Clear Sky Science · ar
خوارزمية مشتركة لتقدير المدى-الزاوية-السرعة لرادار FDA-MIMO تعتمد على معالجة الإشارات على الرسوم البيانية
رادارات أكثر ذكاءً لعالم مزدحم ومشوش
من السيارات ذاتية القيادة إلى مراقبة الطائرات، تعتمد المجتمعات الحديثة اعتمادًا كبيرًا على أنظمة الرادار القادرة على اكتشاف وتتبع الأجسام بسرعة وبشكل موثوق. ومع تزايد الازدحام في السماء والطرق والموجات الكهرومغناطيسية، يحتاج الرادار إلى تمييز عدة أهداف متحركة في ظل تداخل وضوضاء قوية. يقدم هذا البحث نهجًا جديدًا لجعل فئة قوية من الرادارات—المعروفة برادارات FDA-MIMO—ترى بوضوح أكبر في ثلاثة أبعاد (المسافة والاتجاه والسرعة) عن طريق استعارة أدوات من مجال ناشئ يعرف بمعالجة الإشارات على الرسوم البيانية.
لماذا تهم هذه البنية الجديدة للرادار
توجه رادارات المصفوفات الموجهة التقليدية شعاعها أساسًا عبر الزاوية، مثل تحريك مصباح يدوي لليسار واليمين. تعمل رادارات المصفوفة بتغيير التردد (Frequency Diverse Array أو FDA) بشكل مختلف: يرسل كل عنصر هوائي بتردد قليل الاختلاف عن الآخرين. هذا الاختلاف الصغير يجعل نمط الشعاع يعتمد ليس فقط على الزاوية، بل أيضًا على المسافة والزمن. عندما تُدمج هذه الفكرة مع تقنيات الإدخال المتعدد-الإخراج المتعدد (MIMO)، يمكن لرادارات FDA-MIMO، من حيث المبدأ، تحديد موضع الهدف في ثلاثة أبعاد: مدى بعده، موقعه بالزاوية، ومدى سرعته. التحدي يكمن في استخراج كل تلك المعلومات بسرعة ودقة من الإنعكاسات الخام، خاصةً عند وجود أهداف متعددة وإشارات مدفونة في الضوضاء.
تحويل أصداء الرادار إلى مسألة شبكية
