Clear Sky Science · ar
الملاحة الذاتية في بيئات خارجية غير منظمة باستخدام التعلم المعزز الموجه بتجزئة دلالية
روبوتات تتعلّم التنزه في الغابة
تخيل روبوتًا صغيرًا يمكنه السير في ممر غابي بمفرده، يتلوى بين الأشجار والصخور دون GPS أو إنسان يمسك عصا التحكم. تصف هذه الورقة نظامًا يعلّم مثل هذه الروبوتات أن "ترى" الممرات في الغابات الكثيفة وتقرر، لحظة بلحظة، كيفية التحرك بأمان إلى الأمام. يحصل العمل على أهمية للروبوتات المستقبلية التي قد تساعد في مراقبة الغابات، الوقاية من حرائق الغابات، عمليات البحث والإنقاذ، وحتى التوصيل الخارجي في أماكن تكون فيها إشارات الأقمار الصناعية ضعيفة أو معدومة.
لماذا الغابات صعبة جدًا للروبوتات
تُعد الغابات من أصعب الأماكن للآلات المستقلة. قد تكون الممرات ضيقة ومتعرجة، الأرض غير مستوية، الفروع والشجيرات تحجب الرؤية في كثير من الأحيان، والأشجار الطويلة تجعل إشارات GPS غير موثوقة. تعتمد طرق الملاحة التقليدية على خرائط دقيقة أو GPS قوي أو حساسات ليزر مكلفة، وغالبًا ما تفترض مساحات واضحة ومهيكلة مثل شوارع المدن أو أرضيات المصانع. في الغابة تنهار هذه الافتراضات: الظلال، وتغير الفصول، والغطاء النباتي الكثيف تربك أنظمة الرؤية البسيطة، بينما تكافح وحدات التحكم القائمة على قواعد صلبة للتعامل مع كل الحالات الفوضوية وغير المتوقعة التي تظهر على ممر حقيقي.
ثلاثة أدمغة تعمل معًا
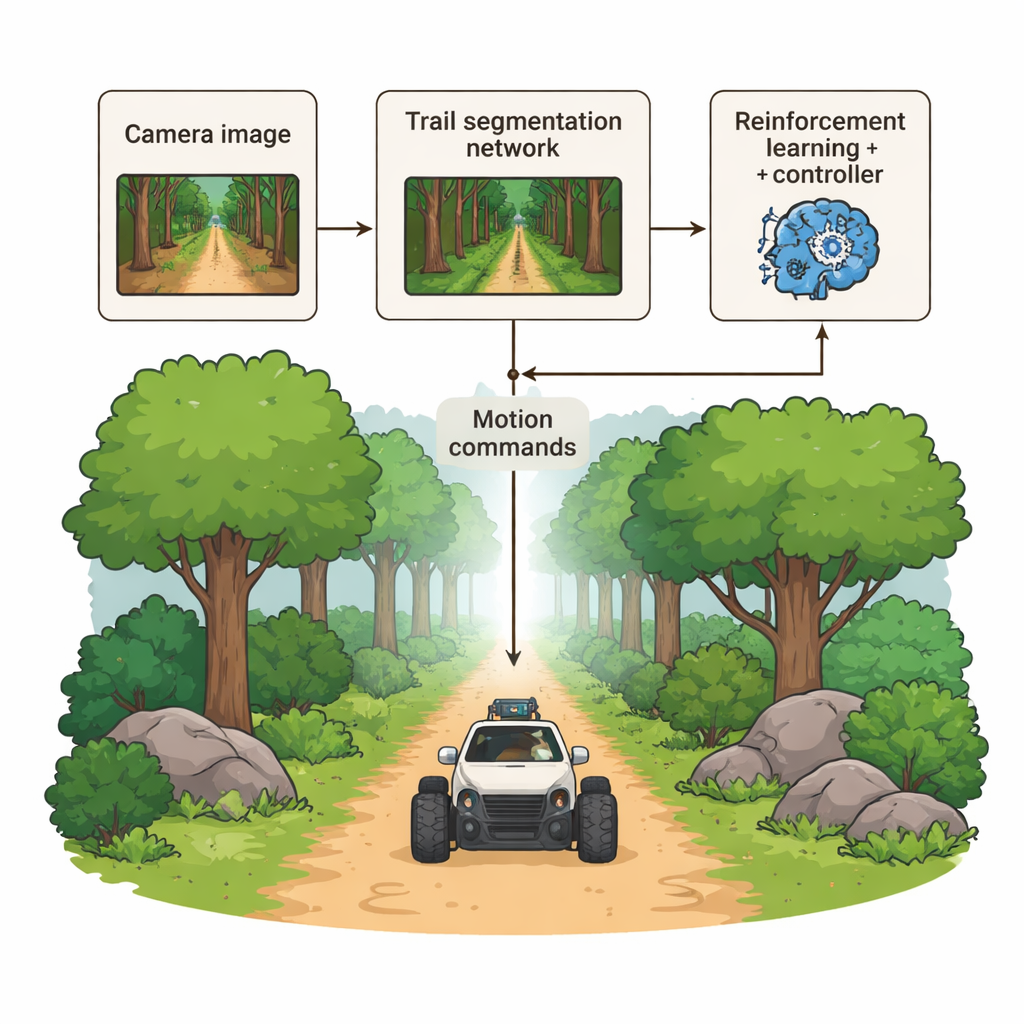
