Clear Sky Science · ar
الالتحام الجدارية لطائرة رباعية الدوار باستخدام تحكم تكيفي مستمر من الرتبة الثانية في وجود حالات عدم اليقين
لماذا يهم أن تلتصق الطائرات بلا طيار بالجدران
تخيل طائرة صغيرة لا تظل تحوم حتى نفاد البطارية فحسب، بل تستطيع أن تحط بهدوء على جدار مثل طائر، ثم تبقى هناك لساعات تراقب جسراً أو حقل محاصيل أو حافة غابة. يقدم هذا البحث طريقة جديدة للتحكم في مثل هذه الطائرات "الملتصقة" بحيث يمكنها الطيران إلى سطح رأسي، والاتصال به دون الارتداد، والتشبث به بثبات حتى عندما يكون الهواء مضطرباً أو سلوك الطائرة غير معروف بدقة. يتعامل هذا العمل مع التحدي المتمثل في تحويل آلة طائرة هينة إلى أداة فحص موثوقة وموفرة للطاقة.
من الروبوتات المعلقة إلى الكشافة الملتصقة بالجدران
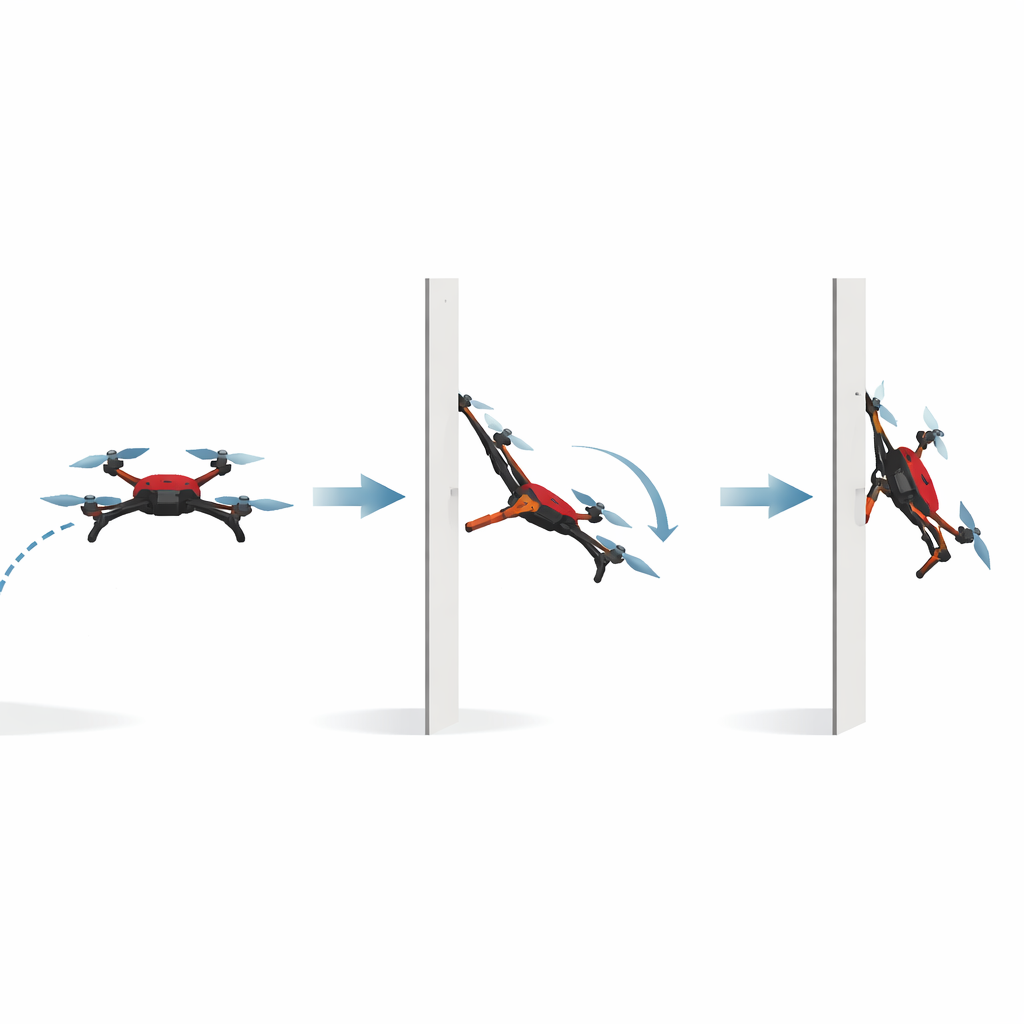
تُستخدم الطائرات الرباعية الدوار الصغيرة بالفعل في رسم الخرائط، وفحص البناء، ومراقبة الحياة البرية، والزراعة الدقيقة. ومع ذلك فإن أكبر قيودها هو التحمل: الطيران في حالة ثبات يستهلك طاقة البطارية. يتيح الالتصاق بسطح—مثل جدار أو عمود أو أسفل جسر—للطائرة إيقاف معظم محركاتها مع إبقاء حسّاساتها في مكانها للمراقبة طويلة الأمد. لكن تنفيذ ذلك بأمان ليس بالأمر البسيط. خلال مناورة الالتصاق القصيرة ولكن الحرجة، يجب على الطائرة الاقتراب من الجدار، ولمسه، والدوران إلى وضع أنف لأسفل دون ارتداد أو انزلاق أو فقدان السيطرة عند حدوث هبات ريح مفاجئة أو أخطاء في النمذجة.
