Clear Sky Science · ar
شبكة تعاون متعددة الانتباه للكشف في الوقت الحقيقي عن الأشياء الصغيرة في صور الطائرات بدون طيار
لماذا يهم رصد التفاصيل الصغيرة من السماء
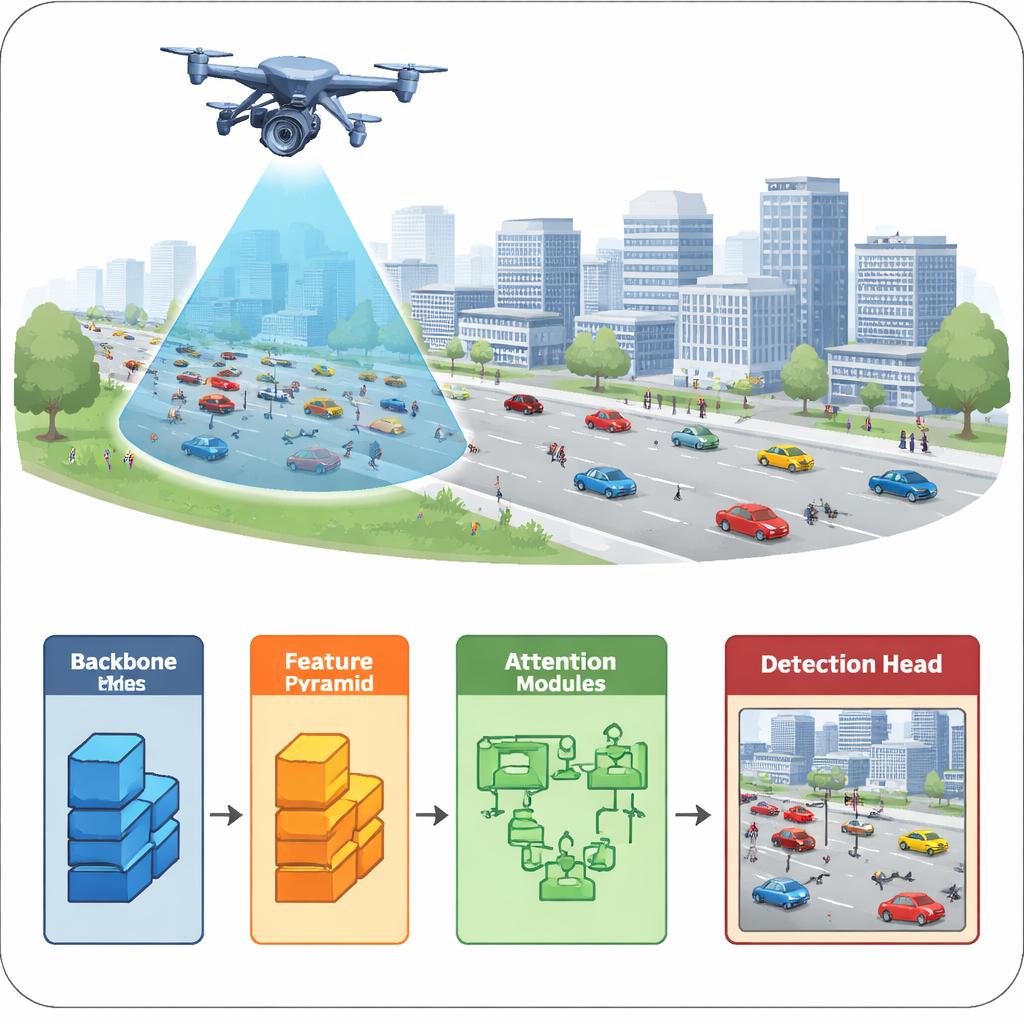
مع انتشار الطائرات بدون طيار كأدوات لمراقبة المرور والاستجابة للكوارث والأمن، يجب أن تكون قادرة على رصد كائنات صغيرة جداً—مثل السيارات والدراجات والأشخاص—عندما تُرى من ارتفاع كبير. في هذه المشاهد الجوية، تكون الأهداف بعرض بضعة بكسلات فقط، مما يجعلها عرضة للضياع بين الظلال والوهج والخلفيات المزدحمة. تعرض هذه الورقة نظام رؤية حاسوبية جديدًا يُدعى شبكة التعاون متعددة الانتباه (CMA-Net)، مصممًا لاكتشاف مثل هذه الأشياء الصغيرة في صور الطائرات بدون طيار بسرعة ودقة تكفي للاستخدام في الوقت الحقيقي.
