Clear Sky Science · ar
خوارزمية A* مدركة للاتجاه وقابلة للتكيف ذاتياً مع دالة إرشاد PPO لتخطيط مسار المركبات الجوية غير المأهولة في المدينة الذكية
مسارات أكثر ذكاءً لطائرات المدينة
تخيل أساطيل من الطائرات الصغيرة لتوصيل الطرود تنسج بين ناطحات السحاب، حاملة الأدوية والطرود أو المستلزمات الطارئة في مدينة مزدحمة. للطيران بأمان وسرعة، يجب على كل طائرة أن تقرر باستمرار إلى أي اتجاه تتجه تاليًا. تقدم هذه الورقة طريقة جديدة لتمكين الطائرات من إيجاد مسارات أفضل في فضاءات المدن الثلاثية الأبعاد المزدحمة، مما يجعل مساراتها أقصر وأكثر سلاسة وموثوقية مقارنة بالأساليب التقليدية.

لماذا إيجاد مسار جيد صعب للغاية
بالنسبة للطائرة، اختيار مسار ليس مجرد رسم خط مستقيم من النقطة أ إلى النقطة ب. عليها تفادي المباني والأشجار ومناطق الطيران الممنوعة مع مراعاة حدود القدرة على الدوران والارتفاع. تعمل طرق التخطيط الكلاسيكية، مثل خوارزمية A* المعروفة، بشكل جيد على خرائط بسيطة لكنها تجد صعوبة في بيئات المدن ثلاثية الأبعاد الواقعية. فهي غالبًا ما تفحص عددًا كبيرًا جدًا من الخطوات المحتملة التالية، وتبذّر قدرة الحوسبة، وقد تنتج مسارات متعرجة أطول مما يجب أو قد تفشل تمامًا عندما تكون البيئة مزدحمة للغاية. ومع تزايد تعقيد المدن الذكية، تصبح هذه الضعف عنق زجاجة خطيرًا أمام مرور جوي آمن وفعّال.
تطوير واعٍ للاتجاه لأداة كلاسيكية
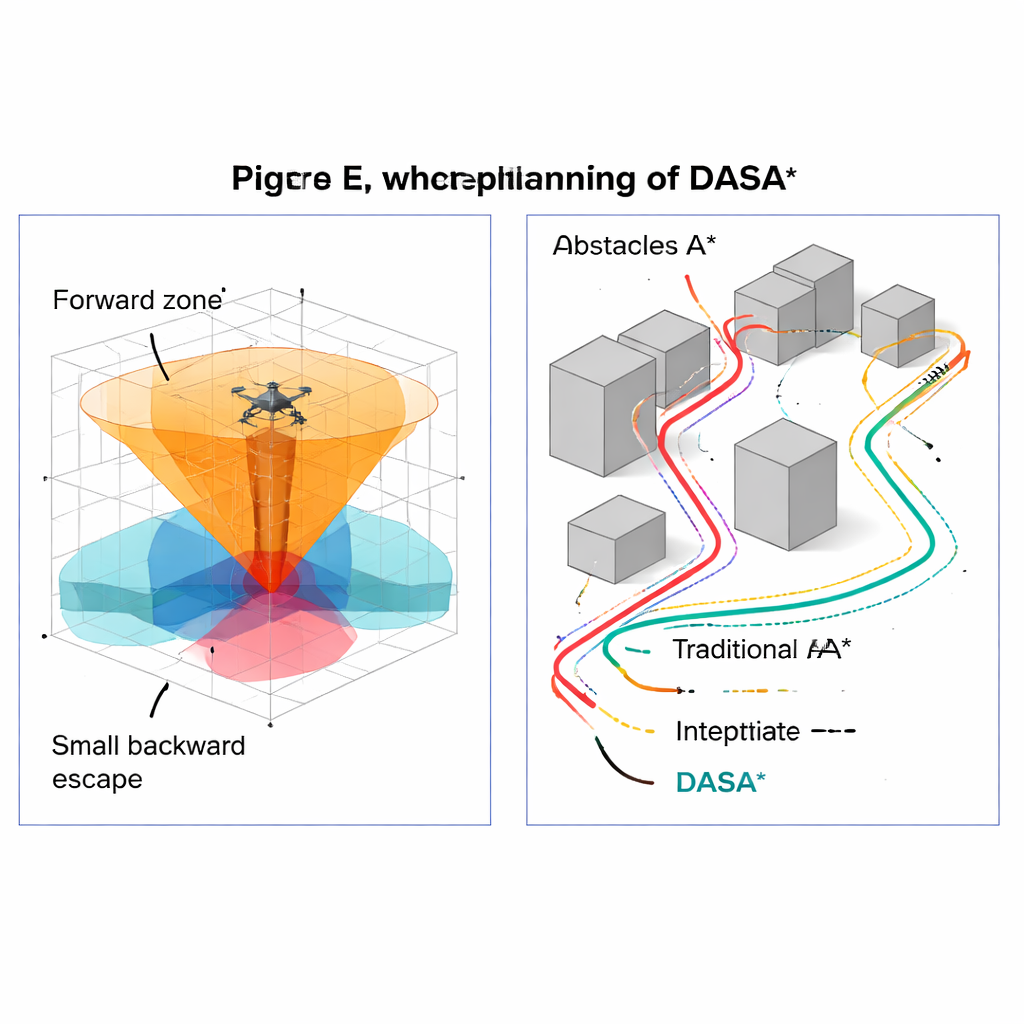
يبني الباحثون على خوارزمية A* ويقترحون نسخة محسّنة تُدعى DASA* (A* المدركة للاتجاه والقابلة للتكيف ذاتيًا). بدلًا من البحث عشوائيًا في جميع الاتجاهات حول الطائرة، تركز DASA* على وجهة الهدف. تصنّف المواقع المرشحة القريبة إلى ثلاث طبقات: تلك التي تقع في الغالب أمام الطائرة باتجاه الهدف، وتلك الواقعة على الجانبين، ومجموعة صغيرة خلفها يمكن أن تساعد على الخروج من الطرق المسدودة. يرصد كاشف توقف بسيط علامات «الاحتباس» في البحث ثم يوسع البحث تلقائيًا من مخروط ضيق متجه للأمام إلى جوار أوسع عند الحاجة. يقلل هذا التوسع المتأنّي والمتوافق مع الهدف من الاستكشاف المهدور بينما يضمن مع ذلك العثور على مسار صالح إذا كان موجودًا.
