتهم.
ماذا يعني هذا للمستودعات الحقيقية
بعبارات بسيطة، يعلم هذا العمل مجدولي AGV أن يحترموا الحركة الحقيقية للآلات التي يتحكمون بها. من خلال تأسيس أزمنة السفر وقرارات حق المرور على أساس مدى سرعة الروبوتات الحقيقية في التسارع والتباطؤ وحمل أوزان مختلفة دون تمزيق شحناتها، يقلل الإطار المقترح أخطاء تتبع المسار، ويخفض اهتزازات البضائع، ويقلل مخاطر التعارضات عند التقاطعات. بالنسبة لمشغلي ومصنعي المستودعات، يترجم ذلك إلى حركة أكثر سلاسة، ومعالجة أكثر أمانًا للبضائع، وأساس قابل للتوسع مع نمو الأساطيل وتعقيد التخطيطات.
الاستشهاد: Nguyen, T.P., Nguyen, H., Phan, D.M. et al. Dynamic chain for scheduling of the multi-AGV systems with load-aware motion profiling. Sci Rep 16, 6832 (2026). https://doi.org/10.1038/s41598-026-37083-z
الكلمات المفتاحية: المركبات الموجهة الآلية, روبوتات المخازن, الجدولة خالية من التصادم, تخطيط الحركة, اللوجستيات الذكية