Clear Sky Science · ar
تأثير المعلمات الهيكلية على فضاء عمل روبوتات دلتا الموازية وتحسين قابلية المسار لتطبيقات فرز أوراق الشاي الطازجة
انضمام الروبوتات إلى مصنع الشاي
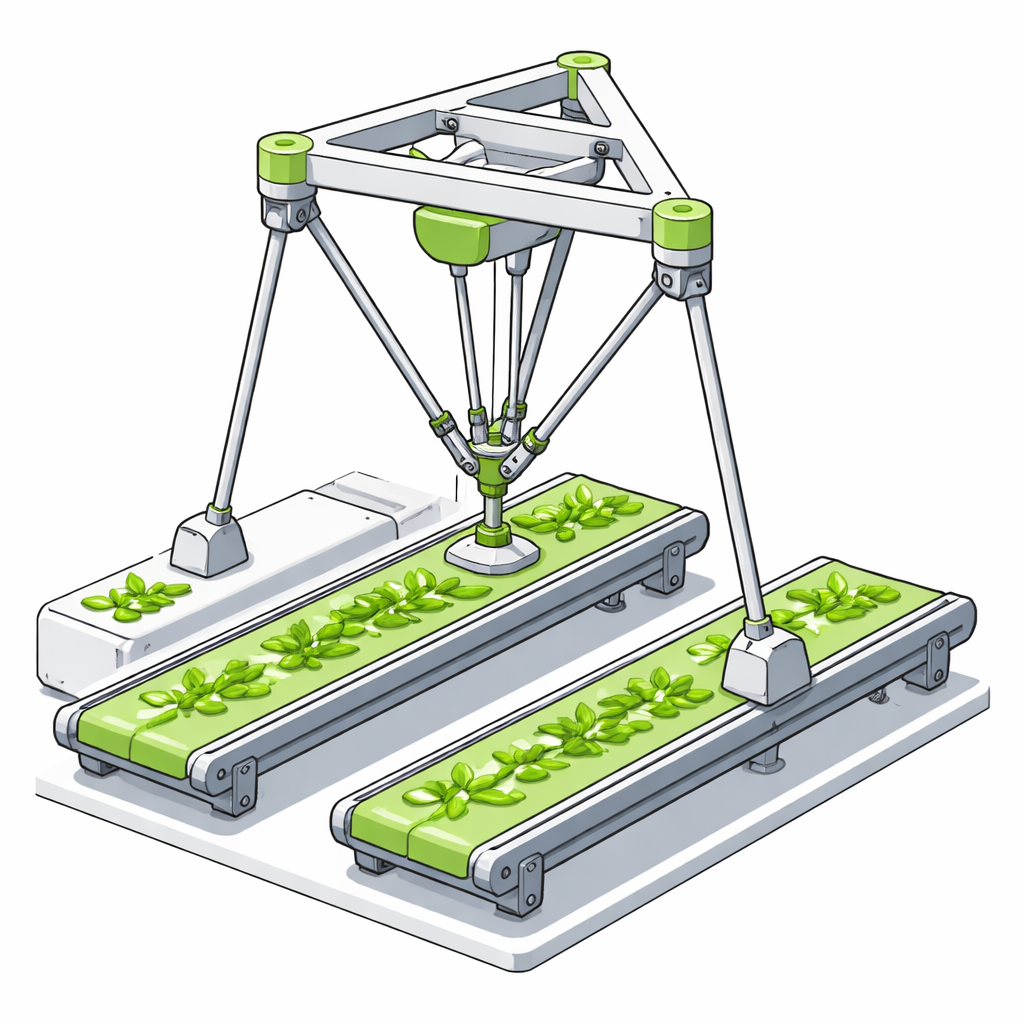
أوراق الشاي الطازجة حساسة: سحق البراعم أو كدمة الورقة يضعف المشروب النهائي. ومع ذلك، فإن فرز هذه الأوراق باليد عمل متعب وبطيء. تستكشف هذه الورقة كيف يمكن تعديل روبوت صناعي خفيف وسريع—يطلق عليه روبوت دلتا—حتى يتحرك بسرعة ودقة أعلى على أحزمة نقل الشاي بينما يتعامل مع الأوراق بلطف وبموثوقية.
لماذا تحتاج أوراق الشاي إلى معاملة خاصة
في عمليات تصنيع الشاي الحديثة، يُعد فرز الأوراق الطازجة أمرًا حاسمًا للجودة والسعر. يعجز العمال البشر عن مجاراة السرعة والحفاظ على الاتساق، خاصة خلال فترات الدوام الطويلة. تبدو روبوتات دلتا—المستخدمة على نطاق واسع في التعبئة عالية السرعة—خيارًا طبيعيًا: فهي صلبة ودقيقة وقادرة على التحرك بسرعات ملحوظة. ومع ذلك، فقد استهدفت معظم التصاميم السابقة أشياء عامة مثل الصناديق أو المكسرات، وليس براعم الشاي الهشة المحصورة في منطقة ضيقة بين حزامي نقل. يجب أن يتوافق «فضاء عمل» الروبوت—المنطقة ثلاثية الأبعاد التي يمكنه الوصول إليها—مع هذه المنطقة الضيقة ويتبع حركة على شكل بوابة محددة: القبض، الرفع، الانتقال عبر، والوضع، كل ذلك دون اصطدام بأجزائه أو تفويت الأهداف.