تحديات رؤية الأشياء الصغيرة من ارتفاع كبير
يعد كشف الأشياء الصغيرة في صور الطائرات بدون طيار أصعب من الصور العادية في الشوارع. لأن الطائرات تحلق على ارتفاعات عالية وتصور المشاهد من زوايا متعددة، تبدو المركبات والأشخاص صغيرة ومشوشة، ويمكن أن يتغير الإضاءة بسرعة. يمكن لأنظمة الكشف ذات المرحلتين التقليدية أن تكون دقيقة جدًا لكنها غالبًا ما تكون بطيئة جدًا للاستخدام في الوقت الحقيقي على منصات طائرة ذات قدرة حوسبية وعرض نطاق اتصال محدودين. تعمل الأساليب أحادية المرحلة الأسرع في الوقت الحقيقي لكنها تميل إلى تفويت الأهداف الصغيرة لأن تفاصيلها تتلاشى تدريجيًا أثناء معالجة الصورة طبقة تلو الأخرى. يجادل المؤلفون بأن تحسين كشف الأشياء الصغيرة يتطلب طرقًا أذكى لدمج المعلومات عبر المقاييس وتركيز الانتباه الحاسوبي على أكثر أجزاء الصورة معلوماتية.
بناء سلم ميزات أذكى
تبدأ CMA-Net من هيكل ظهر شائع لمعالجة الصور، ResNet-50، ثم تضيف شبكة هرميّة للميزات ثنائية الاتجاه فعّالة (E-BiFPN). يبني هذا البناء نوعًا من السلم لخرائط الميزات بأحجام مختلفة، مما يسمح للنظام بمزج التفاصيل الدقيقة من الطبقات المبكرة مع السياق الأكثر تجريدًا من الطبقات الأعمق. على عكس التصاميم السابقة، تقلل E-BiFPN من الطبقات العليا غير الضرورية وتضيف كتلة معالجة خفيفة خاصة تستخدم الالتفافات الجزئية لتقليل الحمل الحسابي. ثم يتعلم مخطط دمج مرجّح مقدار الثقة في الميزات السطحية مقابل العميقة على كل مقياس، بحيث يتم تعزيز المعلومات الضعيفة عن السيارات أو المشاة الصغار بينما يُقلل الضجيج من الخلفية.
تعليم الشبكة أين تنظر
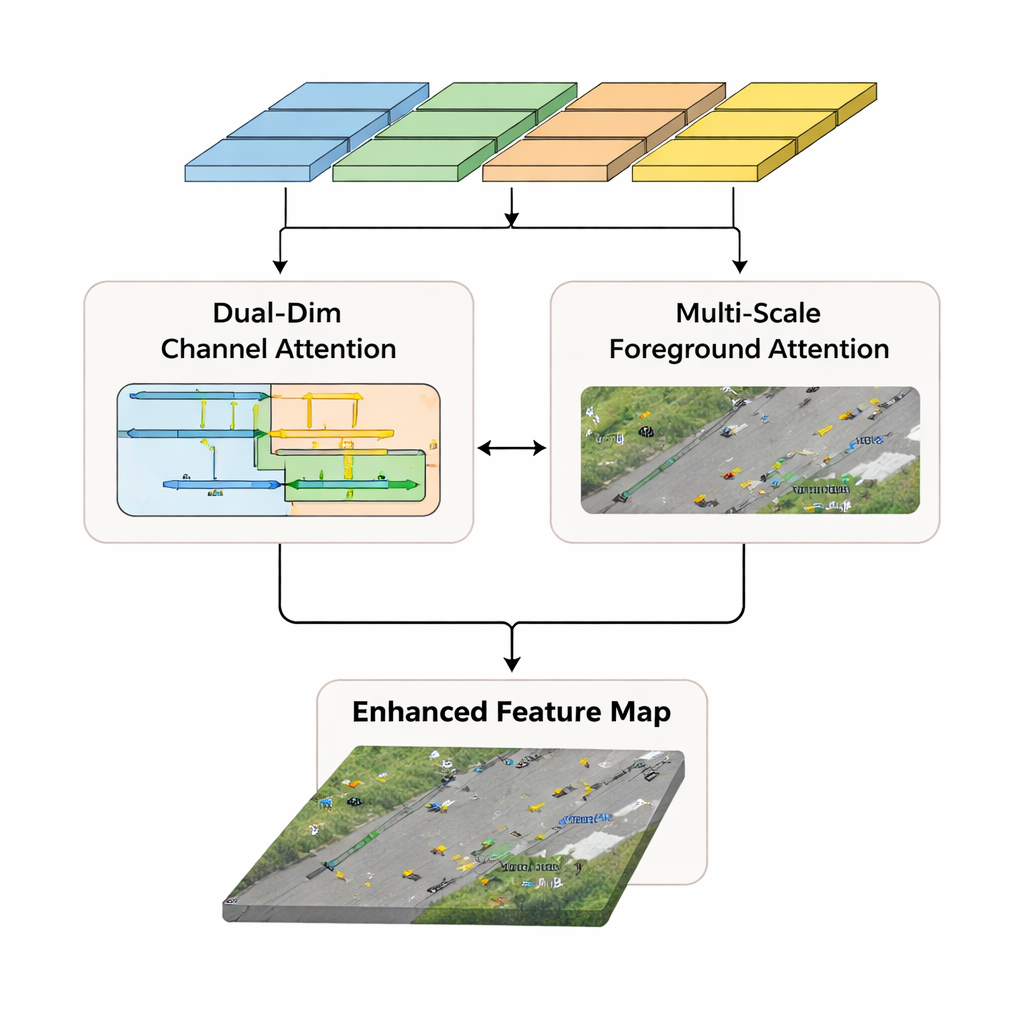
بعيدًا عن إعادة ترتيب الميزات، تستخدم CMA-Net آليات انتباه تحاكي كيفية تركيز البشر على أجزاء المشهد ذات الصلة. يحلل مكوّن الانتباه الثنائي البُعد للقنوات (DDCA) الميزات بشكل منفصل على طول العرض والارتفاع للصورة، بدلاً من ضغط كل شيء إلى ملخص عالمي واحد. يساعد هذا التصميم الشبكة على التقاط أنماط طويلة المدى في الاتجاهين الأفقي والعمودي، محافظًا على إشارات الموقع الضرورية عندما تمتزج الأجسام الصغيرة مع محيط معقّد. بالتوازي، يربط مكوّن الانتباه للمقدمة متعدد المقاييس (MSFA) بين الأجسام الكبيرة سهلة التعرف في الطبقات العميقة وتلك الصغيرة في الطبقات السطحية. من خلال أخذ عينات ودمج المعلومات من ثلاث مقاييس، يتعلم MSFA إبراز مناطق المقدمة حيث من المحتمل وجود المركبات وكبت القوام الخلفي المربك.