تحدي الهبوط النظيف على الجدار
يدرس المؤلفون طائرة رباعية الدوار مجهزة بذراع دعم خفيف في مقدمتها يعمل كنقطة اتصال مادية مع الجدار. مع انتقال الطائرة من الطيران الحر إلى الاتصال، ترتبط مواضعها (جانبيًا، للأمام، عموديًا) وموقفها (زوايا التدحرج، والpitch، والyaw) ارتباطًا وثيقًا: فالتغيير في الاتجاه يغير كيف يتحول الدفع إلى حركة، والقوة التفاعلية المفاجئة من الجدار يمكن أن تلوّي جسم الطائرة. بالإضافة إلى ذلك، تؤثر في العالم الحقيقي ظواهر مثل التفاعلات الهوائية قرب الجدار، وعدم دقة التصنيع الصغيرة، وضوضاء الحساسات—كلها كمثيرات مجهولة. تقنيات التحكم المتينة الحالية يمكن أن تبقي الطائرات مستقرة، لكنها غالبًا ما تسبب "رعشات" عالية التردد في أوامر المحركات، وتسبب تآكل الأجهزة، وتضمن فقط أن الأخطاء تتناقص تدريجيًا بدلًا من ضمان زوالها في نافذة زمنية قصيرة ومحددة.
طريقة أذكى للموازنة والتكيف
لتجاوز هذه المشكلات، يقدم البحث مخطط تحكم تكيفي مستمر من الرتبة الثانية (ASOCC). ببساطة، ينظر المتحكم ليس فقط إلى مدى ابتعاد حركة الطائرة عن الهدف، بل أيضًا إلى سرعة تغير هذا الخطأ، ويصيغ أوامره بحيث يستقر كلاهما إلى الصفر خلال زمن محدود. يعمل مراقب الاضطراب المدمج كـ"مستمع للضوضاء" في الزمن الحقيقي، مقدراً الأثر الصافي للقوى المجهولة وعدم مطابقة النماذج ويعيد تغذية هذه المعلومات إلى قانون التحكم. والأهم من ذلك، أن المعاملات التي تحدد شدة استجابة المتحكم تُعدل أثناء التشغيل استنادًا إلى هذه التقديرات بدلاً من تثبيتها مسبقًا. وبما أن إشارات التحكم تتغير بسلاسة بدلًا من أن تتبدل فجأة، يقلل التصميم بشكل كبير من الرعشات مع الحفاظ على متانة عالية.
اختبار التحكم الجديد
حلل الباحثون أولاً رياضيات زوج المراقب-المتحكم لديهم وأثبتوا، باستخدام دوال لايابونوف ذات طابع طاقي، أن جميع أخطاء الحركة تتقارب إلى الصفر في زمن محدود بالرغم من الاضطرابات المحدودة. ثم قاموا بمحاكاة سيناريوهات التعلق العدوانية في البرمجيات، معرضين نموذج الطائرة لقوى شبيهة بالرياح، وضوضاء قياس عشوائية، وأخطاء متعمدة في معاييره الفيزيائية. في هذه التجارب، وجه ASOCC الطائرة عبر ثلاث مراحل—التهيئة، والاقتراب، والالتحام—مع الحفاظ على أخطاء الموضع والاتجاه صغيرة ومدخلات التحكم سلسة. وعند المقارنة مع عدة بدائل متقدمة، بما في ذلك المتحكمات بنمط الانزلاق والمتحكمات المبنية على نموذج، خفّضت الطريقة الجديدة مقاييس تتبع رئيسية بحوالي 35–55 في المئة.
من المحاكاة إلى طائرة حقيقية على الجدار
تجاوزًا للمحاكاة، صنع الفريق طائرة رباعية صغيرة ملتصقة باستخدام لوحة طيران تجارية وإطار مطبوع ثلاثي الأبعاد مع ذراع أمامي. في تجارب داخلية، طارت الطائرة تلقائيًا نحو جدار مائل، ارتفعت إلى حوالي متر واحد، ثم انحنت بأنفها لأسفل لتلامس وتبقى ملتصقة. تُظهر بيانات السلاسل الزمنية أن الارتفاع، والموقع الأفقي، وزاوية الميل جميعها تتبع مساراتها المرغوبة عن كثب، مع تموجات طفيفة ناتجة عن ضوضاء الحساسات. على الرغم من العتاد منخفض التكلفة، وتأخيرات الاتصال، وحدود المشغلات، لم ترتد الطائرة أو تتأرجح بعد الصدمة، مما يدل على أن ASOCC يمكنه التعامل مع واقع الطيران الفوضوي.
ماذا يعني هذا لمفتشي الطيران المستقبليين
بالنسبة لغير المتخصصين، النتيجة الأساسية واضحة: يقدم هذا العمل استراتيجية تحكم تسمح للطائرات الصغيرة بالالتصاق بثقة بالأسطح الرأسية والبقاء هناك حتى عندما تكون الظروف غير مثالية. من خلال الجمع بين تحكم سلس لكنه تصحيحي بقوة ومراقب اضطراب تكيفي، تمكّن الطريقة من الالتحام السريع والدقيق دون الارتعاش وإجهاد الأجهزة الذي نراه في العديد من المتحكمات المتينة. يفتح هذا الباب للمراقبة الجوية طويلة المدة ببطاريات أخف ومنصات أبسط ومزيد من الأمان—وهو خطوة مهمة نحو أسراب من الروبوتات الذاتية "الملتَصِقة بالجدران" التي تراقب بهدوء البُنى التحتية والمحاصيل والبيئات الطبيعية.
الاستشهاد: Gupta, S., Nandanwar, A., Dhar, N.K. et al. Perching of quadrotor using adaptive second-order continuous control in the presence of uncertainties. Sci Rep 16, 8578 (2026). https://doi.org/10.1038/s41598-026-36857-9
الكلمات المفتاحية: الالتحام لطائرة رباعية الدوار, التحكم التكيفي, تفتيش الطائرات بدون طيار, مراقب الاضطراب, الروبوتات الجوية