يتعامل المؤلفون مع هذا التحدي بإعادة تصور قياسات الرادار كإشارات تعيش على رسم بياني—شبكة من العقد والروابط. تمثل كل عقدة في هذا الرسم زوج إرسال–استقبال معين في مصفوفة FDA-MIMO، وتلتقط الروابط كيف ترتبط الإشارات في العقد المجاورة مكانيًا. من خلال تعريف هذه الاتصالات بعناية، يبنون "مصفوفة الجوار" التي تصف كيف ينبغي أن تنتشر الإنعكاسات عبر المصفوفة إذا كان الهدف عند مسافة وزاوية معينتين. عندما يتطابق زوج المسافة–الزاوية المفترض مع الهدف الحقيقي، يتطابق نمط الإنعكاس المقاس تقريبًا مع أحد أوضاع الاهتزاز الطبيعية للرسم البياني. عمليًا، يعني هذا أنه بعد تطبيق نسخة قائمة على الرسم البياني من تحويل فورييه، تنهار الطاقة إلى قمة حادة عند مركب طيفي واحد. تبحث الخوارزمية عن مثل هذه القمم عبر شبكة من قيم المسافة والزاوية لتحدد مواقع الأهداف. 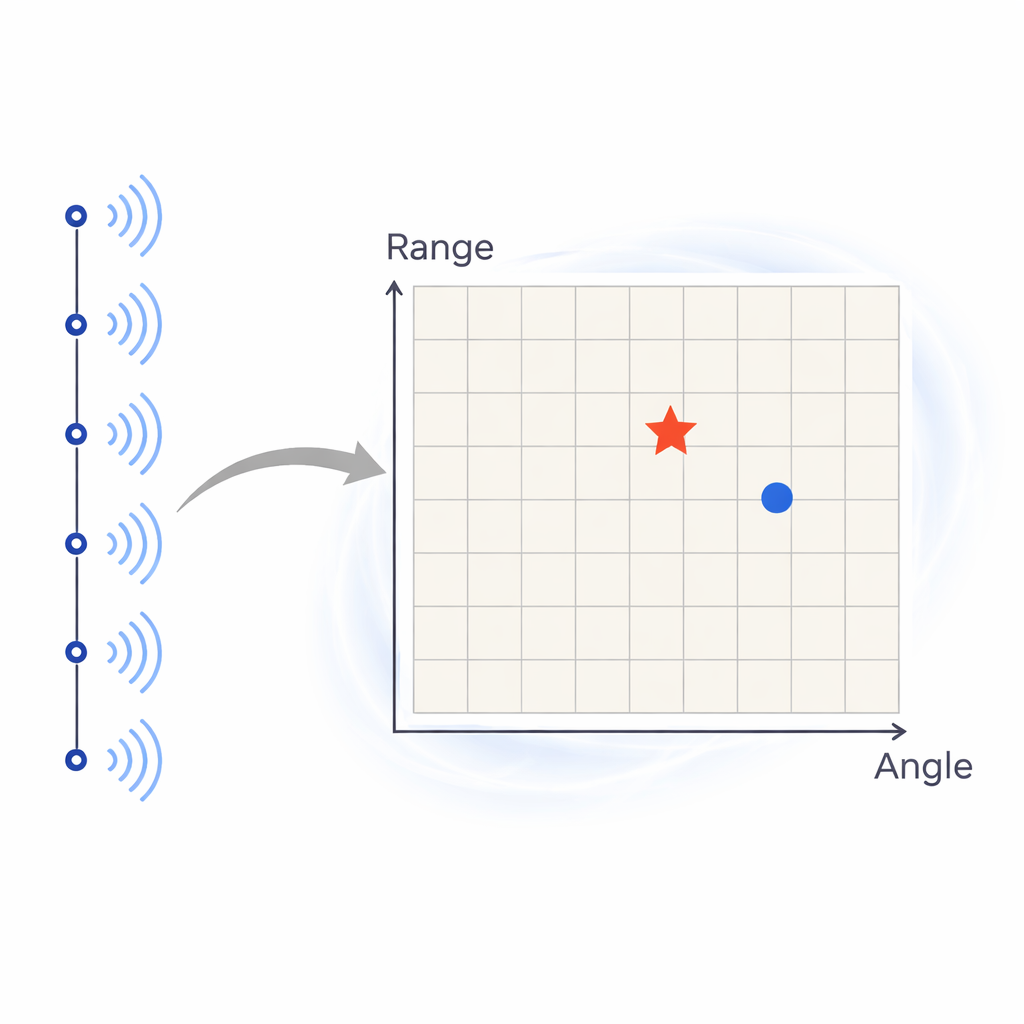
إضافة الحركة: قياس السرعة بنفس الفكرة
لتقدير سرعة الهدف، تمتد الطريقة بمفهوم الرسم البياني إلى بعد الزمن، عبر نبضات رادار متعددة. الآن تمثل كل عقدة نَبضة زمنية، وتربط الروابط بين النبضات المجاورة في حلقة لالتقاط كيفية تطور الإشارة إذا كان للهدف سرعة شعاعية معينة. مرة أخرى، عندما تتطابق السرعة المفترضة مع السرعة الحقيقية، يظهر الإشارة المحولة ذروة مركزة في المجال الطيفي للرسم البياني. تمسح الخوارزمية عبر سرعات مرشحة بحثًا عن المكان الذي تكون فيه هذه الذروة الأقوى. والأهم أن المؤلفين صمموا إطارهم بحيث تُعزِّز تقديرات المسافة–الزاوية من الرسم البياني المكاني وتقديرات السرعة من الرسم البياني الزمني بعضها البعض. تُجمع بيانات جميع الهوائيات وجميع النبضات لتشكيل بنية متعددة الأبعاد تُحسن الدقة دون تكرار العمل. 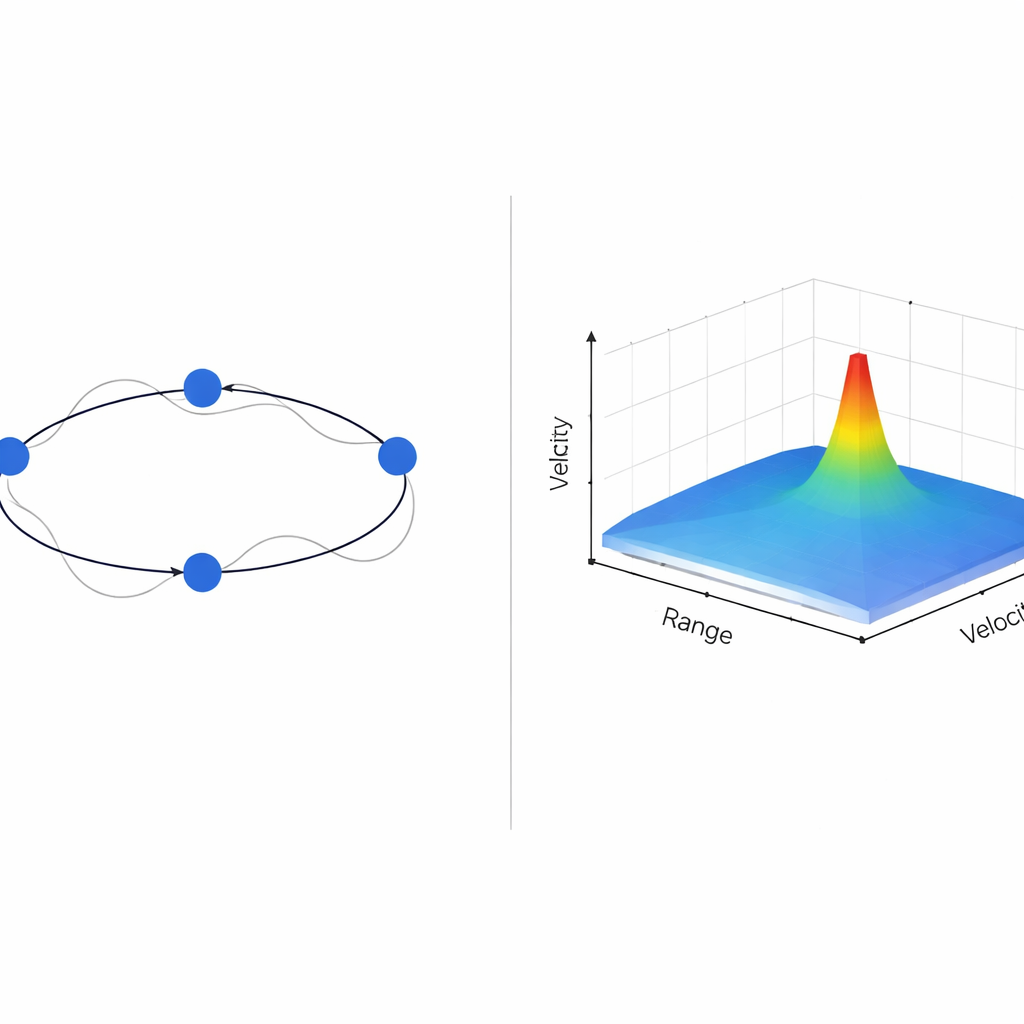
اختبار الطريقة
