Clear Sky Science · ar
استراتيجية تحكم بدون مجسات لموضع الممانع على كامل السرعة لمحرك متزامن ذو مغناطيس دائم بناءً على مراقب انزلاقي فائق الالتفاف المحسن وتحسين الانتقال السلس
الحفاظ على ذكاء المحركات الكهربائية دون أجهزة إضافية
من السيارات الكهربائية إلى المشغلات في الطائرات، تعتمد العديد من الآلات الحديثة على نوع خاص من المحركات الكهربائية يسمى المحرك المتزامن ذو المغناطيس الدائم (PMSM). هذه المحركات فعالة وقوية، لكنها عادة ما تحتاج إلى مجسات دقيقة لتتبع سرعة الدوران وموقع العضّو الدوار. تضيف المجسات تكلفة وقد تتعرض للفشل في البيئات القاسية. تستعرض هذه الدراسة كيفية تشغيل هذه المحركات بسلاسة ودقة عبر نطاق السرعات الكامل دون استخدام أي مجسات ميكانيكية على الإطلاق.
لماذا من الصعب الاستغناء عن المجسات
في نظام تشغيل نموذجي لـ PMSM، تُركّب مجسات موضع صغيرة على عمود المحرك لإبلاغ نظام التحكم بموقع العضّو الدوار بدقة. هذه المعلومة حاسمة لدفع التيار في الملفات في اللحظة المناسبة، مثل دفعة محسوبة على دوّامة دوّارة. ومع ذلك، قد تكون المجسات هشة، كبيرة الحجم ومكلفة. حاول المهندسون طويلاً استبدالها بطرق "بدون مجسات" تستنتج موقع العضّو الدوار من الإشارات الكهربائية للمحرك نفسه. المشكلة أن لا طريقة واحدة تعمل جيداً عبر جميع السرعات. عند السرعات المنخفضة تكون الإشارات الكهربائية ضعيفة، بينما عند السرعات العالية تصبح الحيل البسيطة صاخبة وغير دقيقة. سد هذه الفجوة دون ارتجاج أو اهتزاز أو فقدان السيطرة كان تحدياً مستمراً.
طريقتان ذكيتان لاستماع المحرك
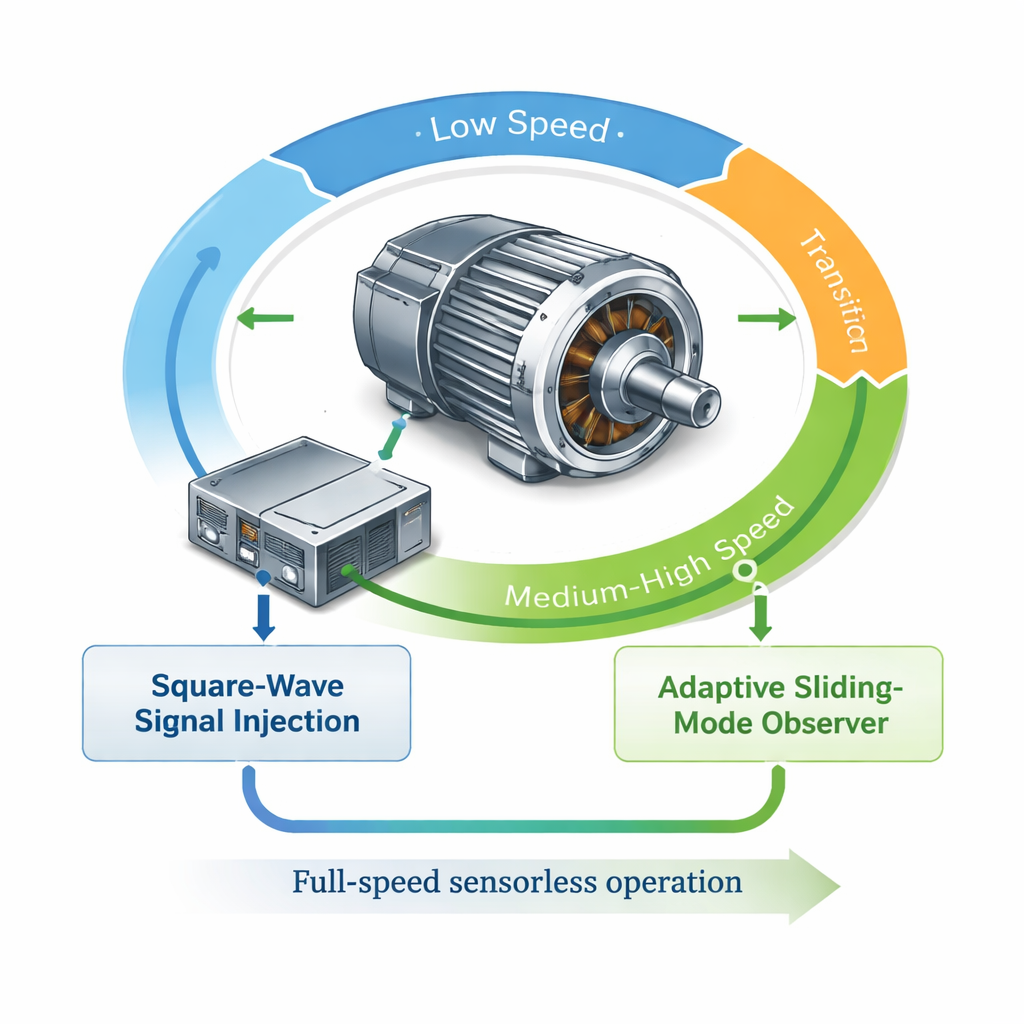
