Clear Sky Science · ar
تقدير العبء المعرفي في الجراحة بمساعدة الروبوت باستخدام ميزات الزمن والتردد من فترات EEG عبر انحدار الغابة العشوائية
لماذا يهم الجهد الذهني في جراحة الروبوت
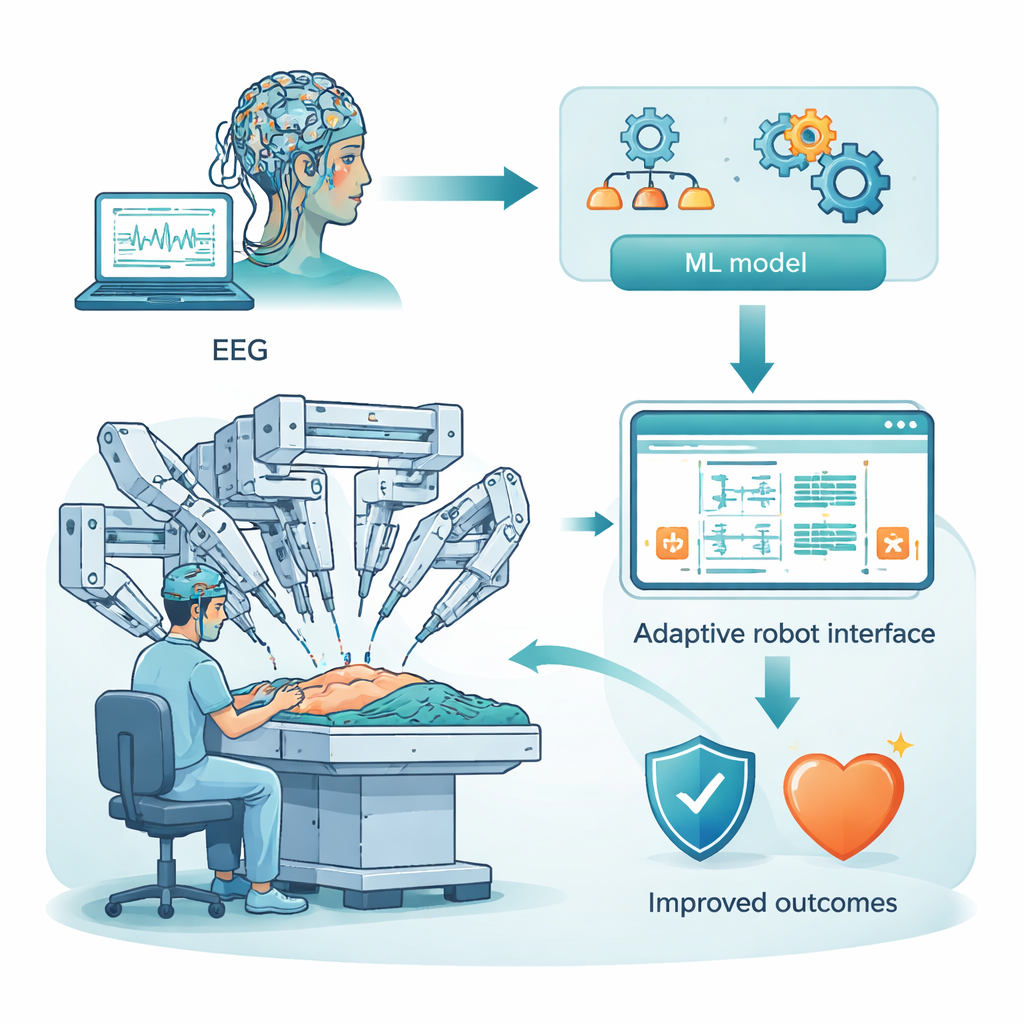
تعد الجراحة بمساعدة الروبوت بفتحات أصغر وتعافي أسرع وأيادي أكثر ثباتًا. لكن خلف الروبوت يجلس جراح بشري يمكن أن يثقل عليه الموقف بفعل مرئيات معقدة، عناصر تحكم متعددة، وقرارات ذات مخاطر عالية. تطرح هذه الدراسة سؤالًا بسيطًا بتبعات كبيرة: هل يمكننا قراءة إشارات دماغ الجراح في الوقت الفعلي لتقدير مدى إجهاده العقلي، ثم استخدام تلك المعلومة للحفاظ على يقظته وسلامة المرضى؟
الاستماع إلى الدماغ أثناء جراحة الروبوت
بدلًا من الاعتماد على قوائم فحص أو الحدس، لجأ الباحثون إلى تخطيط الدماغ الكهربائي (EEG)، تقنية تقيس إشارات كهربائية صغيرة على فروة الرأس. استخدموا مجموعة بيانات عامة تضم 25 شخصًا يؤدون مهام جراحية بمساعدة الروبوت أثناء ارتدائهم قبعة بها 128 قطبًا كهربائيًا. تلتقط هذه الحساسات إيقاعات من مناطق دماغية مختلفة: الأمامية (التخطيط واتخاذ القرار)، الجانبية (السمع والذاكرة)، العلوية (اللمس والوعي المكاني)، والخلفية (البصر). الهدف كان تحويل هذه الإشارات الخام والمشحونة بالضجيج إلى تقدير مستمر لـ "العبء المعرفي" — مدى عمل الدماغ صعوبةً لحظة بلحظة.