من خلال سلسلة من المحاكيات، يقارن الباحثون نهجهم القائم على الرسم البياني مع تقنية عالية الدقة مستخدمة على نطاق واسع تعرف باسم MUSIC. يختبرون سيناريوهات بحضور هدف واحد وأهداف متعددة، ويفحصون مدى قدرة كل طريقة على فصل الأجسام القريبة من بعضها، وينظرون في الأداء عندما تكون الإشارات ضعيفة جدًا مقابل الضوضاء. تحقق الخوارزمية المبنية على الرسم البياني عبئًا حسابيًا إجماليًا مماثلًا للطرق الكلاسيكية، لكنها تقدم دقة أعلى في المسافة والزاوية والسرعة. وهي فعالة بشكل خاص في قمع القمم الخاطئة الناتجة عن الضوضاء، مما يؤدي إلى خرائط أهداف أنظف وأكثر موثوقية. حتى عندما تكون نسبة الإشارة إلى الضوضاء ضعيفة—وهي ظروف تتعثر فيها العديد من الطرق التقليدية—تحافظ الخوارزمية الجديدة على حدود خطأ ضيقة في موقع الأهداف وسرعاتها.
ماذا يعني هذا لرادارات العالم الواقعي
بعبارة بسيطة، يوضح هذا العمل كيف أن التعامل مع بيانات الرادار على أنها تعيش على شبكة يتيح معالجة أكثر ذكاءً يمكنها فصل الأهداف الحقيقية عن التشويش بشكل أوضح. للتطبيقات التي تتراوح من الدفاع والتحكم في الحركة الجوية إلى سلامة المركبات والاستشعار البيئي، تعد التقنية المقترحة بدقة أكبر في تتبع عدة أجسام متحركة في ظروف صعبة، دون الحاجة إلى كميات حسابية غير واقعية. من خلال دمج تصميم هوائيات متقدم مع رياضيات قائمة على الرسوم البيانية، يظهر المؤلفون طريقًا عمليًا نحو رادارات ترى أبعد وأوضح وأكثر موثوقية في بيئة كهرومغناطيسية تزداد تعقيدًا.
الاستشهاد: Li, Q., Meng, A., Liao, K. et al. A joint range–angle–velocity estimation algorithm for FDA-MIMO radar based on graph signal processing. Sci Rep 16, 6000 (2026). https://doi.org/10.1038/s41598-026-36124-x
الكلمات المفتاحية: استشعار بالرادار, تتبع الأهداف, معالجة الإشارات, معالجة الإشارات على الرسوم البيانية, FDA-MIMO