Clear Sky Science · ar
تطوير روبوت رعاية ذكي للمرضى مع ملاحة ذاتية محسّنة من خلال تحسين المسارات في أجنحة المستشفيات
روبوتات تساعد الممرضات، لا تحلّ محلّهن
المستشفيات في جميع أنحاء العالم تحت ضغط متزايد: المزيد من المرضى المسنين، المزيد من الأمراض المزمنة، وطاقم عمل مرهق حتى الحد الأقصى. تصف هذه الدراسة روبوت رعاية ذكي للمريض صُمم ليس للاستيلاء على مهام التمريض، بل للتعامل بهدوء مع المراقبة المتكررة والفحوصات الليلية في أجنحة المستشفى. من خلال الحركة الذاتية الآمنة والموثوقة، يمكن لهذا الروبوت أن يساعد الممرضات على اكتشاف حالات الطوارئ بشكل أسرع — مثل السقوط أو الحُمّى المفاجئة — مع تخفيف عبء العمل وتقليل مخاطر الحوادث في الممرات المزدحمة والأطر الضيِّقة للأبواب.
لماذا الممرات في المستشفيات صعبة على الروبوتات
من النظرة الأولى، يبدو ممر المستشفى بسيطًا: خطوط مستقيمة، أرضيات نظيفة، أبواب منتظمة. لكن بالنسبة للروبوت، الأمر مختلف تمامًا. الأسرة، والعربات، والجدران، وخاصة أطر الأبواب الضيقة تخلق مساحات ضيقة حيث يمكن أن يؤدي خطأ بسيط إلى تصادم. تعتمد العديد من روبوتات المستشفيات الحالية على حزمة من الحساسات والعتاد المعقّد لمواجهة ذلك. سلك الفريق وراء هذه الدراسة طريقًا مختلفًا: هدفهم صنع روبوت يمكنه التحرك بأمان باستخدام حساس رئيسي واحد فقط — ماسح ليزري ثنائي الأبعاد يقيس المسافات حوله — وطريقة أذكى لتخطيط المسارات.

بناء عين إضافية للممرضة
طوّر الباحثون روبوت رعاية ذكي للمريض (SPCR) مبنيًا فوق قاعدة دوّارة تجارية بعجلات. وضعوا على هيكله كاميرا ثلاثية الأبعاد لرصد حالات السقوط وقراءة العلامات الحيوية دون لمس المريض، وحساس ليزر ثنائي الأبعاد في الأعلى يقوم بمسح محيطه بشكل دائري مستمر. في داخل الروبوت يوجد حاسوب مضمّن، وبطاريات، ومتحكمات المحركات، وإلكترونيات اتصال تتيح له التحدث إلى تطبيق تحكم وإدارة قرارات الحركة بنفسه. يستطيع الروبوت الحركة في جميع الاتجاهات، تحريك ذراع الكاميرا للنظر إلى المرضى، وصُمم للعمل لعدة ساعات متواصلة في ظروف مستشفى حقيقية.
خريطة أذكى بدلًا من مزيد من العتاد
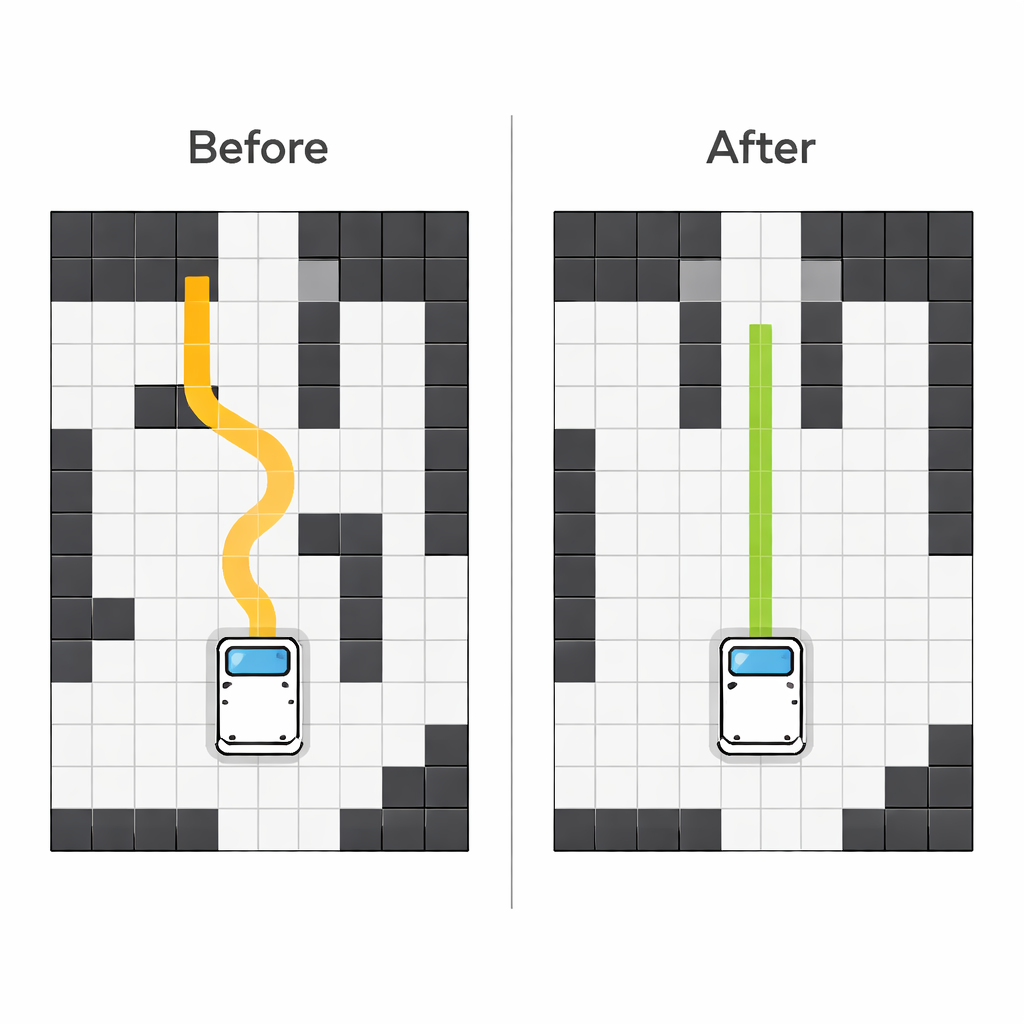