تنقية وتكثيف إشارات الدماغ
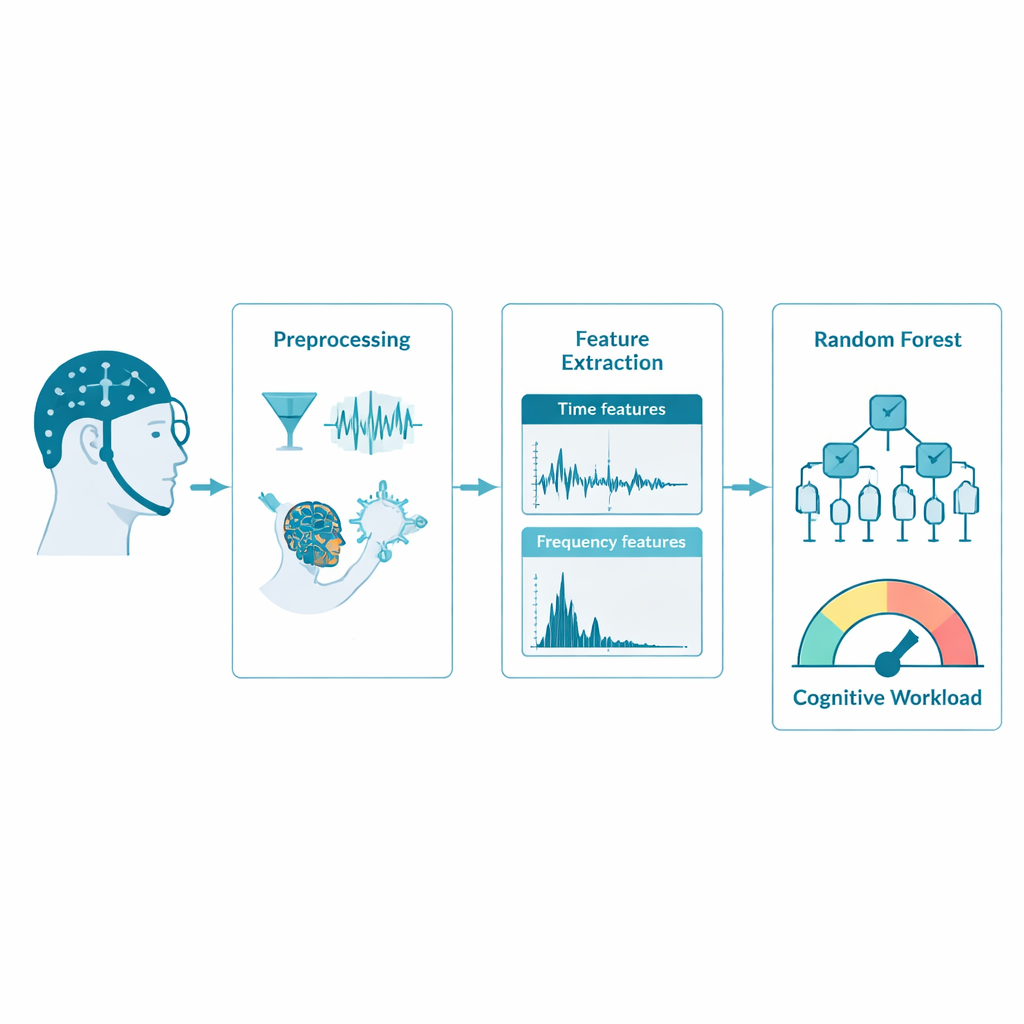
يتصرف EEG الخام أشبه بشبكة كهرباء في مدينة أكثر من كونه قراءة دماغية واضحة: فهو مليء بتداخلات من طرف العينين، تشنجات العضلات، وخطوط التيار. بدأ الفريق بتنظيف البيانات عبر ترشيح الترددات غير المرغوب فيها واستخدام طريقة رياضية تسمى تحليل المكونات المستقلة لإزالة أثر العين والعضلات. ولجعل النظام سريعًا بما يكفي للاستخدام شبه الفوري، خفضوا معدل التسجيل من 500 إلى 128 عينة في الثانية. أظهرت مقارنات دقيقة لخرائط الدماغ والسبكترام قبل وبعد هذه الخطوة أن الأنماط الرئيسية قد حافظت على نفسها، ما يعني أن الإشارات ظلت مفيدة علميًا بينما أصبحت أرخص بكثير من ناحية المعالجة.