كيف يحدد شكل الروبوت ما يمكنه الوصول إليه
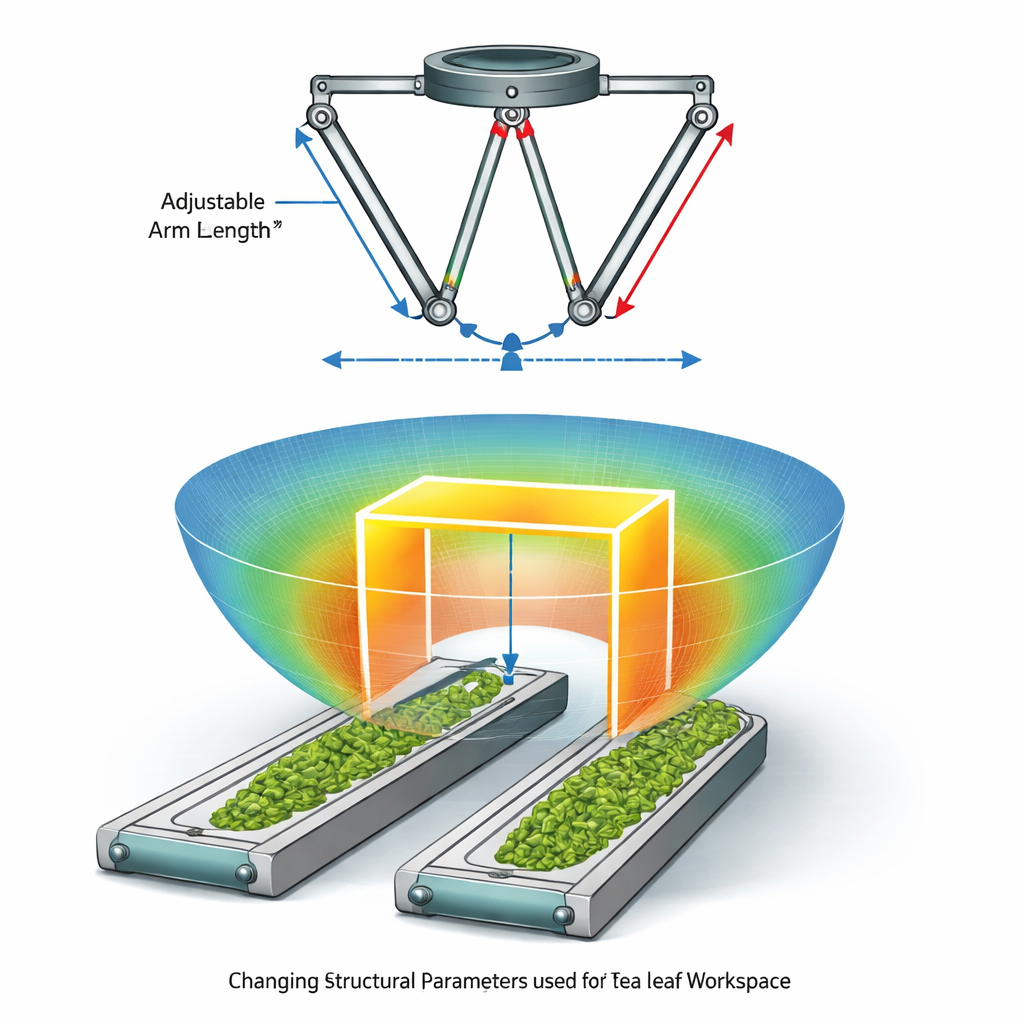
يبدأ المؤلفون ببناء وصف رياضي مفصّل لحركة روبوت دلتا. يربطون زوايا مفاصل القيادة الثلاثة بالموقع الدقيق للمنصة المتحركة الصغيرة التي تحمل مِمسكًا شفاطيًا. باستخدام حسابات أمامية (من الزوايا إلى الموضع) وعكسية (من الموضع إلى الزوايا)، يحددون كل نقطة يمكن لنهاية الممِسك الوصول إليها فعليًا عندما تُقَيَّد زوايا المفاصل ضمن نطاق آمن. بعد ترميز هذه المعادلات في MATLAB، يحاكون الحجم الكامل الممكن الوصول إليه ويعرضونه من عدة زوايا على شكل سحابة نقاط ملونة تشبه الوعاء. يصبح هذا الفضاء أساسًا للحكم على ما إذا كان تصميم ميكانيكي معيّن قادرًا على التعامل مع مسار فرز الشاي.