من الميزات المحسّنة إلى قرارات سريعة
تُدمج مخارج فرعي DDCA وMSFA في خرائط ميزات غنية ومناسبة للأشياء الصغيرة تُمرَّر إلى رأس كشف «خالي من المراسي». بدلًا من الاعتماد على شبكة كثيفة من الصناديق المسبقة الإعداد، يتنبأ هذا الرأس مباشرةً بفئة وموقع الكائنات، مبسّطًا الحسابات وجاعلًا التدريب أكثر مرونة. قيّم المؤلفون CMA-Net على مجموعتي بيانات عامتين ومطالبتين للطائرات بدون طيار، UAVDT وStanford Drone، اللتين تتضمنان طرقًا مزدحمة وظروف طقس متنوعة وحالات نهار–ليل. حققت CMA-Net درجات دقة بلغت 67.2% و62.0% على هذه المجموعات بينما تعمل بمعدل 64 إطارًا في الثانية، ما يعني أنها قادرة على معالجة الفيديو في الوقت الحقيقي مع تفوقها على العديد من الكواشف الشهيرة، بما في ذلك بعض نماذج عائلة YOLO ونماذج أكثر تعقيدًا قائمة على المحولات.
ماذا يعني ذلك لاستخدام الطائرات بدون طيار في العالم الواقعي
بالنسبة لغير المتخصصين، الخلاصة أن CMA-Net تحسّن بشكل ملحوظ قدرة الطائرة بدون طيار على ملاحظة الأشياء الصغيرة والصعبة الرؤيا دون إبطاء أدائها. من خلال دمج المعلومات عبر مقاييس متعددة وتوجيه انتباه الشبكة عبر قنوات الصورة وبين المقدمة والخلفية، يمنع الأسلوب تجاهل المركبات والأشخاص الصغار. تجعل هذه التركيبة من الدقة والسرعة النهج واعدًا للتطبيقات العملية مثل مراقبة المرور الذكية، وملاحظة الحشود، والاستجابة للطوارئ، حيث قد يكون فقدان كائن صغير أو رد الفعل البطيء له عواقب خطيرة.
الاستشهاد: Yang, J., Yue, X. & Wu, L. A collaborative multi-attention network for real-time small object detection in UAV imagery. Sci Rep 16, 5852 (2026). https://doi.org/10.1038/s41598-026-36440-2
الكلمات المفتاحية: رؤية الطائرات بدون طيار, كشف الأشياء الصغيرة, المراقبة في الوقت الحقيقي, شبكات الانتباه, مراقبة المرور