تحويل الموجات إلى أرقام ذات معنى
بعد ذلك، قطع الباحثون إشارة EEG المستمرة إلى "فترات" مدتها ثانية واحدة ووصفوا كل مقطع صغير بإحصائيات بسيطة ومحتوى ترددي. التمييزات الزمنية، مثل متوسط حجم الإشارة، التباين، عدم التماثل، وعدد مرات عبور الموجة للصفر، التقطت الشكل والطاقة العامة للنشاط الدماغي. بينما ركزت الميزات الترددية على مقدار الطاقة في نطاقات كلاسيكية مثل ثيتا (مرتبطة بالجهد والذاكرة العاملة)، ألفا (الراحة والكبت)، بيتا (التركيز النشط)، وغاما (العمليات المعقدة). تشكل هذه الأرقام معًا بصمة مدمجة لحالة الدماغ في كل ثانية، جاهزة ليَتعلم منها الحاسوب.
تعليم غابة من أشجار القرار لقراءة العبء
لربط هذه البصمات بالتعب العقلي، استخدم الفريق طريقة تعلم آلي تسمى انحدار الغابة العشوائية. بدلًا من صيغة وحيدة معقدة، يبني هذا الأسلوب العديد من أشجار القرار البسيطة التي يقدم كل منها تنبؤًا، ثم يجمعها في إجابة "جماعية" أكثر موثوقية. تعلّم النموذج توقع مدى تنشيط كل منطقة دماغية، معاملةً ذلك التنشيط كمؤشر على الجهد الذهني. عبر المناطق الجبهية والزمانية والجدارية والقذالية، طابق النموذج التنشيط الحقيقي جيدًا جدًا، مع درجات دقة (R²) أعلى من 0.93 ونتائج قوية بشكل خاص في المنطقة الزمنية التي تساعد على دمج الصوت والذاكرة والإدراك أثناء المهام المجهدة.
ما يكشفه النموذج عن الدماغ العامل
من خلال فحص الميزات التي اعتمدت عليها الغابة العشوائية أكثر من غيرها، أضاءت الدراسة أيضًا كيفية انعكاس إشارات الدماغ للإجهاد الذهني. كانت مقاييس طاقة الإشارة والنقاط المتفجرة (جذر المتوسط التربيعي والفرط) إلى جانب الطاقة في نطاقات ترددية محددة معلوماتية بشكل خاص. ركزت مناطق مختلفة على ميزات مختلفة: على سبيل المثال، توافقت نشاطات بيتا وغاما السريعة في المناطق الجدارية والقذالية مع المعالجة البصرية والمكانية المكثفة، بينما عكست أنماط الإشارات الجبهية عبء اتخاذ القرار. تشير هذه البصمات الخاصة بالمناطق إلى أن الأسلوب يمكن تكييفه في المستقبل لقبعات EEG أخف تركز فقط على أكثر المناطق إفادة.
من الدراسة المخبرية إلى غرف العمليات الأكثر أمانًا
بالنسبة لغير المتخصصين، الخلاصة واضحة: ترسم الدراسة وصفة عملية لتحويل حساسات فروة الرأس والخوارزميات الذكية إلى "مقياس جهد ذهني" مستمر للجراحين. بينما يعتمد العمل الحالي على بيانات مؤرشفة من مجموعة محدودة من المشاركين، فإنه يوضح أنه مع تنظيف وتصميم ميزات دقيقين، يمكن لنموذج تعلم آلي بسيط نسبيًا تتبّع العبء المعرفي بدقة عالية وتكلفة حسابية منخفضة. في المستقبل، قد تساعد مثل هذه الأنظمة كونسولات الروبوت على تبسيط العروض تلقائيًا، ضبط الإيقاع، أو الإشارة إلى لحظات التحميل الزائد، داعمةً عقول الجراحين بموثوقية كما تدعم الروبوتات أيديهم بالفعل.
الاستشهاد: Atheef G A, M., Powar, O.S. Estimating cognitive workload in robot assisted surgery using time and frequency features from EEG epochs with random forest regression. Sci Rep 16, 7624 (2026). https://doi.org/10.1038/s41598-026-35986-5
الكلمات المفتاحية: العبء المعرفي, الجراحة بمساعدة الروبوت, مراقبة EEG, تعلّم الآلة, واجهة دماغ-حاسوب