على قاع البحر، تعمل المركبات الذاتية المائية كعُيوننا وآذاننا لأبحاث المناخ، وفحص البُنى التحتية، وعمليات البحث والإنقاذ. ومع ذلك، تواجه هذه الغواصات الروبوتية مشكلة أساسية: التواصل والتفكير بوضوح في بيئة قاسية حيث الإشارات بطيئة، وصاخبة، والطاقة محدودة. تُقدِّم هذه الورقة وسيلة جديدة لمساعدة الروبوتات تحت الماء على التواصل، ورصد الأشياء، والحفاظ على الأمان من خلال الجمع بين الواقع المعزَّز والافتراضي وفرع من فروع الذكاء الاصطناعي يُسمَّى تعلُّم التعزيز.
لماذا الاتصالات تحت الماء صعبة للغاية
إرسال البيانات تحت الماء أصعب بكثير من إرسالها في الهواء. تمتص موجات الراديو، التي تُشغِّل شبكات الواي‑فاي و5G، بسرعة في مياه البحر. تنتقل الإشارات الصوتية (المعتمدة على الصوت) لمسافات أبعد لكنها توفر معدلات نقل بيانات منخفضة جداً، ويمكن أن تتأخر أو تتكرر أو تتشوَّه. يعمل التحريض المغناطيسي فقط على مدى عشرات الأمتار. غالباً ما تتعامل أنظمة التحكم الحالية للمركبات تحت الماء مع هذه القنوات بشكل منفصل وتستخدم قواعد ثابتة للملاحة والتحسّس. هذا يجعلها بطيئة في التكيّف عند تغير الظروف، ويهدر طاقة البطارية، ويترك روابط الاتصال عرضة للتنصت أو الهجوم.
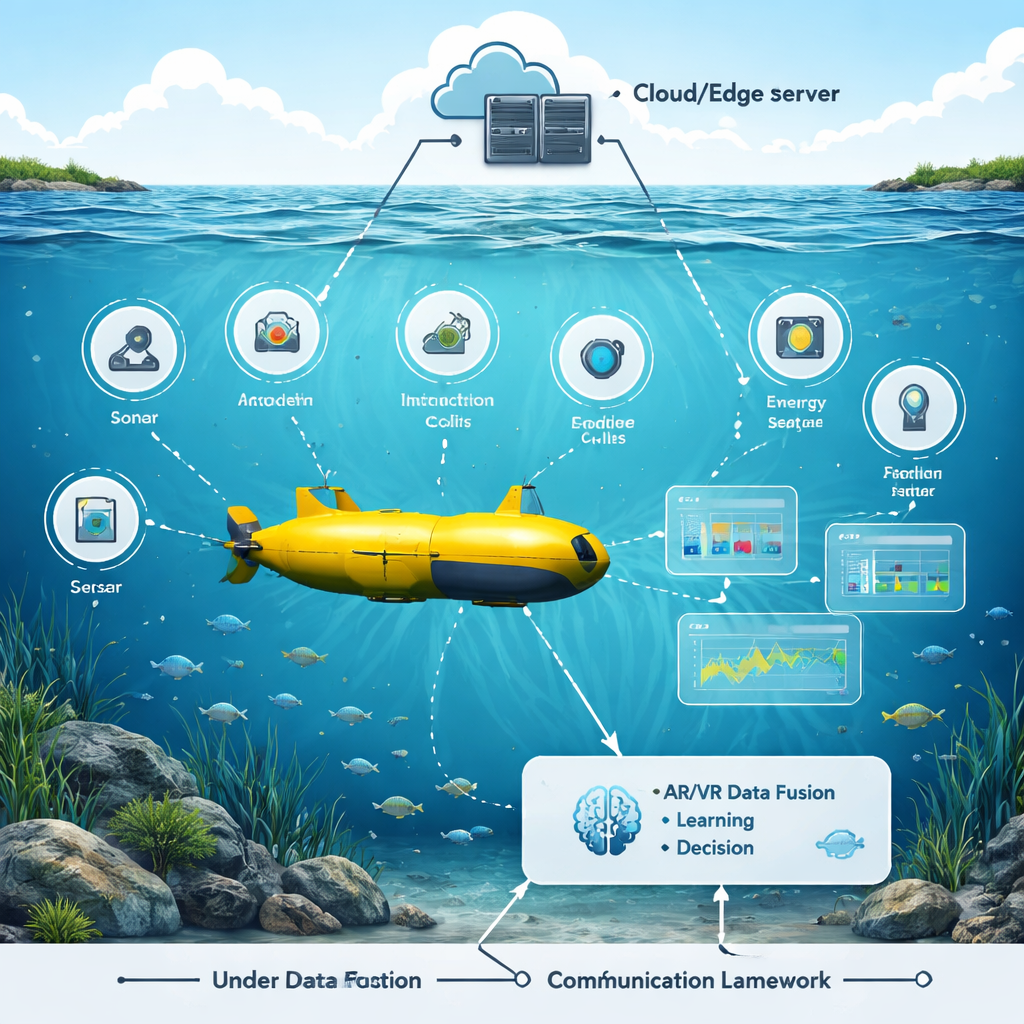
محيط افتراضي لتدريب الغرائز بشكل أفضل Figure 1.