اختبار العديد من التصاميم بتجارب افتراضية
بدلاً من بناء نماذج أولية مادية متعددة، تعامل الفريق مع أربعة اختيارات هندسية رئيسية كأدوات ضبط: طول الأذرع العلوية (L)، طول الأذرع السفلية (l)، نصف قطر مثلث القاعدة الثابت (R)، ونصف قطر المثلث المتحرك (r). يستخدمون تصميمًا تجريبيًا متعامدًا، يمثّل عيّنة فعّالة من مجموعات هذه المعلمات الأربع عند ثلاث مستويات لكل منها، ليعطي تسعة روبوتات افتراضية. لكل منها، يحسب البرنامج حجم فضاء العمل الكلي ويبين كيف يتقاطع مع صندوق مسار موحد على شكل بوابة أبعاده 200 مم ارتفاعًا، 400 مم عرضًا، و200 مم عمقًا. يتيح ذلك للباحثين رؤية ليس فقط حجم كل فضاء عمل، بل أيضًا ما إذا كان يغطي فعليًا المنطقة التي تتحرك فيها أوراق الشاي على الأحزمة.
معرفة أي الأبعاد الأهم
بمقارنة التصاميم التسعة المحاكاة، ترتّب الدراسة قوة تأثير كل خيار هيكلي على مدى الوصول القابل للاستخدام. الفائز الواضح هو طول الذراع السفلية السلبية: فالأذرع السفلية الأطول تُوسّع فضاء العمل إلى حد كبير. التالي في الأهمية هو طول الذراع العلوية النشطة، الذي يزيد أيضًا نطاق الحركة لكنه قد يسبب اهتزازًا إذا طُوّل كثيرًا. لنصف قطر القاعدة تأثير متوسط؛ فإذا كانت القاعدة عريضة جدًا، قد تصطدم الأذرع المتحركة بالإطار بسهولة، مما يقلص الحجم القابل للاستخدام فعليًا. أما نصف قطر المنصة المتحركة فله أضعف تأثير، لكن منصة أصغر قليلًا تساعد إلى حد ما بفتح مساحة لحركة الأذرع. تُظهر تحليلات النطاق والتباين أنه بينما تعطي بعض مجموعات المعاملات أكبر فضاء عمل كلي، فإنها لا تغطي بالضرورة المنطقة الضيقة على شكل بوابة التي تهم فرز الشاي.
تصميم يناسب خط إنتاج الشاي
يتبين أن التكوين الأكثر عملية ليس ذلك الذي يملك أكبر حجم إجمالي، بل ذلك الذي يلفّ فضاء عمله بدقة حول مسار الشكل البوابي. تركيبة معيّنة—أذرع علوية بطول 250 مم، أذرع سفلية بطول 400 مم، نصف قطر قاعدة 90 مم، ونصف قطر منصة متحركة 50 مم—تغطي بالكامل المسار المطلوب بين الحزامين بينما تحافظ على الروبوت مدمجًا ومستقرًا. عند ارتفاع تشغيلي يقارب 325 مم فوق مستوى المرجع، يحقق الروبوت أوسع امتداد قابل للاستخدام، أكثر من كافٍ لعبور الحزامين وإتمام دورة القبض–الرفع–الانتقال–الوضع دون مغادرة المنطقة الآمنة.
ما الذي يعنيه هذا لمصانع الشاي المستقبلية
بالنسبة لغير المتخصصين، الرسالة الأساسية هي أن تغييرات صغيرة في أطوال أطراف الروبوت وأحجام المنصات يمكن أن تحدث فرقًا بين آلة تتحرك بشكل مثير للإعجاب في فضاء مفتوح وآخرى تعمل بشكل موثوق على خط إنتاج حقيقي. من خلال قياس كيفية تشكيل كل معلمة هيكلية للحجم الممكن الوصول إليه وتداخله مع مسار بوابوي واقعي، تقدم هذه الدراسة وصفة لتصميم روبوتات دلتا تفرز أوراق الشاي بسرعة ودقة وبأقل تلف ممكن. يمكن أن توجه نفس المنهجية تصميم روبوتات مخصصة لأغذية أو منتجات هشة أخرى حيث يجب تحقيق السرعة والدقة والمعاملة اللطيفة معًا.
الاستشهاد: Ren, C., Zheng, W. & Wang, R. Influence of structural parameters on the workspace of delta parallel robots and path adaptability optimization for tea fresh leaf sorting applications. Sci Rep 16, 6651 (2026). https://doi.org/10.1038/s41598-026-35969-6
الكلمات المفتاحية: روبوت دلتا, فرز أوراق الشاي, فضاء عمل الروبوت, التقاط ووضع, الأتمتة الصناعية