يقترح المؤلفون نظام ملاحة هجين يمنح الروبوتات ثلاثة "أدمغة" تكاملية. أولاً، يقوم وحدة رؤية عميقة بفحص كل صورة كاميرا ويحدد، تقريبًا ببيكسل لبيكسل، أي الأجزاء تنتمي إلى الممر القابل للمشي. ثانيًا، تستخدم وحدة اتخاذ القرار المعتمدة على التعلم التعزيزي لاختيار أوامر توجيه وسرعة سلسة، تكافئ السلوك الذي يبقى على الممر ويتجنّب الاصطدامات ويصل إلى الهدف بكفاءة. ثالثًا، يحول متحكم كلاسيكي الشكل المتوقع للممر إلى حركات عجلات مستقرة، مروقًا الحركات المفاجئة ويحافظ على مسار الروبوت أنيقًا بدلًا من متقطع. بدلًا من شبكة واحدة شاملة وغير واضحة النهاية، تظل هذه الوحدات منفصلة لكنها مرتبطة بإحكام، ما يسمح للمهندسين بفهم كل مرحلة وتصحيحها.
تعليم الرؤية التعرف على الممرات
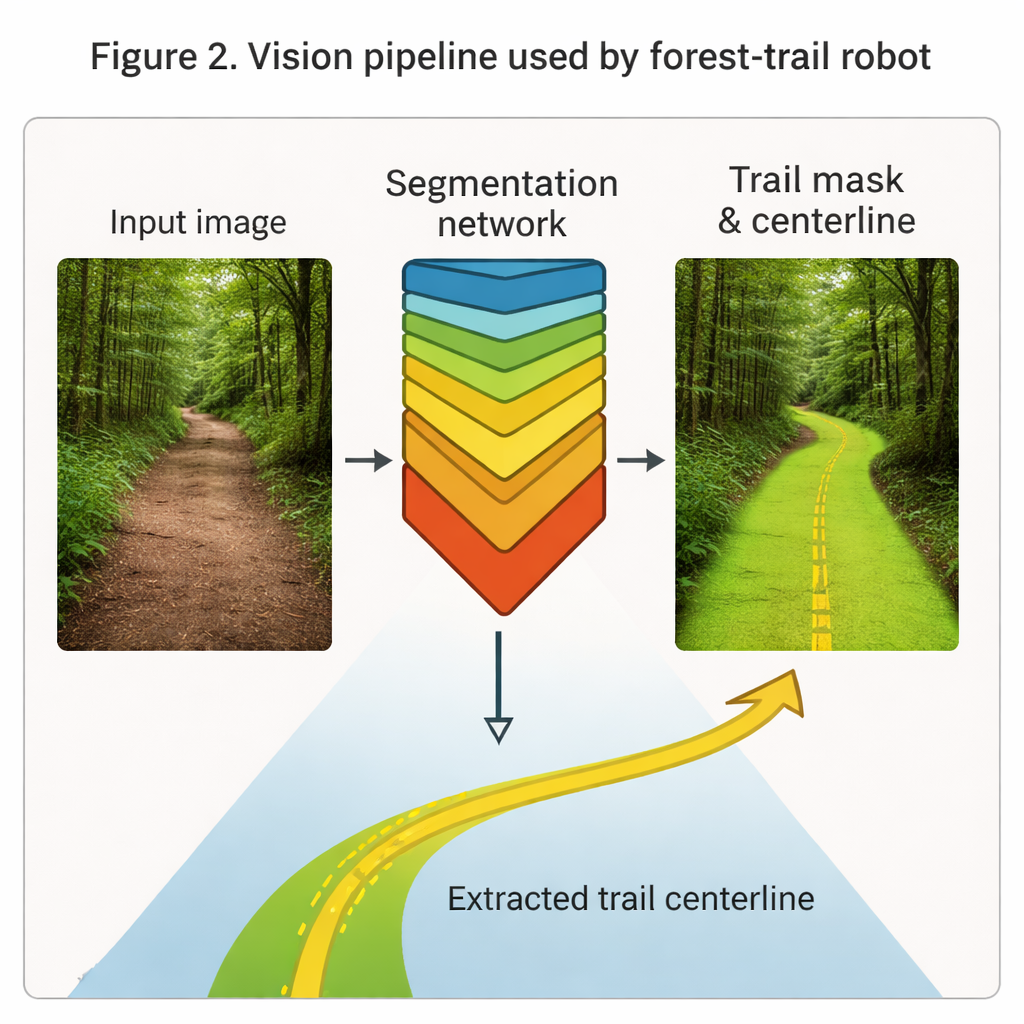
في قلب "عيون" الروبوت شبكة عميقة تُعرف باسم Mask R-CNN، هنا مُعَدَّة لتسليط الضوء على ممرات الغابة في صور ملونة عادية. مدرَّبة على ما يقرب من 24,000 إطار معنَّم من لقطات تنزه حقيقية مصورة من ارتفاع الإنسان وتحت ضوء، وطقس، وأنواع ممرات متنوعة، تتعلم المنظومة طلاء منطقة الممر في كل إطار كقناع نظيف. من هذا القناع تستخلص خطًا مركزيًا رقيقًا يلتقط اتجاه وانحناء الطريق أمامها. في الاختبارات، تحقق وحدة الرؤية تراكبًا عاليًا مع التسميات المرسومة يدويًا ودقة بكسل تزيد عن 90%، محدِّدة الممرات بقوة حتى عندما تخفي الفروع أو الظلال الطريق جزئيًا. تُغذي هذه المؤشرات الهندسية كلا من وحدتي التعلم والتحكم كوصف مضغوط لـ"مكان تواجد المسار".