بنَى المؤلفون مختبراً واقعياً معززاً وافتراضياً يعيد خلق عالم بحري مزدحم: أسماك متحركة، وصخور، وقوارب وعوامات، إلى جانب ضوضاء وفقدان إشارة واقعيين في الماء. تبحر مركبة تحت مائية محاكاة عبر هذا المحيط مستخدمة العديد من المستشعرات—سونار، وكاميرات، ومودمات صوتية، وعدادات طاقة، وأجهزة تتبّع الموقع. في المشهد الافتراضي، يمكن للباحثين تحريك عناصر تحكم لتغيير مواقع الأشياء، وظروف المياه، وإعدادات المستشعرات، وملاحظة استجابة الروبوت فوراً. هذه الطبقة من الواقع المعزَّز/الافتراضي ليست مجرد زخرفة بصرية؛ فهي تدمج مُخرَجات المستشعر الخام في صورة ثلاثية الأبعاد موحّدة أسهل على نظام الذكاء الاصطناعي أن يفهمها ويتصرف بناءً عليها.
تعلّيم الروبوت التعلم من التجربة
في صميم الإطار توجد استراتيجية ذكاء اصطناعي يسميها المؤلفون استراتيجية الجدولة التكيفية للواقع المعزَّز وتعلُّم التعزيز (AARLSS). بدلاً من اتباع سيناريو ثابت، يتعلم الروبوت عن طريق المحاولة والخطأ في المحيط الافتراضي. في كل لحظة، يراقب حالة المستشعر المندمجة، ويختار إجراءً (مثل تغيير المسار، تعديل معدل أخذ عينات المستشعر، أو التبديل بين الاتصالات قصيرة وبعيدة المدى)، ويتلقى مكافأة. توازن تلك المكافأة بين أربعة أهداف: حفظ الطاقة، وتقليل التأخير، وخفض مخاطر الأمان، وتقليل الموارد الحاسوبية والشبكية المستخدمة. يخزن شبكة تعلم Q العميقة ويحدّث القيمة المتوقعة لقرارات مختلفة، مستخدماً دفعات صغيرة من الخبرات الماضية المحفوظة في ذاكرة إعادة التشغيل حتى يتعلم الروبوت من الحالات الحديثة والقديمة على حد سواء.
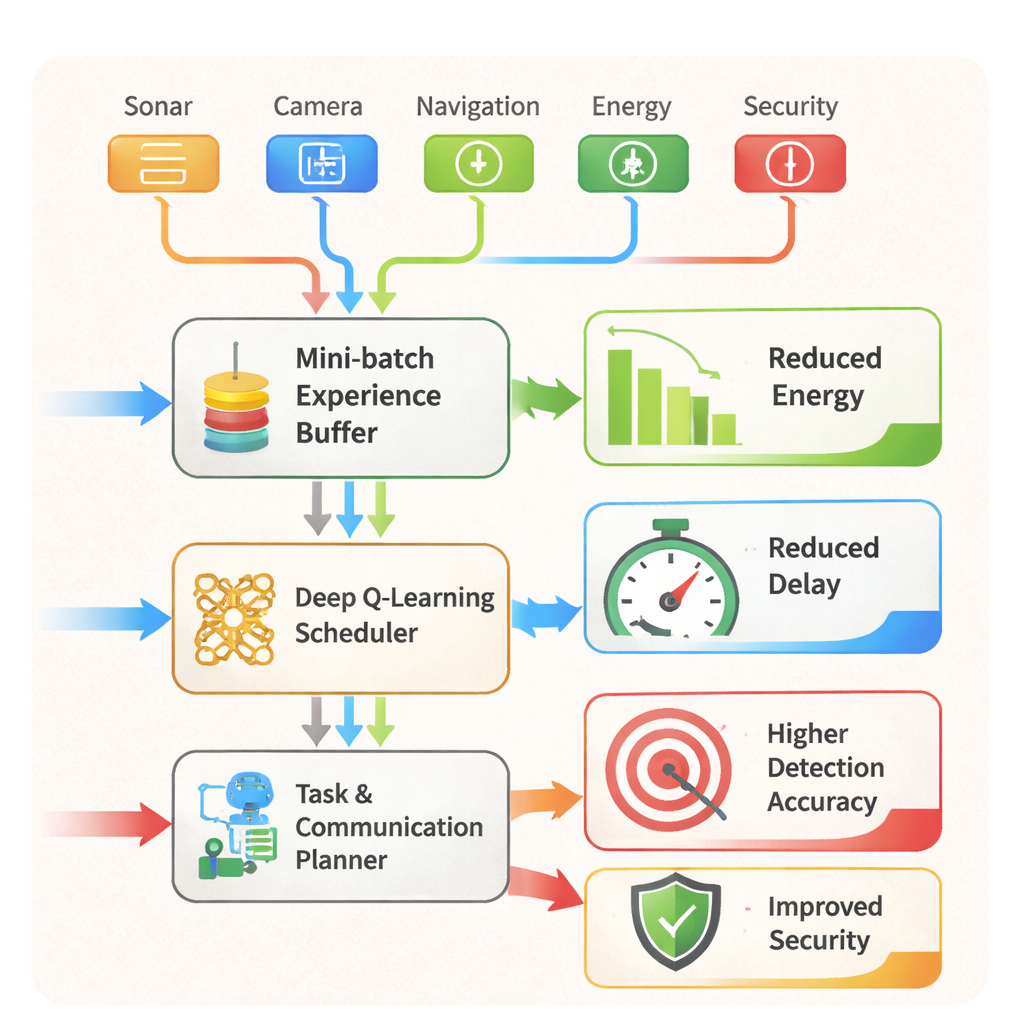
من الجدولة الذكية إلى مهمات أكثر أماناً Figure 2.