التكيف مع المساحات المزدحمة والمفتوحة
ميزة رئيسية أخرى في DASA* أنها تغيّر خطوتها اعتمادًا على المحيط. عندما تكون الطائرة بعيدة عن العوائق، يتخذ النظام خطوات أكبر ليغطي الفراغ السهل بسرعة. وعند الاقتراب من المباني أو غيرها من المخاطر، يتحول إلى خطوات أصغر للسماح بالمناورة الدقيقة في الفجوات الضيقة. يتيح هذا «مستوى التكبير» المتغير للمخطط الحركة السريعة حيث يكون الأمر آمنًا والتباطؤ فقط حيث تكون الدقة مهمّة. بعد إيجاد مسار أولي، تزيل مرحلة تعديل مخصصة نقاط العبور غير الضرورية وتناسب منحنى ناعم عبر النقاط الرئيسية المتبقية. النتيجة هي مسار لا يتجنّب الاصطدامات فحسب، بل يبدو أقرب إلى مسار طيران طبيعي قد يختاره طيّار ماهر، مع تقليل الانعطافات المفاجئة.
تعليم الخوارزمية النظر إلى الأمام
تعتمد A* التقليدية على صيغ مسافة بسيطة لتقدير مدى قرب كل موقع من الهدف. تستبدل DASA* هذا التخمين بدليل متعلّم مستند إلى Proximal Policy Optimization (PPO)، وهي تقنية تعليم معزز حديثة. في بيئة تدريبية، يتدرب وكيل افتراضي مرارًا على التحرك نحو هدف في الفضاء ثلاثي الأبعاد أثناء استشعار المسافات وفروقات الارتفاع والمعلومات الاتجاهية. تتعلم شبكة عصبية تدريجيًا مدى وعودية كل حالة وبعد التدريب تعمل كـ«وحدة حدس» قابلة للإدراج في DASA*. يقود هذا الدليل المتعلم البحث بشكل أكثر مباشرة نحو الحلول الجيدة، خصوصًا في التخطيطات المعقدة حيث تكون مسافة الخط المستقيم مضللة.
مدى فعاليته في مدن افتراضية
اختبر الباحثون DASA* في عدة سيناريوهات مدن ثلاثية الأبعاد محاكاة مملوءة بمباني على شكل صناديق وعوائق أسطوانية تحاكي هياكل حضرية حقيقية. قارنوا بينها وبين A* الكلاسيكية وعدة بدائل شائعة، بما في ذلك نسخ محسّنة من أشجار الاستكشاف السريع، سرب الجسيمات، التطور التفاضلي، ونوع آخر من A* يُسمى Theta*. عبر العديد من حالات الاختبار، وجدت DASA* باستمرار مسارات أقصر، ووسعت نقاطًا مرشحة أقل بكثير، وعملت أسرع بكثير — غالبًا أسرع 10 إلى 50 مرة من A* القياسي. كما حافظت على معدل نجاح كامل أو شبه كامل حتى في البيئات الكثيفة الشبيهة بالمتاهات، بينما فشلت بعض الطرق المنافسة في كثير من الأحيان أو أنتجت التفافات طويلة وملتفة.
ما الذي يعنيه هذا للحياة اليومية
بعبارات بسيطة، تمنح DASA* الروبوتات الطائرة شعورًا أفضل بالاتجاه والحكم. من خلال التركيز على الاتجاهات الواعدة، وتكييف مستوى التفصيل مع البيئة المحلية، واستخدام حس متعلم لمدى قربها من النجاح، وتنقيح المسار النهائي، تحول البيانات الخريطة الأولية إلى مسارات طيران فعّالة وناعمة وعملية. إذا تم اعتماد مثل هذا النهج في الأنظمة الحقيقية، فقد يساعد مدن المستقبل الذكية على إدارة توصيلات الطرود والتفتيشات والاستجابات الطارئة بشكل أكثر أمانًا واعتمادية، حتى مع ازدحام السماء وتعقّد البيئات.
الاستشهاد: Zhang, X., Tan, L. & Chai, J. Direction aware and self-adaptive A* algorithm with PPO heuristic for UAV path planning of smart city. Sci Rep 16, 6174 (2026). https://doi.org/10.1038/s41598-026-36066-4
الكلمات المفتاحية: تخطيط مسار المركبات الجوية غير المأهولة, طائرات المدينة الذكية, خوارزمية A*, الملاحة الذاتية, تخطيط حركة الروبوت