للتنقل، يحتاج الروبوت أولًا إلى خريطة تحدد أين يمكنه وأين لا يمكنه الذهاب. بدأ الفريق من رسومات دقيقة لممر المستشفى وحولها إلى خريطة بنمط شبكي، حيث تُصنَّف كل خلية صغيرة على أنها مساحة حرة، أو جدار، أو عقبة. بدل ترك الخريطة كما هي، أعادوا تشكيلها لتكون أكثر حذرًا من الواقع. أدخلوا "مساحات عقبات افتراضية" — مناطق إضافية محظورة تدفع الروبوت بلطف بعيدًا عن الأماكن الخطرة مثل حواف الأبواب والزوايا الضيقة. ثم يبحث برنامج تخطيط المسار، المبني على نسخة محسّنة من خوارزمية D* Lite، في هذه الخريطة الأكثر أمانًا عن مسارات تتجنب المنعطفات الحادة وتحافظ على الروبوت أقرب إلى وسط الممرات الضيقة.
اختبار الروبوت في أجنحة حقيقية
اختُبر النظام في ممر مستشفى فعلي مقسّم إلى ثلاثة مقاطع ذات توليفات مختلفة من الممرات والأبواب والعقبات. كان على الروبوت التنقل بين نقاط فحص، المرور عبر أبواب قياسية بعرض 90 سنتيمترًا، وتجنّب الجدران والأجسام الثابتة. وبما أن عرض الروبوت نفسه حوالي 76 سنتيمترًا، كان لديه بضع سنتيمترات فقط من الخلوص على كل جانب عند المرور عبر الأبواب — ظروف تكافح فيها العديد من الروبوتات. بمقارنة الأداء قبل وبعد تعديل الخريطة الشبكية، وجد الباحثون أن نسبة نجاح الروبوت في إكمال مساراته دون ملامسة أي شيء قفزت بأكثر من 30 بالمئة في جميع المقاطع، مع مسارات أكثر سلاسة ومناورات أقل غير ضرورية.
ما معنى هذا لرعاية المرضى في المستقبل
للغير متخصصين، الرسالة الرئيسية بسيطة: بدلًا من تحميل الروبوتات بمزيد من الحساسات، تُظهر هذه الدراسة أن تصميم الخرائط الرقمية بعناية وتخطيط المسارات بشكل أذكى يمكن أن يجعل روبوتات المستشفيات أكثر أمانًا وعملية. روبوت قادر على الانزلاق بثبات عبر الأبواب الضيقة ليلاً، اتباع مسارات فعّالة، وفحص العلامات الأساسية للمرضى بهدوء يمكن أن يحرّر الممرضات لتركيز على الرعاية الإنسانية — مواساة العائلات، اتخاذ القرارات المعقّدة، والتعامل مع الطوارئ. يرى المؤلفون هذا العمل كأساس: ستضيف النسخ المستقبلية مزيدًا من الحساسات وميزات أغنى لمراقبة المرضى، مستهدفة مساعدين روبوتيين موثوقين يعملون على مدار الساعة ويتحركون بأمان في بيئات المستشفيات الحقيقية.
الاستشهاد: Kim, B., Hyun, J., Yang, B. et al. Development of smart patient care robot with enhanced autonomous navigation through path optimization in hospital wards. Sci Rep 16, 6026 (2026). https://doi.org/10.1038/s41598-026-36664-2
الكلمات المفتاحية: روبوتات المستشفيات, الملاحة الذاتية, مراقبة المرضى, رسم خرائط LiDAR, تخطيط المسار