Clear Sky Science · ar
قرار هرمي لاختيار أفضل منظر قائم على المعلومات المتبادلة لـ NBV من أجل SLAM بصري دلالي نشط في بيئات ديناميكية
روبوتات قادرة على التفكير المسبق
مع انتقال الروبوتات من المصانع إلى المنازل والمستشفيات والمكاتب، ينبغي عليها التنقل في فضاءات يملؤها الناس والأجسام المتحركة الأخرى. تعرض هذه الورقة طريقة جديدة لتمكين الروبوت من «التفكير المسبق» بشأن مكان النظر وكيفية الحركة حتى يتمكن من بناء خريطة موثوقة لمحيطه — حتى عندما يرفض هذا المحيط الثبات. يهم هذا العمل كل من يهتم بروبوتات خدمة أكثر أمانًا، أو روبوتات توصيل أذكى، أو مساعدين منزليين مستقبليين يتعين عليهم مشاركة المساحة مع البشر بدلاً من الممرات الفارغة.
لماذا تُربك الحركة البشر الروبوتات
لتتحرك بمفردها، يستخدم كثير من الروبوتات تقنية تسمى SLAM بصري، حيث تساعد الكاميرا على بناء خريطة وتقدير موضع الروبوت في الوقت نفسه. تعمل هذه التقنية جيدًا في بيئات ثابتة لكنها تنهار بسرعة عندما يمر الناس، أو يحجبون المشهد، أو يحملون أشياء. أحد الحلول الشائعة هو استخدام رؤية «دلالية» بحيث يتعرف الروبوت على الأشخاص والسيارات والكراسي ويتجاهلها عند بناء الخريطة. ومع ذلك، يخلق هذا مشكلة جديدة للروبوتات النشطة التي تختار مساراتها بنفسها: إذا تخلصت من الكثير من الدلائل البصرية، فقد تفقد تتبُع موقعها بالكامل. ويجعل ذلك مجال رؤية الكاميرا المحدود أصعب، لأن شخصًا واحدًا يمر بالقرب قد يخفي معظم المشهد المفيد من عيون الروبوت.
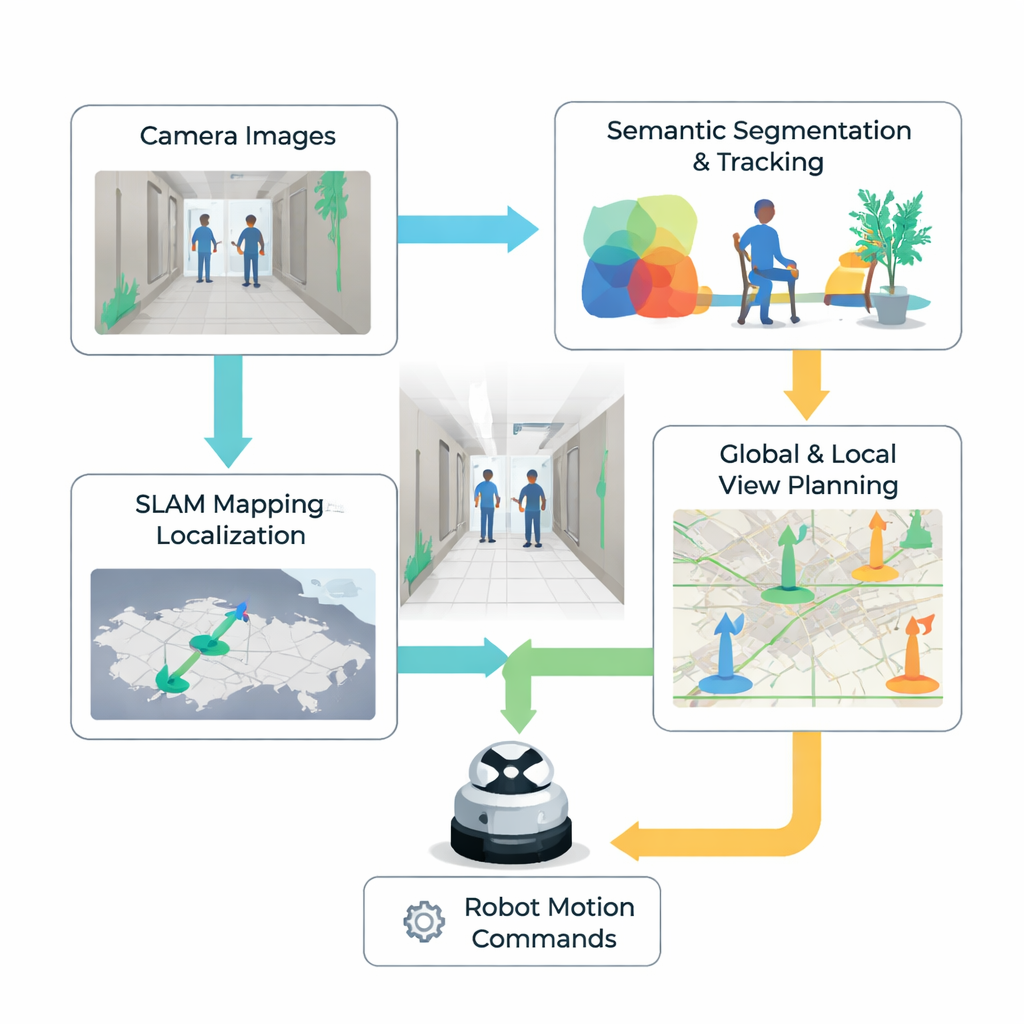
استراتيجية ذات مستويين لاختيار مكان النظر التالي