لتغطية نطاق السرعات الكامل، يجمع المؤلفون بين تقنيتين تكميليتين بدون مجسات. عند السرعات المنخفضة، حيث تكون التغذية الراجعة الكهربائية الطبيعية للمحرك صغيرة جداً بحيث لا يمكن قياسها بثقة، يقومون بحقن إشارة جهد مربعة سريعة في الملفات عن قصد. يستجيب المحرك بشكل مختلف اعتماداً على زاوية العضّو الدوار، لذا من خلال تحليل التيار عالي التردد الناتج، يمكن للمتحكم استنتاج موقع العضّو الدوار. تعمل طريقة "حقن التردد العالي" مثل إرسال إشارة استكشافية خفيفة وقراءة الصدى. عند السرعات المتوسطة والعالية، ينتج المحرك تغذية راجعة طبيعية أقوى تعرف بالقوة الدافعة الكهربائية العكسية. هنا يستخدم الفريق مراقباً رياضياً متقدماً يتابع سلوك المحرك ويقدّر موقع وسرعة العضّو الدوار من القياسات الكهربائية للجهود والتيارات.
جعل المراقب الرقمي أذكى وأكثر هدوءاً
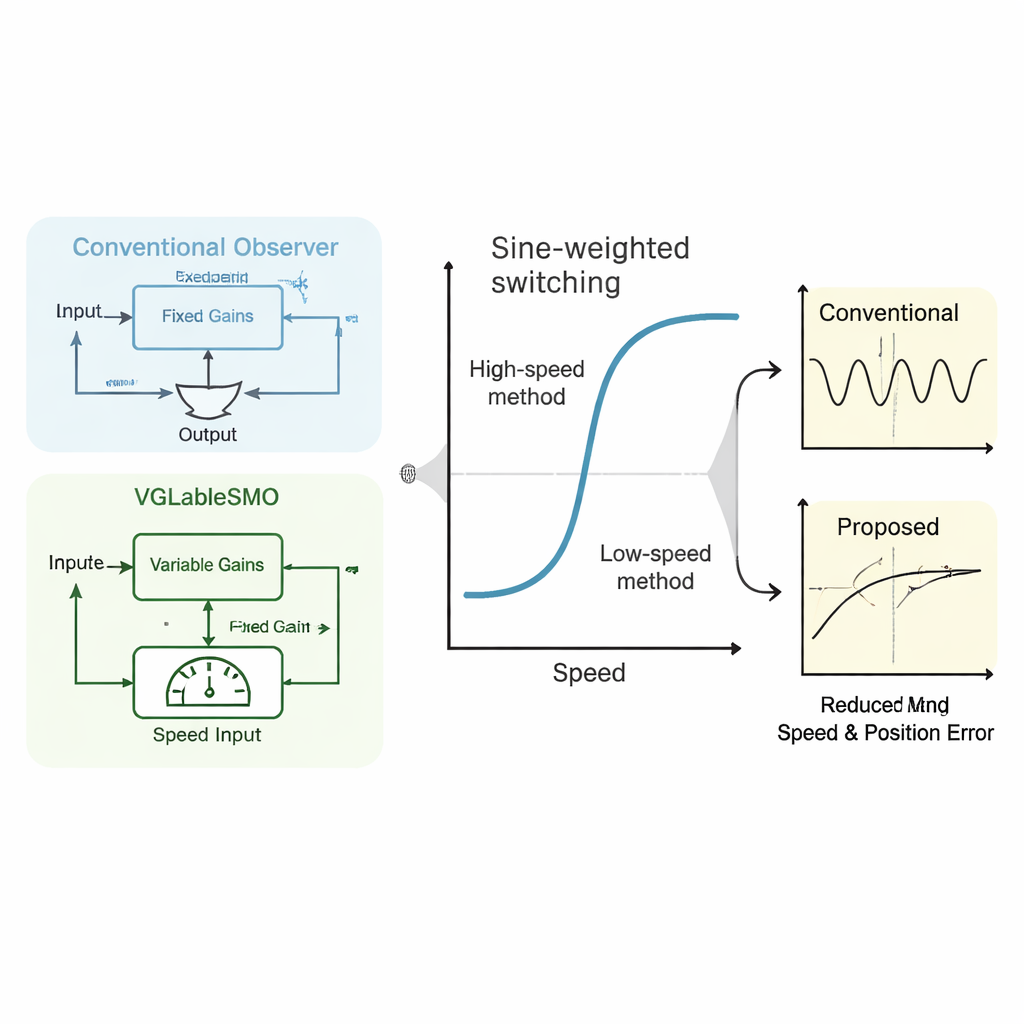
الابتكار الأساسي على جانب السرعات العالية هو مراقب مطوّر يُدعى مراقب انزلاقي فائق الالتفاف خطي متغير الكسب (VGLSTSMO). تُقدَّر المراقبات الانزلاقية التقليدية لمقاومتها للضوضاء والاضطرابات، لكنها غالباً ما تعاني من "الارتعاش"، وهو تذبذب صغير وسريع يمكن أن يتسرب إلى عزم الدوران والسرعة. كما أنها تعتمد على إعدادات داخلية ثابتة قد تؤدي جيداً في حالة تشغيلية واحدة وتؤدي بشكل سيئ في أخرى. يقوم المراقب المقترح بضبط كسبه الداخلي تلقائياً مع تغير سرعة المحرك ويضيف حد تصحيحي يسحب التقديرات بلطف نحو القيم الحقيقية. يقوم آلية تكيفية أيضاً بتحسين تقدير الجهد الداخلي للمحرك، مما يحسّن دقة كل من السرعة والموقع. تُظهر المحاكاة الحاسوبية أن هذا المراقب الأذكى يقلّل خطأ الموضع عند السرعات المتوسطة–العالية من حوالي 0.9 راديان إلى نحو 0.2 راديان ويقصر زمن استقرار النظام بعد تغيير الحمل.
تنعيم المصافحة بين السرعات المنخفضة والعالية