تدريب روبوت على اتخاذ قرارات جيدة
القطعة الأساسية الثانية هي وحدة القرار، التي تستخدم تقنية تُسمى التعلم المعزز. بدلًا من أن يُقال للروبوت بالضبط ما يفعل، يجرب الروبوت إجراءات في غابة محاكاة واقعية ويحصل على مكافآت للنتائج الجيدة وعقوبات للنتائج السيئة. التقدم على طول الممر أمر مرغوب؛ الابتعاد عنه أو الاصطدام بالعقبات أو التوقف أمر غير مرغوب. خلال حوالي 150,000 خطوة تدريب، تكتشف المنظومة تدريجيًا استراتيجيات تحافظ على تمركزها على الممر، تتعامل مع الانحناءات برشاقة، وترد بحسّ عندما تظهر الفروع أو الصخور في طريقها. للحفاظ على حركات سلسة وآمنة، يمكن مزج الأفعال المتعلمة مع تلك الصادرة عن المتحكم الكلاسيكي، وهو أمر مفيد بشكل خاص في المنحنيات الضيقة أو الظروف المزعجة.
وضع النظام على المحك
لتقييم مدى فاعلية هذا المزيج، بنى الباحثون ثلاث غابات افتراضية مفصّلة: إحداها بممرات ضيقة ومليئة بالعقبات، وأخرى بتضاريس حادة وغير مستوية وعقبات كبيرة، وثالثة مليئة بالتشعبات والنهايات المسدودة والممرات الخاطئة المشتتة. عبر 90 تجربة في هذه الخرائط، وصل الروبوت إلى هدفه دون اصطدام في حوالي 87% من الحلقات، مع متوسط 0.2 اصطدامات فقط لكل مهمة وعادةً ما يبقى ضمن حوالي 30 سنتيمترًا من مركز الممر. كما أنه أنهى المسارات بسرعة وبثبات. عندما أزال المؤلفون أو بسطوا وحدة واحدة في كل مرة، انخفض الأداء بشدة—مما يظهر أن كل المكونات الثلاثة ضرورية. بالمقارنة مع أنظمة حديثة أخرى، بما في ذلك تلك التي تستخدم الماسحات الليزرية، قدّم هذا النهج الهجين المعتمد على الرؤية وحدها أفضل مزيج عام من معدل النجاح والدقة والسلامة.
ماذا يعني هذا لروبوتات العالم الحقيقي
بالنسبة لغير المتخصص، الخلاصة هي أن الروبوتات تتحسن في التنزه مثل مستخدمين حذرين وكفءين للممرات. من خلال الجمع بين حس بصري قوي للسياق ("هذا هو الطريق"), واتخاذ قرارات مبنية على التجربة ("هذه الحركات نجحت من قبل"), وآلية توجيه ثابتة، يتيح النظام المقترح لروبوت عجلات صغير أن يتنقل في غابات معقدة دون خرائط أو GPS. بينما اختُبر العمل في المحاكاة ولا يزال يواجه تحديات مثل الإضاءة القصوى وأنواع الممرات النادرة، فإنه يقدم مخططًا عمليًا لروبوتات ميدانية مستقبلية يمكنها مشاركة البيئات البرية بأمان مع البشر، ومساعدتنا في فحص الغابات ودعم فرق الإنقاذ وإدارة الموارد الطبيعية بشكل أكثر فعالية.
الاستشهاد: Tibermacine, A., Tibermacine, I.E., Akrour, D. et al. Autonomous navigation in unstructured outdoor environments using semantic segmentation guided reinforcement learning. Sci Rep 16, 2633 (2026). https://doi.org/10.1038/s41598-026-36022-2
الكلمات المفتاحية: الملاحة الذاتية, روبوتات الغابات, الرؤية الحاسوبية, التعلم المعزز, التجزئة الدلالية