يقترح المؤلفون نظام قرار هرمي يساعد الروبوت على تحديد وجهات نظره التالية بطريقة أكثر استنارة. على المستوى الأعلى، يحتفظ الروبوت بخريطة شبكية من منظور عين الطائر للمناطق الحرة والمشغولة والمجهولة. يقَيِّم وجهات النظر البعيدة المحتملة بتقدير مقدار تقليل عدم اليقين في هذه الخريطة، وهو مفهوم مستعار من نظرية المعلومات. يفضّل الروبوت المواقع التي تكشف عن مناطق غير مستكشفة واسعة مع مراعاة المسافة التي يجب أن يقطعها ومقدار دوران الكاميرا المطلوب. بمجرد اختيار منطقة واعدة، يتولى مستوى أدنى ضبط كيفية تحرك الروبوت واتجاهه داخل تلك الحيّز بحيث يستطيع بالفعل رؤية تفاصيل مفيدة كافية من خلال مجال رؤية كاميرته الضيق.
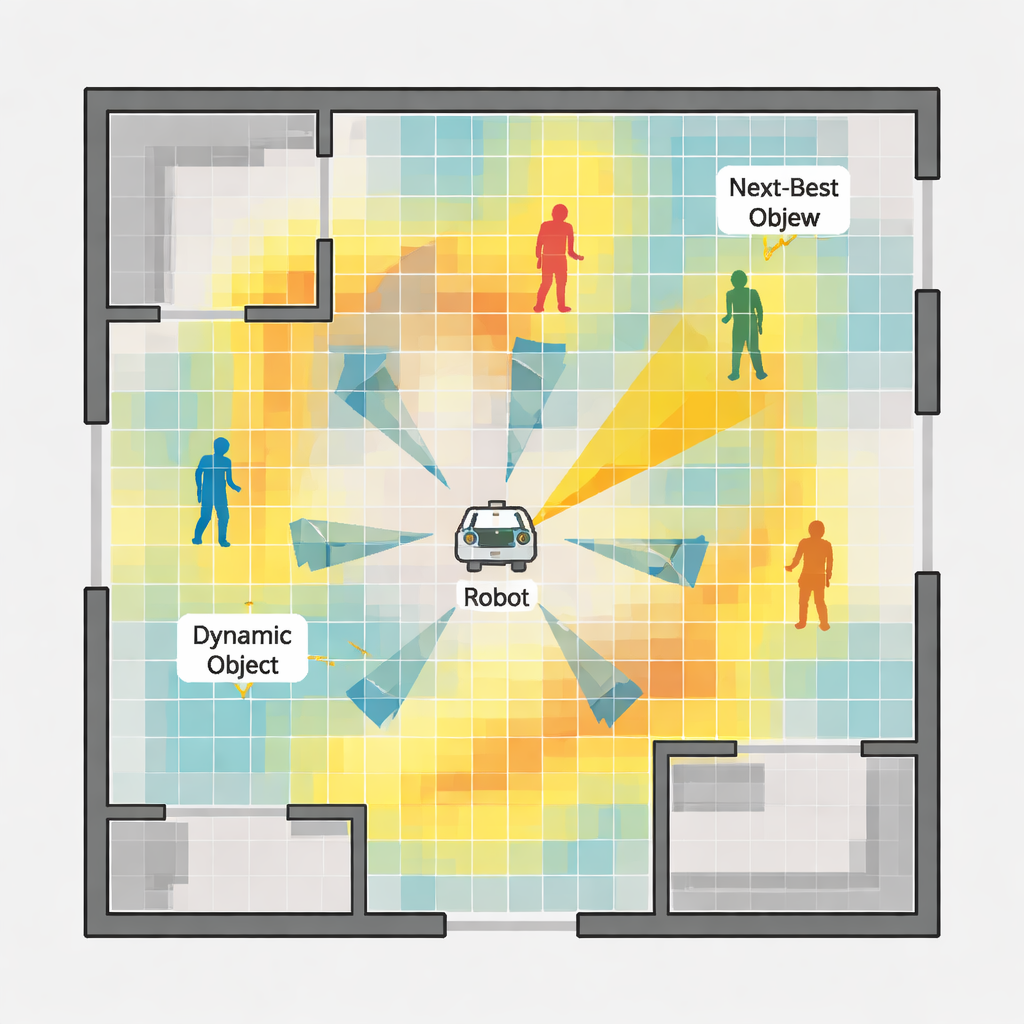
رؤية ما هو ثابت وتفادي ما ليس كذلك
في قلب عملية القرار المحلية توجد «خريطة احتمالية الميزات» تُبنى من كل صورة كاميرا. أولاً، يكتشف النظام معالم بصرية — زوايا ونماذج في المشهد — من المرجح أن تظل ثابتة مع مرور الزمن وتكون مفيدة لتتبع الحركة. ثم يستخدم كاشف كائنات حديثًا لاكتشاف الأجسام المحتملة الحركة، مثل الأشخاص، ويتتبعها عبر الإطارات. من خلال تحليل كيفية تحرك هذه الأجسام، يقدّر النظام ليس فقط مكانها الآن، بل أين من المحتمل أن تكون في المستقبل القريب. تُدمج هاتان المَصدران للمعلومات في خريطة حرارية فوق الصورة: تشير المناطق الساطعة إلى احتمال عالٍ لرؤية معالم موثوقة، بينما تميّن المناطق الداكنة أماكن فقيرة بالميزات أو يحتمل أن تُغطى بأجسام متحركة. يستخدم الروبوت هذه الخريطة ليقدّر أي حركة صغيرة — الالتفاف لليسار أو اليمين أو التقدم إلى الأمام — ستمنحه العرض الأكثر وضوحًا وثباتًا لاحقًا.
الاختبار في عوالم افتراضية والحقيقية