تعمل AARLSS أيضاً كجدولة في الوقت الفعلي. تقرر أي المهام—الملاحة، كشف الأشياء، الاتصال، أو فحوصات الأمان—ينبغي تشغيلها أين ومتى، وما إذا كان يجب معالجة البيانات على متن الروبوت، أو تفريغها إلى خادم حافة، أو تأجيلها. بالإضافة إلى ذلك، يفحص نظام لاختراق مدمج أنماط بيانات المستشعر والشبكة باستمرار لتمييز الشوائب التي قد تُشير إلى هجوم أو عطل، ويمكنه تفعيل إجراءات حماية مثل حظر الروابط الخطرة أو إجبار الحوسبة محلياً فقط. في اختبارات داخل المحاكي AR/VR، تفوَّق الإطار على عدة طرق معروفة لتعلُّم التعزيز. خفّض استهلاك الطاقة للمركبة تحت الماء بنحو 20%، وقلل تأخيرات الاتصال والمهام بحوالي 18–20%، ورفع دقة كشف الأشياء إلى نحو 97–98%، حتى أثناء المناورات المعقَّدة وفي المشاهد المزدحمة.
ماذا يعني هذا لمحيطات العالم الواقعية
بالنسبة لغير المتخصصين، الرسالة الأساسية هي أن هذا البحث يشير إلى روبوتات تحت الماء أكثر استقلالية وكفاءة وموثوقية. من خلال التدريب في محيط افتراضي غني وتعلُّم الموازنة بين الطاقة والوقت والدقة والأمان في آن واحد، تتيح AARLSS للمركبة أن تختار متى تتكلَّم، ومتى تستمع، ومتى تبقى صامتة لتوفير الطاقة—مع الحفاظ في الوقت نفسه على مراقبة حادة للمحيط وحماية بياناتها. وعلى الرغم من أن هذه النتائج مأخوذة من محاكي متطور وليس من مياه مفتوحة، فإنها توحي بأن أساطيل مستقبلية من الروبوتات تحت الماء قد تُنجز مهمات أطول وأكثر أماناً وغنية بالبيانات مع إشراف بشري أقل، مما يحسن كل شيء من علوم المحيطات إلى فحوصات المنشآت البحرية.
الاستشهاد: Lakhan, A., Mohammed, M.A., Ghani, M.K.A. et al. A novel augmented reality and reinforcement learning empowered communication framework for underwater unmanned autonomous vehicle.
Sci Rep16, 6241 (2026). https://doi.org/10.1038/s41598-026-36647-3
الكلمات المفتاحية: روبوتات تحت الماء, مركبات تحت الماء ذاتية القيادة, تعلُّم التعزيز, الواقع المعزَّز, الاتصالات تحت الماء