تشغيل طريقتين تقديريتين مختلفتين يطرح مشكلة أخرى: كيفية الانتقال بسلاسة بينهما مع تسارع المحرك. النهج البسيط هو تلاشي طريقة وإدخال الأخرى باستخدام وزن خطي مستقيم، لكن ذلك قد يسبب مطبات في العزم والسرعة. يقترح المؤلفون دالة وزن أكثر لطفاً على شكل جيب. داخل نطاق الانتقال المختار، يقوم نظام التحكم تدريجياً بتحويل الثقة من طريقة السرعة المنخفضة إلى المراقب عالي السرعة باتباع منحنى موجي سلس بدلاً من منحنى حاد. يقلّل هذا المزج المحسّن بشكل ملحوظ القفزات في السرعة والعيوب الزاويّة أثناء التبديل، ويخفض الخطأ الزاوي العابر ويقصر زمن استقرار الأخطاء إلى النصف.
ماذا يعني هذا للآلات في العالم الحقيقي
بشكل عام، تُقدم الاستراتيجية المجمعة — استكشاف المحرك عند السرعات المنخفضة، استخدام مراقب تكيفي عند السرعات الأعلى، والتبديل بينهما بوزن جيبي سلس — تحكماً مستقراً ودقيقاً عبر نطاق السرعات الكامل دون مجسات ميكانيكية. في المحاكاة، تحافظ الطريقة المقترحة على تجاوز السرعة والأخطاء المستقرة منخفضة مع تجنّب الارتعاش القاسي الذي يمكن أن يسبب ضوضاء وتآكل وعدم راحة. بالنسبة للتطبيقات اليومية، يعني ذلك أن المركبات الكهربائية ومحركات الصناعة وأنظمة الدفع قد تصبح أكثر موثوقية وأكثر صغرًا وأرخص في التصنيع، مع الحفاظ على تحكم حركي دقيق دون الاعتماد على مجسات ضعيفة التركيب على العمود.
الاستشهاد: Zhang, X., Li, P., Wang, B. et al. Full-speed domain position sensorless control strategy for PMSM based on improved super-twisting sliding-mode observer and smooth transition optimization. Sci Rep 16, 5730 (2026). https://doi.org/10.1038/s41598-026-35994-5
الكلمات المفتاحية: التحكم بالمحرك بدون مجسات, محرك متزامن ذو مغناطيس دائم, مراقب انزلاقي, حقن إشارة ترددية عالية, أنظمة القيادة الكهربائية