اختبر الباحثون منهجهم في مساحتين داخليتين محاكاتين مختلفتين من حيث الحجم والتعقيد، كلٌّ منهما مليئة بمشاة افتراضيين متجولين، ثم على روبوت فعلي يقود داخل بيئة داخلية حقيقية. قارنوا طريقتهم بعدة استراتيجيات استكشاف معروفة تهدف أساسًا إلى تغطية المساحة أو تقصير مسافة السفر. في المحاكاة، أنتج النظام الجديد خرائط بتشوه أقل وحقق دقة تموضع أفضل أثناء الاستكشاف في وقت مماثل أو أقل تقريبًا. كما كان أقل عرضة لفقدان تتبعه للموقع أو الاقتراب المزعج من الأشخاص المتحركين. في تجربة العالم الحقيقي، عملت الطريقة في الزمن الحقيقي على كمبيوتر روبوت جاهز من السوق، مما يؤكد قابلية تطبيقها خارج المختبر.
ماذا يعني هذا لروبوتات الحياة اليومية
بعبارات بسيطة، يعلم هذا العمل الروبوت أن يكون انتقائيًا بشأن مكان النظر وإلى أين يذهب عندما يكون الناس من حوله. من خلال دمج فهم المشهد، وتنبؤ الحركة، ومقياس كسب المعلومات، يستطيع الروبوت توجيه نفسه نحو مناظِر تكون مفيدة وآمنة في آن واحد، بدلًا من التقدم ببساطة نحو أقرب ركن غير مستكشف. هذا يجعل خريطته الداخلية أكثر موثوقية وحركاته أكثر قابلية للتوقع، وهي مكونات أساسية للروبوتات التي يجب أن تشارك المساحات المزدحمة مع البشر. لا تزال بعض التحديات قائمة — مثل انتشار حشود كبيرة مفاجئة تحجب الكاميرا — لكن النهج يمثل خطوة نحو روبوتات منزلية وخدمية قادرة على التعامل بمرونة مع الطبيعة الفوضوية والديناميكية للحياة الحقيقية.
الاستشهاد: Yang, Z., Sang, A.W.Y., Muthugala, M.A.V.J. et al. Mutual information-based hierarchical NBV decision for active semantic visual SLAM under dynamic environments. Sci Rep 16, 5847 (2026). https://doi.org/10.1038/s41598-026-36259-x
الكلمات المفتاحية: SLAM نشط, ملاحة الروبوت, بيئات ديناميكية, التخطيط الدلالي, أفضل منظر تالٍ